
基于时空特性以及需求响应的DG和EV充电站多目标优化配置
2021-11-20 08:34:10刘丽军陈贤达郑文迪徐启峰
电力自动化设备 2021年11期
刘丽军,吴 桐,陈贤达,郑文迪,徐启峰
(1. 福州大学 电气工程与自动化学院,福建 福州 350108;2. 福建省新能源发电与电能变换重点实验室,福建 福州 350108;3. 国网福建省电力有限公司福州供电公司,福建 福州 350009)
0 引言
近年来,国内外许多学者对大量接入电网的可再生分布式电源DG(Distributed Generation)与电动汽车EV(Electric Vehicle)进行了研究[1-3],规划重心逐渐从使电网侧获得更好的收益向使用户侧获得更加满意的用电体验倾斜。文献[4]基于全寿命周期成本对充电网络进行规划,考虑地理因素使用伏罗诺伊图对已有的充电站充电服务区域进行划分,指导车主结合电池状态选择合适的充电站;文献[5]考虑道路网络对EV充电需求的影响,提出了充电站最优规划两阶段方法,并采用遗传算法求解混合整数非线性规划问题;文献[6]在考虑出租车随机行为特性以及道路行程时间可靠性的基础上,基于逼近理想排序法(TOPSIS)评估得到最优的充电站规划方案。相较于传统DG 与EV 独立规划的方案,联合规划可以促进间歇性DG 出力与EV 充电负荷之间的时序特性互补,实现EV 对DG 的就地消纳,进一步提高间歇性DG 在电网中的渗透率。为此,文献[7]建立了计及DG 出力相关性和EV 充电负荷随机性的双层规划模型,并应用CPLEX 中的工具包对所建模型进行求解,结果证明协调规划能有效降低负荷波动,但在分析EV 充电负荷时未考虑EV 充电需求的复杂时空分布问题。
目前已有研究者从驾驶者角度出发,对EV充电需求的时空特性进行了理论研究,文献[8]基于“容量化流动加油位置模型”,提出了交通和电力网络相互耦合的充电设施选址定容方法;文献[9]提出了一种基于起讫点(OD)矩阵和云模型的充电负荷时空分布预测方法;文献[10]根据不同类型EV的出行情况,模拟EV的行驶状态,预测EV充电需求在路网中的时空分布,但未综合考虑如何将EV充电负荷的时空分布应用于配电网的优化配置模型中。
为此,本文考虑EV 充电需求的时空分布,构建了DG 和EV 充电站的多目标协调优化配置模型,借助交通规划软件TransCAD 得到出行概率矩阵,基于出行概率矩阵模拟EV 的行驶轨迹,得到EV 在一天中的荷电状态SOC(State Of Charge),确立不同时刻的充电需求时空分布;基于改进K-means 聚类算法构建风-光-负荷的典型运行场景,综合考虑需求响应的实时电价,以综合效益最高、系统负荷波动指标最小、充电耗时成本最少为目标,建立DG 和EV 充电站的联合优化配置模型。最后结合IEEE 33 节点配电网与29 节点交通路网,对所提模型的有效性进行验证。
1 交通路网模型
1.1 交通路网拓扑模型
作为EV的行驶载体,分析交通路网拓扑结构是获取EV 充电需求时空分布的前提。某交通路网的拓扑结构见附录A 图A1,所有道路都为双行道,描述其拓扑结构的邻接矩阵D如式(1)所示,其元素dij表示各节点之间的连接关系,计算式如式(2)所示。生成矩阵D后,基于改进的Floyd 最短路径搜索算法,可预测EV用户前往目的地的行驶路径。
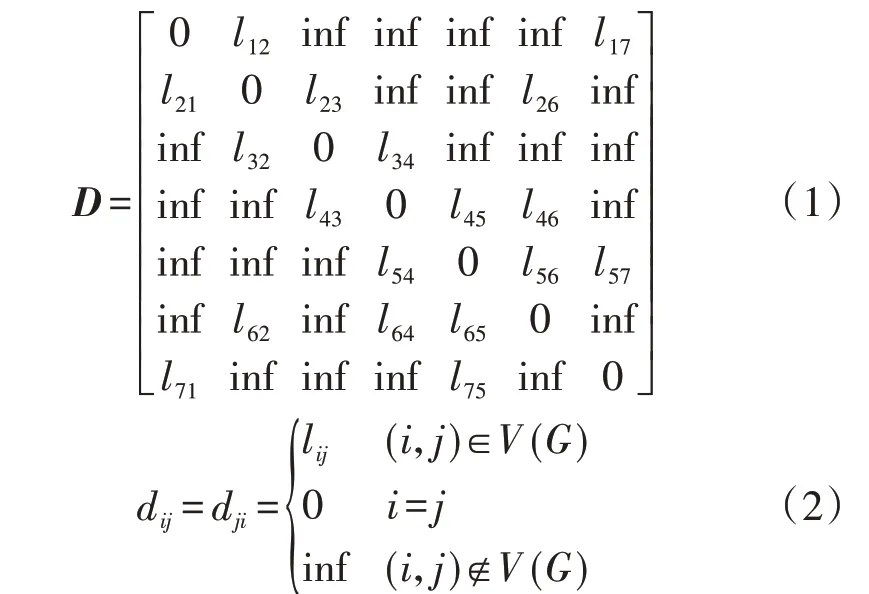
式中:V(G)为路网中的路段集合;lij为路段(i,j)的长度;inf 表示两节点间无连接。
1.2 实时速度-地理数据库模型
在城市路网中,车辆的实际行驶速度受其所处地理环境中的多种因素约束,如当遇到道路堵塞情况时,驾驶人员会更改目标充电站,以期减少路途中的耗时,这将会影响EV 充电需求的时空分布。本文采用实时速度-地理数据库RTS-GID(Real Time Speed-Geographic Information Databas)模型[11],t时刻路段(i,j)上EV的实时速度vreal-time可用式(3)描述。
式中:vmax为该类型EV 的最大行驶速度;δm为连接区域的影响因子,表征路段中存在停车场或十字路口的情况,当路段中不存在连接区域时,δm=1;δn、μc、μl分别为匝道路口、弧形路段、车辆所处的车道位置(即左侧车道、中间车道、右侧车道)对车速的影响系数;vL为路段的限制车速;Gs为路段的坡度;η为实际车流量与路段最大可承载容量的比值;Gi为路段等级;θ′为路段的出口通道数量与行驶通道数量的比值;Rr为曲率半径;f为路段的摩擦系数;γ0—γ6为影响因子;Xn为不同宽度车道的车辆减速因子;Wl、Wl0分别为连通区域与主干道之间路段的设计宽度、实际可用宽度;Ws、Ws0分别为路段的设计宽度、实际可用宽度;r1、r2为缩小比率。
2 风-光-负荷的典型场景构建
风速、光照强度以及常规负荷都具有一定的随机性,本文选取规划地区某一周期内各时刻的风速、光照强度、常规负荷历史数据作为原始样本,并以24 h 为单元划分数据,生成风-光-负荷的日运行场景,并对原始运行场景进行缩减,提取具有代表性的典型运行场景,在保证原始场景分布特征的同时提高模型的计算效率。
K-means 聚类算法能够反映多维数据的场景样本中最本质的“类”的性质,不同的K值以及初始聚类中心得到的聚类结果具有明显的差异,而传统K-means 聚类算法需事先确定聚类数量K以及初始聚类中心,这会在很大程度上影响算法的性能。
本文针对传统K-means 聚类算法存在的不足,采用改进K-means 聚类算法对周期内的风-光-负荷日运行场景进行聚类,将每个场景看作多维数据向量,第i天运行场景的数据向量ξi如式(8)所示,包含日内24 个时刻的风速vt,i(t=1,2,…,24)、光照强度ht,i以及负荷Pt,i数据。

