
基于无人机和视觉定位的空基GNSS 干扰信号检测方法
2021-11-20 08:26:08李东诚史晓锋罗晓燕
西华大学学报(自然科学版) 2021年6期
李东诚,史晓锋,苏 岳,罗晓燕
(1.北京航空航天大学电子信息工程学院,北京 100083;2.北京航空航天大学宇航学院,北京 100083)
近年来,国内机场民航航班和飞行校验飞机频频遭遇GNSS 干扰,导致飞机GNSS 信号丢失,甚至有部分飞机上的ADS-B 系统发生故障,这严重影响了航空安全,也对基于卫星导航定位的新航行手段造成了巨大威胁[1]。因此,在机场周边等敏感地区实现对GNSS 干扰信号快速精准的检测与定位势在必行。
同时,作为当今导航、定位和授时的核心手段,保护GNSS 正常工作已成为世界各大国重点关注的方向,相应的GNSS 干扰检测与减缓(IDM)系统的研制纷纷开展,如美国初步建成了Patriot Watch[2],欧洲GNSS 理事会组织实施了GNSS PROTECTOR 工程和Galileo MAGIC 计划,并设计完成了JIMS[3]。支撑本文的基金项目正是针对我国GNSS IDM 系统的研究。
在实际的干扰检测中,由于GNSS 干扰信号通常是对空发射,依靠传统的地面测向台站检测GNSS 干扰的方法机动性弱、定位时间长、受地面环境制约大。Bhatti 等[4]提出了采用分布式传感器网络结合到达时间差算法检测定位干扰源,但GNSS 干扰信号在地面传播带来的低信噪比和多径效应仍导致检测定位精度大大降低。采用空基平台时,有人飞机检测GNSS 干扰面临着诸多制约,如可用飞机数量过少、难以低空抵近干扰源进行检测而只能给出粗略的方向性检测结论,所以当前GNSS 干扰检测的研究方向正逐步转为利用无人机等更为灵活的空中平台检测干扰信号。Perkins等[5]提出了一种基于无人机的GPS 干扰源定位方法,证明了利用无人机定位GPS 干扰源的可行性,并为减小GNSS 干扰信号对无人机自身定位的影响,采用了Locata 定位系统提高定位精度,但其过大的重量使得无人机滞空时间大大缩短,且所设计方案仅适用于小范围干扰检测。
为提高干扰检测信噪比,减少多径效应影响,提高干扰检测定位的精度、效率和覆盖范围,本文研究利用无人机检测GNSS 干扰信号和定位干扰源的技术方法;为便于后续工作人员高效准确地找到并排除干扰源,在传统无线电测向定位的基础上,提出了通过无人机实时图像与GIS 地图的数据融合实现对干扰源外形的识别;为确保在复杂地形和非视距条件下无人机的正常通信,设计了无人机与地面数据处理中心的低空通信系统架构。
1 基于无人机的空基GNSS 干扰源定位
1.1 到达角(AOA)定位法
利用无人机对GNSS 干扰源进行单站无源测向定位一般采用AOA 定位法[6],即通过测量目标干扰源到达无人机的信号入射角度来定位干扰源。如图1 所示,无人机上搭载有干扰信号测向设备,通过无人机的运动在不同位置上对干扰源进行观测获得方位信息,即干扰信号到达角,随后利用三角定位的原理,两条以无人机不同位置A、B为起点,到达角为方向的射线必相交于目标信号发射源T的位置。

图1 AOA 定位方法示意图
1.2 带控制输入的无迹卡尔曼滤波
无人机在采用AOA 定位法对干扰源进行定位的过程中不可避免地会引入噪声,造成方位信息误差,进而造成对干扰源定位的误差,并且基于方位信息进行机载单站无源定位在直角坐标系下建立的模型往往是一个非线性模型[7],其系统方程为

式中:Xk为k时刻干扰源与无人机的相对位置向量;uk为k时刻无人机的速度向量;φk为k时刻无人机的方位角和俯仰角;A∈Rn*n、B∈Rn*l为状态向量和控制输入的系数矩阵;wk、vk为零均值高斯白噪声。
因此,本文采用了适用于非线性系统状态估计的带控制输入的无迹卡尔曼滤波方法,构建适当Sigma 点和相应权值,以此估计下一时刻的状态值,并通过优化控制输入,提高定位精度。
1.3 最优机动路径规划
此外,AOA 定位方法的观测量仅有干扰信号到达角,因此为了实现对干扰源的观测和减小观测误差,无人机必须按照一定的路线或方式进行机动。我们采用的无迹卡尔曼滤波是无偏估计方法,而无偏估计量的方差下界,即克拉美-罗下界(CRLB,Cramer-Rao Lower Bound)是最优机动常用的判别标准[8]。对于估计量的均方误差Pk|k,本文以作为优化准则来规划无人机最优机动路径。由统计引理[9]可知,

式中:tr(·)表示矩阵的迹;为协方差矩阵。
1.4 仿真验证
仿真结果如图2 所示,曲线UKF 和UKFOPTIMIZED 分别表示采用无迹卡尔曼滤波和在无迹卡尔曼滤波基础上结合最优机动航迹规划的定位结果。由此可看出所述算法能有效定位干扰源,同时在结合最优机动航迹规划后,曲线更加平滑且更快收敛,证明其稳定性与定位精度有所提高。

