
北斗GNSS在宋农水电站的应用
2021-11-18 07:16:52阮焕江
黄河水利职业技术学院学报 2021年4期
阮焕江
(长江水利委员会长江科学院重庆分院,中国 重庆 400026)
0 引言
北斗卫星导航系统是我国自主建设运行的全球卫星导航系统。该系统于20世纪后期开始建设,2020年基本建成,目前已在测绘、电信、水利、渔业、交通运输、森林防火、减灾救灾和公共安全等领域得到广泛应用。安全监测是大坝管理的耳目,是判断水库能否安全运作、充分发挥效益的必要手段。本文试以宋农水电站为典型案例,探讨北斗GNSS在坝体表面变形监测中的应用。
1 工程概况
宋农水电站位于重庆市秀山县宋农镇梅江河干流双溶滩峡谷区,是梅江河干流上规划的第十一梯级电站,上游为热水塘电站,下游为三角滩电站。该电站是一座以发电为主的水利枢纽工程,主要由拦河坝(溢流与非溢流)、引水道、电站厂房、冲沙孔及排沙廊道等构成。拦河坝坝顶长为214.50m,分13个坝段,坝顶高程为290.40m,宽为5~14m,最大坝高为27.40m,最大坝基宽为24.00m,溢流坝设在河床中部和左岸。电站主厂房布置在河床右侧,为坝后式,尺寸为43.47m×14m×2864m(长×宽×高),装机3台,总容量为12MW,多年平均发电量为0.58 亿kW·h,副厂房布置在主厂房与右岸坡之间。坝址以上流域集雨面积为2752km2,水库总库容为2674万m3,正常蓄水位为288.20m,50年一遇设计洪水位为288.23m,500年一遇校核洪水位为290.22m。
根据 《水利水电工程等级划分洪水标准》(SL252-2017)的规定,本工程为Ⅲ等中型工程,由挡水建筑物、泄水建筑物、冲沙孔、引水系统和厂房等建筑物组成,主要建筑物为3级,次要建筑物为4级,临时建筑物级别为5级。
2 北斗GNSS的组成、优势及工作原理
2.1 北斗GNSS的组成
目前,北斗GNSS在线监测系统主要由传感器系统、数据传输系统、数据处理与分析系统和辅助系统4部分组成[1]。传感器系统主要由布置在稳定基岩的基准点和发生变形部位的测点上的扼流圈天线及GNSS接收机组成。数据传输系统主要由布置在基准点和测点机柜里面的GPRS无线通讯模块构成。数据处理与分析系统主要由布置在监控中心计算机里的GAMIT/GLOBK程序构成。辅助系统主要由布置在基准点和测点处的供电系统和避雷系统等组成。
2.2 GNSS的优势
相较于传统的水准测量法测垂直位移、视准线法测水平位移等表面变形测量手段,北斗GNSS在线监测具有以下优势[2]:(1)各测点之间无需满足通视条件;(2)可同时测出三维位移;(3)不受气候等外界条件影响,可实现全天候观测;(4)可反映大坝整体变形情况;(5)可实现自动化监测。
2.3 GNSS的工作原理
利用GNSS进行定位,就是将卫星视为“动态”的控制点,在已知其瞬时坐标(可根据卫星轨道参数计算)的条件下,以卫星和用户接收机天线之间的距离(或距离差)为观测量,进行空间距离后方交会,从而确定用户接收机天线所处的位置,其计算原理如式(1)所示[3]。

式中:i为卫星的索引号,i=1,2,3,4,…,n;Pi为各点到第i颗卫星的伪距;xisv、yisv、zisv为第i颗卫星的位置;δtue为用户钟差;xue、yue、zue为用户的位置。
3 GNSS点布设及参考坐标选择
3.1 GNSS点布设原则
3.1.1 基准点布设原则
根据《全球定位系统(GPS)测量规范》(GB/T18314-2009)的要求,GNSS基准点布设应遵循以下原则[4]:(1)场地稳固,年平均下沉和位移应小于3 mm;(2)视野开阔,视场内障碍物的高度不宜超过15°;(3)远离大功率无线电发射源(如电视台、电台、微波站等),其距离不得小于200m,远离高压输电线和微波无线电传送通道,其距离不得小于50m;(4)尽量靠近数据传输网络;(5)观测标志应远离震动源。
3.1.2 监测点布设原则
根据《混凝土坝安全监测技术规范》(SL601-2013)要求,GNSS监测点布设应遵循以下原则[5]:(1)避开高大的建筑物;(2)选择能够代表水库大坝位移变形的部位。
3.2 GNSS点的布设
3.2.1 基准点布设
依据现场环境情况初步筛查后,厂区大门指示牌处及厂区旧宿舍附近都具备布设基准点的条件,利用GNSS便携移动站进行现场实测,实测结果如表1所示。