3)确定初始聚类中心后,计算所有样本场景与各聚类中心之间的欧氏距离,将各样本场景与距离最近的聚类中心归为1类。
4)完成聚类后,所有样本场景被分为K类,每一类别中包含若干场景。计算场景中每一维数据的平均值,以此得到新的聚类中心。
5)将新的聚类中心作为初始聚类中心重复步骤3)和步骤4),直至聚类结果不再改变。
6)选取不同的K值,重复步骤1)—5),计算不同K值对应聚类结果的轮廓参数,如式(10)所示。

式中:S为轮廓参数,其值越大,则聚类效果越好;Nξ为样本中的场景数量;b(ξi)为场景ξi与其他不同类别中所有场景的距离均值,反映不同类别之间的分离程度;a(ξi)为场景ξi与同类别中所有场景的距离均值,反映同一类别的凝聚程度。
7)选取轮廓参数S值最大时对应的K值作为最优聚类数量,此时所得聚类中心{ξ1,ξ2,…,ξK}即为K个典型运行场景。
3 EV充电需求预测
3.1 EV类型与电池参数
因电动公交车有固定的行驶路径、充电时间和充电地点,其充电需求的时空分布相对比较固定,所以本文在进行DG 和EV 充电站联合优化配置时主要针对电动出租车、城市功能用车以及电动私家车进行分析。不同类型EV 的充电需求及电池参数分别如附录A表A1和表A2所示。
在规划过程中假设EV 的SOC 服从正态分布N(0.6,0.12)[12],根据不同类型EV的电池容量得到出行时刻的电池电量Ccap,0。行驶途中EV 的剩余电量可根据式(11)计算。