图2 UKF 定位仿真测试
2 基于视觉定位的GNSS 干扰源识别
传统的GNSS 干扰检测中,在初步定位干扰源后需要由工作人员使用移动式干扰检测设备进一步检测、排查干扰源,而复杂的实际环境往往导致排查困难,效率低下。无人机进行GNSS 干扰检测时,将会抵近到干扰源附近,因此可以利用无人机搭载的相机获取干扰源附近的图像,将其与GIS 图像配准、融合,从而实现对干扰源的识别,提高排查干扰源的效率。
2.1 干扰源图像的获取和预处理
无人机根据数据处理中心所提供的GNSS 干扰源位置,抵近到干扰源附近,利用无人机搭载的相机拍摄实时图像,并传回数据处理中心。随后将无人机所采集的可能包含干扰源的图像与无人机航迹信息进行时间同步,筛除距离干扰源坐标过远或者是无人机姿态角过大的图像,并根据无人机的姿态信息建立图像几何校正的变换关系,变换后对图像进行重采样和滤波处理。
2.2 干扰源图像与GIS 图像的配准
2.2.1 特征点提取及描述
当前图像配准一般基于图像的局部特征,通过提取图像中的特征点,然后使用相似性度量来进行特征匹配,进而完成图像配准。文中采用的是SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)算法[10]。该算法在图像高斯金字塔上进行特征点的检测,使得算法在图像发生平移、旋转、尺度、光照变化等情况下都有很好的鲁棒性,能够很好地表示图像的特征。
首先构建尺度空间L(x,y,σ):

式中:G(x,y,σ)为高斯核函数;I(x,y)为干扰源图像;(x,y)为图像像素点坐标;σ为尺度因子,表示图像被平滑程度。
利用DOG(Difference of Gaussians,高斯差分)算子检测尺度空间的有效极值点,将其作为特征点,DOG 算子的响应图像为

式中,k为两个相邻尺度间的比例因子。
为了检测不同尺度下的特征点,首先利用高斯平滑和降采样构建共O组L层的高斯金字塔;随后根据高斯金字塔,将每组相邻两层图像依次相减,从而获得DOG 金字塔;最后,根据图像中像素点是否为其邻域中的极值点来决定是否将其保留为特征点。高斯金字塔与DOG 金字塔如图3 所示。

图3 高斯金字塔与DOG 金字塔
在初步获得特征点后,利用D(x,y,σ)的Hessian矩阵计算DOG 空间下图像的曲率,剔除曲率大于阈值,即位于边缘的特征点。
此外,通过DOG 的二阶泰勒展开式确定特征点的位置和尺度,剔除低对比度的特征点:

式中,X=(x,y,σ)T,表示真实极值点与当前极值点间的偏移量。
按照公式(7)、(8)计算特征点邻域内每个像素点梯度的幅值和方向,根据其梯度方向的分布特性来确定该特征点的方向。

选取特征点8*8 邻域并分成4*4 个子区域,计算每个子区域的8 方向梯度,利用直方图进行统计,得到每个子区域的8 维向量,则所有特征向量构成该特征点的128 维描述向量。
由于在机场周边等地进行GNSS 干扰检测时,无人机作业的区域基本固定,因此可以事先使用无人机等方法建立GIS 数据库。在实施图像信息融合时,再调用GIS 库内以干扰源为中心的区域地图信息,类似地选取特征点。
2.2.2 特征点匹配
根据特征点描述向量计算干扰源图像和GIS图像特征上两特征点间的欧氏距离,将其作为干扰源图像和GIS 图像特征点的相似性判定度量:

式中,Ii=(Ii(1),Ii(2),···,Ii(128))和Rj=(Rj(1),Rj(2),···,Rj(128))为干扰源图像和GIS 图像上任意两特征点描述向量。
若两特征点描述向量间的距离d越小,即特征点越接近。对干扰源图像上一特征点Ii,在GIS 图像上寻找其最近邻点Rm和次近邻点Rn,若该特征点与最近邻点距离跟该特征点与次近邻点距离的比值小于设定阈值,那么就将该特征点与最近邻点配对为同名特征点,即

式中,ρ取0.6。
按上述方法逐一比较两图像间的所有特征点并配对。获得特征点匹配结果后,可采用RANSAC(Random Sample Consensus,随机抽样一致)算法,通过采样和验证,不断迭代,去除误匹配对[11]。
2.2.3 图像配准测试
在东营测试基地,我们将无人机航拍图像与GIS 图像进行配准。首先根据SIFT 算法选取特征点并计算特征点描述向量。图4、图5 所示为实地测试中无人机航拍图像和GIS 图像所选取的特征点及其描述向量。

图4 无人机航拍图像特征点

图5 GIS 图像特征点
根据最近邻点/次近邻点比值法判断同名特征点,可得到如图6 所示的无人机航拍图像与GIS 图像特征点匹配结果。
由图6 可看出仍存在一些误匹配的特征点对,因此采用RANSAC 算法进一步筛选,最终获得图7所示结果。