式中:Ccap,t+1、Ccap,t分别为t+1、t时刻EV的剩余电量;dr为[t,t+1)时段内EV 的行驶距离;Δcap为EV 行驶100 km的耗电量。
3.2 城市功能区域划分
城市区域一般按功能定位划分为工作区、居民区和商业区。EV 的出行特性与其所在城市区域有密切联系,电动出租车大多在居民区完成交接班,故其初始位置较大概率在居民区;城市功能用车大多被企业与政府部门在白天用于执行公务,其初始位置在工作区的概率明显高于其他区域;电动私家车主要用于用户上下班,日常往返于居民区和工作区之间,其初始位置主要集中在居民区。
3.3 EV用户初始出行位置与时刻
假设规划区域内有400辆电动出租车、400辆城市功能用车、1100辆电动私家车,依据城市功能区域划分及EV 用户的出行习惯[10],各类型EV 的初始位置见附录A 图A2。本文采用国家公路合作研究项目(NCHRP187)提供的典型工作日不同类型EV的统计数据[13],拟合得到各类EV 在不同时刻的出行概率,如附录A图A3所示。
3.4 基于TransCAD的OD矩阵反推模型
OD 矩阵用于表征路网中所有起点(Origin)到各目的地(Destination)之间的交通出行量,OD 矩阵中的每一行元素表示各起点发生的车流量,每一列元素表示各目的地吸引的车流量。OD 矩阵反推是根据各路段的车流量推算得到EV 的OD 矩阵,可基于交通部门实际监测到的不同类型EV 在各路段的车流量,反推得到对应的OD 矩阵[14],具体如式(12)所示。

式中:M为路段数量;N为路网的节点数量;Tij为从路网节点i到路网节点j的交通出行量;pij_a为从路网节点i到路网节点j的EV 选择路段a作为交通路线的概率;ca为路段a的车流量。
交通规划软件TransCAD 中的OD 矩阵反推程序提供了全有全无(All-or-Nothing)、容量限制(Capacity Restraint)法等交通分配模型,研究者可以根据导入的路网相关地图信息,结合实际情况选择交通分配模型,输入先验OD 矩阵,利用“O-D Matrix Estimation”模块进行OD 矩阵估计。OD 矩阵反推流程如图1所示。
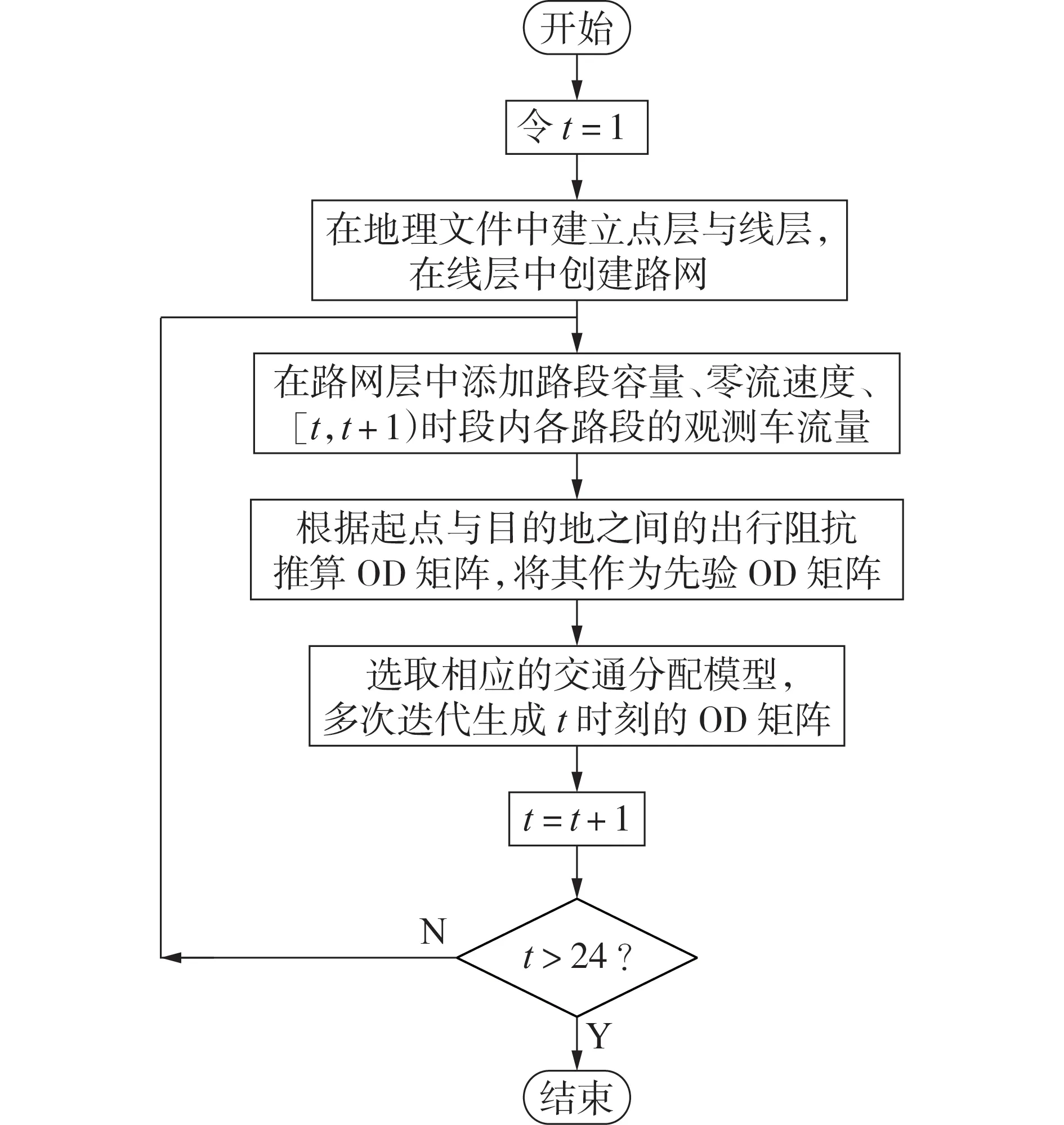
图1 OD矩阵反推流程Fig.1 Inverse deduction flowchart of OD matrix
3.5 出行概率矩阵

3.6 EV充电需求的时空分布
对于电动出租车而言,其主要以运营为目的,大多为倒班交替行驶,定义用户在其SOC 小于充电阈值时会选择充电,考虑出租车用户的里程焦虑约束,设置其充电阈值均匀分布在(0.15,0.30)范围内;对于电动私家车而言,其充电方式可以由用户自主选择,考虑到用户对电池保养的需求,本文假设在产生充电需求且用户已经到达目的地的情况下,选择慢充方式,若在前往目的地的途中产生充电需求则选择快充方式,充电阈值设置为0.1;对于城市功能用车而言,因其在白天处于行驶状态,在夜间处于停驶状态,21:00 之后到达目的地将不再行驶,故其充电阈值一般服从正态分布N(0.4,0.12)。
利用蒙特卡洛方法分别模拟生成电动私家车、电动出租车、城市功能用车的初始运行电量Ccap,0、初始出行时刻tc。对于EVq,根据其初始位置Oi、初始出行时刻,调取tc时刻对应的出行概率及OD 矩阵,利用分层随机抽样法生成EVq的目的地Dj,假设用户选择最短的路径前往目的地,本文采用Floyd最短路径搜索算法得到前往目的地Dj的最短路径集合Rroad,EVq依次通过Rroad中的路段,每经过1 条路段,更新其剩余电量。若t时刻EVq的SOC 低于充电阈值,则记录产生充电需求的EV 信息,包含EV 类型、剩余电量、充电需求产生时刻以及所在位置。其中经过第s条路段时的行驶时间ΔTs如式(14)所示。若t时刻EVq的剩余电量不低于充电阈值电量,则EV会抵达目的地,从初始位置Oi前往目的地途中的总耗时为ΔTji,如式(15)所示。