图6 无人机航拍图像与GIS 图像特征点匹配

图7 经RANSAC 算法筛选后的特征点匹配
2.3 基于视觉的目标识别和导航定位
通过干扰源图像与GIS 图像的配准,赋予干扰源图像经纬度信息。根据干扰源坐标,筛选识别出干扰源图像中与干扰源经纬度坐标相同或相近的疑似物体。对所有经过处理的干扰源图像重复上述步骤,统计所有检测出的疑似导航信号干扰源物体出现频率并降序排序,将排序靠前的物体判定为疑似干扰源,存储并显示该结果,同时在GIS 地图中标记出该干扰源及相关信息。
此外,必须考虑的是,无人机通常依靠卫星导航系统来定位并完成航路点飞行[12],但在检测GNSS 干扰信号的过程中,其自身GNSS 信号的接收可能也会受到影响。因此,若所有干扰源图像表示的经纬度范围不包含干扰源坐标,甚至相距甚远,则可以判断无人机卫星导航模块受到干扰。接下来则由干扰源图像、GIS 信息以及相应航迹信息融合来确定当前无人机坐标位置,再结合视觉SLAM 导航或惯性导航引导无人机抵近干扰源位置,重新采集干扰源图像。
3 基于公共网络的低空通信
无人机检测GNSS 干扰的过程中,需要将干扰信号数据和相机图像数据实时传回数据处理中心。而当前无人机的通信系统往往采用点对点通信模式,通常要求无人机与地面控制站之间的阻挡尽量少,并且必须与地面控制站保持在一定通信距离内[13]。
为了实现通信系统一体化设计,并满足无人机飞行数据和任务载荷数据的传输等需求,本文提出了一种如图8 所示的基于公共网络的低空通信系统构架。其中,无人机和数据处理中心上搭载4G 通信模块依靠公共网络进行通信,同时由于在实际作业中,无人机和数据处理中心的IP 地址会发生变动,无法直接通信,因此采用了固定IP 的云服务器进行通信中转和数据存储。该通信方案已在东营胜利机场进行实地测试并成功验证可行性,后续可进一步采用5G 通信以获得更高通信带宽。
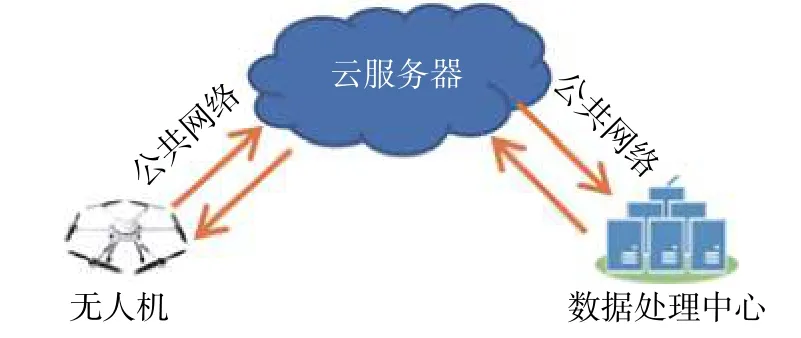
图8 基于公共网络的低空通信
其优势在于以下几个方面。
1)搭建成本低,使用方便。检测GNSS 干扰信号需要无人机在低空作业,因此在通过公共网络进行通信时不需要对现有通信基站进行额外改装便能直接使用。
2)保障数据高速稳定传输,减少地面控制站对无人机的限制。当前4G 所部署的LTE-TDD 和LTE-FDD 在理论上分别能够达到100 Mbps 和150 Mbps 的带宽[14],以及具有更高带宽的5G,能够确保无人机数据能够及时准确地传输到地面处理中心,并且基本不受建筑等遮挡环境对通信的影响。
3)实现对设备和数据的统一监管。无人机和地面数据中心的通信需要使用具有公网IP 的云服务器作为中转来传输数据。这既是必要的,也使得我们可以利用云服务器来统一监管、存储所有数据。
此外,在云服务器上保留检测数据,可进行大数据分析深入研究GNSS 干扰,同时也为未来建立多地乃至全国范围内飞行校验数据互联互通云平台提供了数据支持。
4 结论
本文介绍了利用无人机结合无迹卡尔曼滤波以提高干扰源定位精度和优化机动路径的方法,借助无人机视觉识别干扰源外形以提高干扰源排查效率的方案,以及基于公共网络的无人机与数据中心间的低空通信架构,为无人机检测GNSS 干扰信号提供了新的技术手段。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28 07:02:46
电气技术(2021年3期)2021-03-26 02:46:08
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19 08:28:36
通信电源技术(2020年22期)2020-03-27 06:48:02
电子制作(2017年10期)2017-04-18 07:22:42
电信科学(2016年9期)2016-06-15 20:27:25
中国交通信息化(2016年5期)2016-06-06 03:51:45
现代工业经济和信息化(2016年8期)2016-05-17 05:37:35
高中生学习·高三版(2016年9期)2016-05-14 09:12:05
工业设计(2016年6期)2016-04-17 06:42:54