式中:vs(t)为通过自适应流量-速度模型求得的t时刻第s条路段的EV行驶速度;ds为第s条路段的行驶长度;y为最短路径集合Rroad中的路段数量;Td为经过第s条路段后的时刻。
EVq抵达目的地后,更新其起始出行位置,将目的地Dj作为新的出发点Oj,调用Td时刻对应的出行概率、OD矩阵,EVq前往下一个目的地。依此模拟每一辆EV 在一天中的行驶轨迹,将收集的EV 充电需求时空分布存入矩阵GEV,最终得到24 h的快充需求时空分布,预测流程如图2所示。
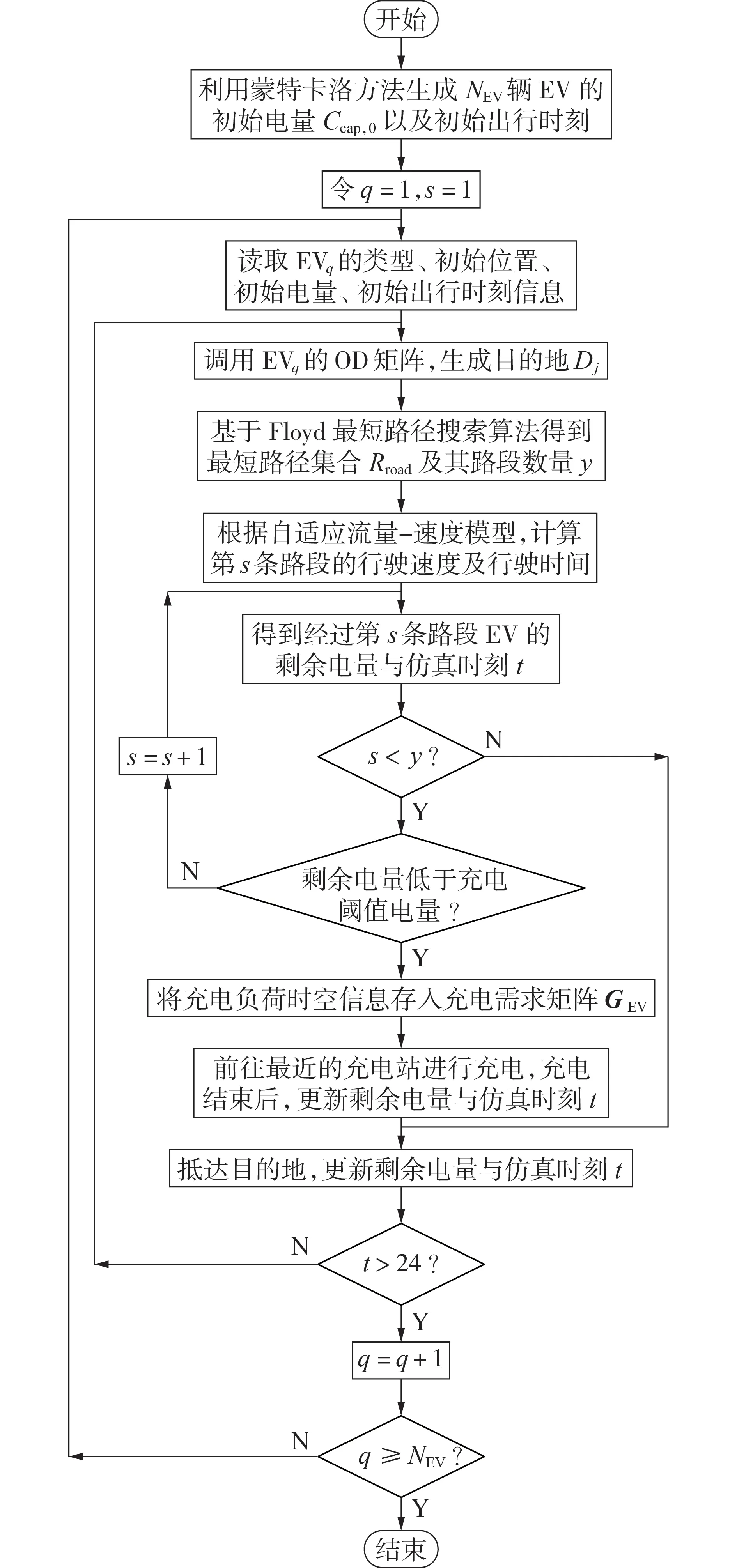
图2 EV时空分布预测流程Fig.2 Flowchart of forcasting EVs’time-space distribution
3.7 基于需求侧的实时电价模型
由于早期的城市规划不能满足居民当前的实际出行需求,容易导致某些路段与交通节点出现密集的EV充电需求,合理地将这些负荷分摊至各座充电站成为研究者需要考虑的问题。为了避免出现局部过负荷问题,本文通过电价波动对用户的充电行为进行引导,t时刻的充电电价p(t)如式(17)所示。


4 考虑时空分布的DG 和EV 充电站的配置模型
4.1 多目标优化配置模型
对DG 和EV 充电站进行优化配置应从电网与用户2个角度确定DG 和EV 充电站的并网位置及安装容量,基于此,本文以综合效益最高、系统负荷波动指标最小、充电耗时成本最少为目标建立联合配置模型。
1)以配电公司的年综合效益最高为目标,即:
式中:F1为配电网的年综合效益;CS为年售电收益;CB为政府对绿色能源发电的奖励补贴;Cinv为DG 及EV 充电站的等年值建设投资成本;COM为DG 和EV充电站的年维护成本;Closs为配电网的网损费用;Nm为典型运行场景数量;dd,m为典型运行场景m对应的天数;co、ci分别为配电公司的售电电价、购电电价;cv为EV单位功率充电成本,包含电费与服务费;Pm,t,L、Pm,t,DWG、Pm,t,PV、Pm,t,EV分别为典型运行场景m下t时刻的负荷需求量、分布式风力发电输出功率、光伏输出功率、EV 充电负荷;cbt,DWG、cbt,PV分别为风电、光伏单位功率政府补贴;nDWG、nPV、nEV分别为分布式风电、光伏、EV 充电站的待选建设节点数量;Pi,DWG为第i个待选建设节点处分布式风电的额定安装容量;Pj,PV为第j个待选建设节点处光伏的额定安装容量;Pk,EV为第k个待选建设节点处EV 充电站的额定安装容量;cfix为EV充电站的固定投资建设成本;ct,DWG、ct,PV、ct,EV分别为分布式风电、光伏、EV充电站的单位容量投资费用;R为贴现率;n1、n2分别为DG、EV 充电站的经济使用年限;com,DWG、com,PV、com,EV分别为分布式风电、光伏、EV 充电站的单位容量运行维护成本;Pi,m,t,WG、Pj,m,t,WG分别为典型运行场景m下t时刻第i个待选建设节点处分布式风电、第j个待选建设节点处光伏的实际发电量;Ik(t)为t时刻支路k的电流;Rk为支路k的电阻;L为支路数量。
2)以系统负荷波动指标最小为目标,即:

式中:F2为系统负荷波动指标值;Pm,t,e为典型运行场景m下t时刻的系统等效负荷;Pm,t,DG为典型运行场景m下t时刻的风光出力之和;Pm,ave为典型运行场景m下系统的平均负荷。
3)以充电耗时成本最少为目标。
假设用户产生充电需求时会根据电价以及前往充电站的耗时选择进行充电的充电站,选择第k个待选建设节点处EV 充电站的概率fEV满足正态分布,如式(26)所示。

式中:ΔTk为EV 到达第k个待选建设节点处EV 充电站消耗的时间;θ、θ1为正态分布的参数,取值均为0.5。当接入第k个待选建设节点处EV 充电站的EV充电负荷大于其设置的配置容量时,新到站的EV将排队等待,直至前一辆EV 完成充电,则用户的充电站耗时包括前往充电站的行驶时间和排队等待时间。则以充电耗时成本最少为目标的表达式为:

式中:F3为充电耗时成本;qt为驾驶者的单位时间成本;GEV为EV 充电站集合;GEVk为会选择第k个待选建设节点处EV充电站作为充电位置的EV充电需求集合;GW为需要排队等待的EV 集合;nW为需要排队等待的EV数量;ΔTW为排队等待时间。
对上述3个目标函数进行归一化处理:




式中:wi为f*i的权重系数。本文基于层次分析法(AHP),结合3个子目标函数的重要性,在AHP 中分别取标度为1、2、1,基于AHP 计算得到w1=0.4,w2=0.2,w3=0.4[15]。
4.2 约束条件
约束条件包括潮流约束、节点电压约束、支路容量约束、单节点接入DG 容量约束、全网接入DG 容量约束、EV 充电站安装容量约束,分别见式(30)—(35)。

4.3 多目标优化配置模型的求解流程
本文基于自适应进化粒子群优化(AEPSO)算法[16]进行多目标优化配置模型的求解,具体步骤如下:
1)构建DG 和EV 充电站的联合配置模型,设置AEPSO算法的参数;
2)读取典型运行场景下的风-光-负荷数据以及EV充电需求时空分布矩阵GEV;
3)初始化改进粒子群优化算法的粒子群,包含DG 容量、EV 充电站的位置以及容量,将各种群代入多目标配置模型中进行求解,记录迭代次数、多目标函数值,同时更新种群;
4)判断是否满足迭代收敛条件,若满足则输出决策方案以及最优定容选址方案,若不满足则重复上述步骤。
5 算例分析
5.1 算例基本参数
本文结合IEEE 33节点配电网系统与29节点路网进行DG 和EV 充电站联合配置的仿真分析,IEEE 33节点配电网系统的拓扑结构如附录A图A4所示,系统参数见文献[17]。29 节点路网在单日不同时段各道路的车流量数据见文献[10]。
系统的最大负荷为3 715+j2 300 kV·A,电压等级为12.6 kV。在对EV 充电负荷进行初步模拟的过程中,配电网系统的节点7、13、21、23、28、31 对应的路网节点附近产生的EV 充电需求较大,且这些节点靠近线路的中后段,考虑就地消纳的原则,尽可能提高系统运行的电压水平,选取节点13、23、31 作为分布式风电的安装候选节点,选取节点7、21、28作为光伏的安装候选节点。单台DG 的额定容量为100 kW,分布式风电的额定风速、切入风速、切出风速分别为13.5、3.0、20.0 m/s,光伏的额定光照强度为1 kW/m2,风电、光伏单位功率政府补贴均为0.2 元/(kW·h),风电、光伏、EV 充电站的单位容量投资费用分别为5381、4375、6000元/kW,EV 充电站固定投资成本cfix=300万元[18],DG的经济使用年限n1=20 a,贴现率R=8%,风电、光伏单位容量运行维护成本分别为0.03、0.01元/(kW·h),EV充电站单位容量年运行维护费用com,EV=100 元/kW,EV 单位千米耗电量为0.215 kW·h/km。实时速度-地理数据库模型中,δn、μc、μl的值分别为0.2、0.3、0.2,r1=0.9,Xn=0.75。驾驶者的单位时间成本为40元/h[19]。
本文选取规划地区全年8 760 h 的风速、光照强度以及负荷历史数据,利用改进K-means 聚类算法生成4种典型运行场景如附录A图A5所示。
5.2 结果分析
利用出行概率矩阵模拟EV 出行轨迹得到EV充电需求平均值为1.358 kW/h,各时刻的充电负荷相较于充电需求平均值的波动率如图3 所示。由图3 可知,清晨EV 充电需求较低,而在13:00—14:00、18:00—19:00 时段出现2 次充电需求高峰,其中13:00—14:00 时段的充电需求空间分布如附录A 图A6(图中道路上的EV 数量表示充电需求量)。由图A6 可知,13:00—14:00 时段的大多数充电需求分布在居民区前往工作区的道路上以及停车场附近。

图3 EV充电负荷波动率Fig.3 Fluctuation rate of EV charging load
EV 充电负荷时空分布结果如图4 所示。由图4可知,充电负荷因时间与空间不同而呈现出完全不同的特性,EV 充电负荷主要集中在居民区与商业区,包含配电网的节点9、11、22、31。在14:00—20:00,商业区处于营业时段,该区域产生了大量的充电负荷,同时商业区也是工作区与居民区的交通要道,结果与实际情况相符。
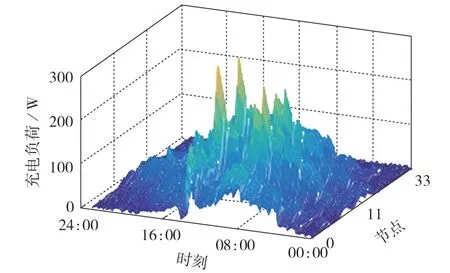
图4 EV充电负荷的时空分布Fig.4 Time-space distribution of EV charging load
EV 用户的出行需求和行驶路径等会影响路网的通畅程度,EV 电池容量及充电行为等会影响配电网的安全与经济运行。反之,配电网的运行状态、潮流分布信息以及路网的拓扑结构同样会影响EV 用户的路径选择和充电决策。配电网和路网相互关联,应将两者融合建模分析以制定合理的充电策略,假设IEEE 33 节点配电网系统为实际城市配电网进行分析,配电网与路网之间的交互模式及部分节点间的对应关系如附录A图A7和表A3所示。
为了验证DG 和EV 充电站联合配置以及需求响应的有效性,构建如下3 种方案进行仿真分析:方案1 假设用户仅选择最近的充电站进行充电,先进行DG 独立配置,在DG 配置方案的基础上进行EV充电站配置;方案2 假设用户仅选择最近的充电站进行充电,并进行DG 和EV 充电站的联合配置;方案3 假设用户会综合考虑充电电价波动与充电消耗里程,进行DG 和EV 充电站的联合配置。3 种方案的优化配置结果如表1 所示。由表可知,当用户充电选择不受电价波动影响时,充电站主要集中于商业区,且某些充电站分布十分密集。方案3 下拟建设EV充电站的空间分布如附录A图A8所示。
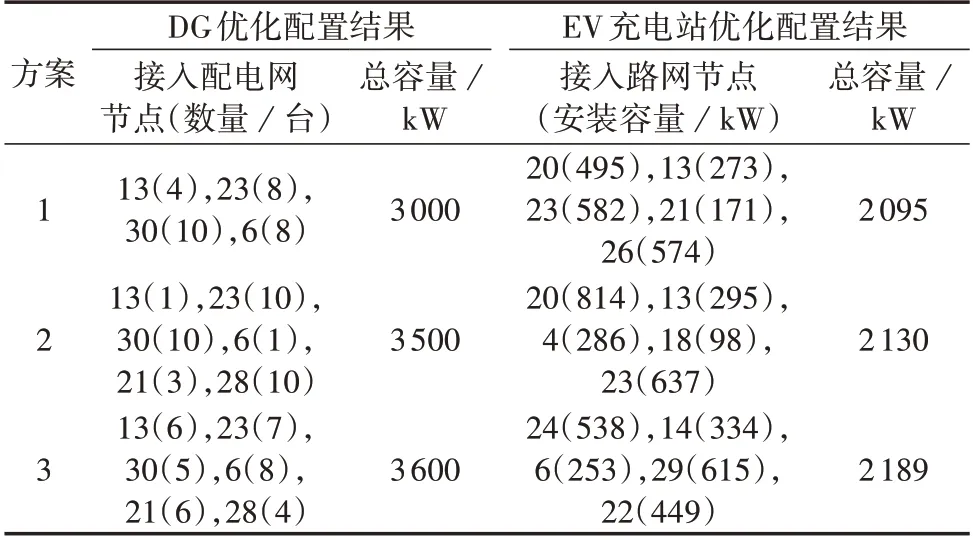
表1 3种方案的优化配置结果Table 1 Optimal allocation results of three schemes
3 种方案下DG 年总消纳量和EV 年总充电负荷结果如表2 所示。由表可知:相较于对EV 充电站或DG进行独立配置,对DG和EV充电站进行联合配置有利于提高清洁能源的消纳水平;同时,EV 的有序充电行为也使配电网能更加有效地利用清洁能源。3种方案的综合评价指标结果如表3所示。
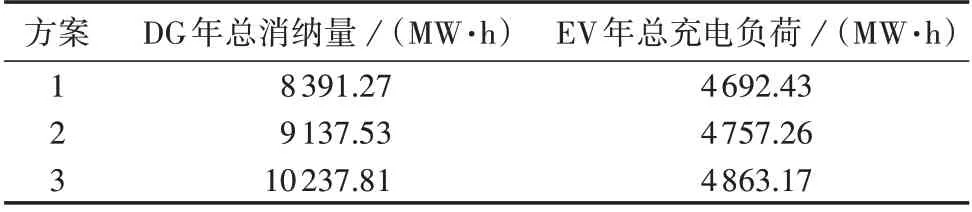
表2 3种方案下DG年总消纳量和EV年总充电负荷结果Table 2 Total annual DG consumption and total annual EV charging load results of three schemes
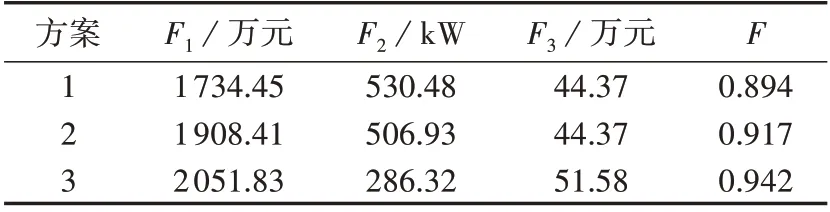
表3 3种方案的综合评价指标结果Table 3 Comprehensive evaluation index results of three schemes
由表3可知,相较于DG 和EV 充电站独立配置,方案3 的年综合效益得到显著提高,而用户在进行充电决策时考虑电价波动的影响可明显降低EV 接入给配电网带来的冲击。方案3 下4 种典型运行场景的节点电压(标幺值)分布见图5。3 种方案下典型运行场景1的节点电压(标幺值)分布曲线见图6。由图6可知,相较于方案1和方案2,方案3的电压质量更理想。

图5 方案3的节点电压分布Fig.5 Node voltage distribution of Scheme 3
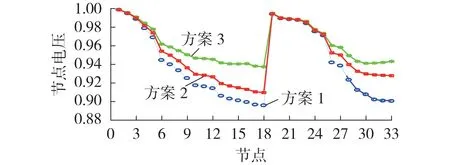
图6 典型运行场景1的节点电压曲线Fig.6 Node voltage curves of typical operation scene 1
当EV充电站数量有富余时,用户的充电耗时成本大幅减少,但会导致配电网的建设投资成本增加,从而使经济性下降。故以方案3 作为前提条件,考虑建设5~10 座EV 充电站,所得综合评价指标结果见表4。

表4 建设不同数量EV充电站时的综合评价指标结果Table 4 Comprehensive evaluation index results with different numbers of EV station
由表4 可知,随着建设EV 充电站数量的增加,系统负荷波动指标结果呈下降趋势,用户的充电耗时成本也随之降低,这是因为EV充电站数量的增多减少了各座充电站的服务范围,提高了用户充电的便利性,而充电负荷的分散接入也使得配电网的负荷波动更加平稳,但建设过多的充电站会使得综合效益指标下降,这是因为在负荷低谷时段部分充电站并没有被有效利用,从而无法获得售电收益。
6 结论
本文提出了一种兼顾时空特性以及需求响应的DG 和EV 充电站多目标联合优化配置方法,结合IEEE 33 节点配电网系统与某城区主干道路网拓扑结构对所提方法进行仿真验证,所得结论如下:
1)EV充电负荷需求高峰与DG的出力高峰高度互补,进行联合配置能有效提高系统对清洁能源的消纳;
2)在国家大力推进信息物理互联网建设的大背景下,模拟EV的空间分布特性,能准确预测EV充电需求的时空分布,同时也能为日后智能交通网与智能电网的联合规划奠定基础;
3)以综合效益最高、系统负荷波动指标最小、充电耗时成本最少为目标进行联合配置,有利于兼顾多方面需求,提高配置方案的综合性能。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
小学生作文·小学低年级适用(2024年4期)2024-05-23 17:59:55
工会博览(2022年5期)2022-06-30 05:30:18
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
环球时报(2020-12-08)2020-12-08 05:17:49
房地产导刊(2020年6期)2020-07-25 01:31:26
建材发展导向(2019年11期)2019-08-24 06:34:56
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29