表1 基准点卫星数统计表Tab.1Statistic of base-point satellites
综合考虑工况环境、设备安防及卫星质量,实测结果显示,厂区旧宿舍附近卫星数量最多且位置精度因子(PDOP)值最优,所以选定在电站旧宿舍附近设置基准点,编号为LS1。
3.2.2 监测点布设
根据宋农水电站安全监测坝体表面变形监测需要,初步确定在坝顶布设4个监测点,利用GNSS便携移动站进行现场实测,结果如表2所示。
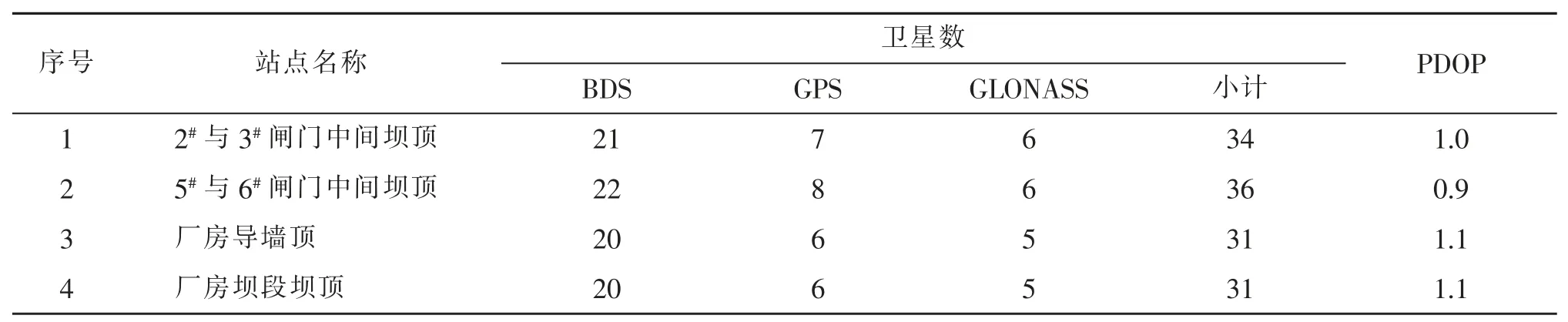
表2 监测点卫星数统计表Tab.2Statistic of monitoring-point satellites
由表2可以看出,4个监测点卫星数量、位置精度因子(PDOP)值都满足布点要求,因此,最终确定在2#闸门与3#闸门中间坝顶、5#闸门与6#闸门中间坝顶、厂房导墙顶、厂房坝段坝顶分别设置监测点,编号为BM1、BM2、BM3、BM4。
3.3 GNSS参考坐标
本项目各监测点的参考坐标为初始运行期间积累的观测值经精密后处理后得到的平均值,其精度约为±1mm。
4 GNSS监测精度评估
4.1 GNSS监测精度评估方法
监测精度评估分为内符合精度和外符合精度两种,本文主要进行内符合精度评估,具体操作步骤为:(1)计算监测点每天的解算结果,将其转换成北东高本地坐标下,并计算其与参考值的差值;(2)统计评估时段内南北、东西、高程方向分量差值的RMS值(σ);(3)按式(2)和式(3)计算平面精度和高程精度。

式中:H为平面精度;V为高程精度;σE为南北方向差值的RMS值;σN为东西方向差值的RMS值;σU为高程方向差值的RMS值。
4.2 监测精度评估
本项目共4个监测点,分别为BM1~BM4。经安装调试,北斗变形监测系统已于2020年12月5日正式运行。本文分析整理2020年12月5日~13日共8d的观测数据,经精细处理,得到各个监测点8 h解算周期的位移监测成果(如表3所示)。
表3所示的统计结果高程RMS略比平面差,主要是计算的初始值存在系统性偏差。图1为各测点变形监测时间序列。由图1可知,平面和高程的标准差均优于0.2mm。
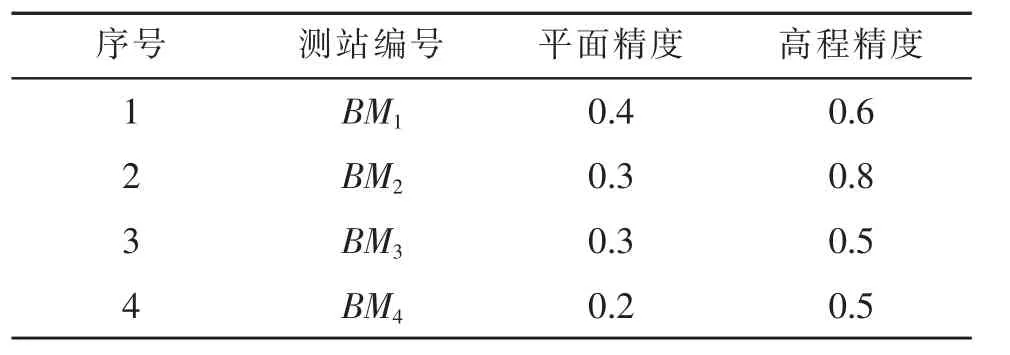
表38 h监测精度表Tab.3Monitoring accuracy of8h
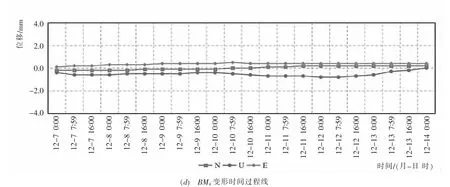
图1 测点变形监测时间序列图Fig.1 Time series diagram of deformation monitoring of measuring-point

综上所述,本次实测的8h时段北斗数据解算精度平面优于1mm,高程优于2mm。
5 结语
北斗GNSS在宋农水电站安全监测坝体表面变形监测中的应用表明,北斗GNSS接收卫星数量较以前GPS、GNSS有大幅度的提升,精度也有明显提高,表面变形监测可以达到mm级精度,能够满足大坝监测的需要,并且它还可以实现全天候自动化监测。随着北斗系统的不断完善,使用成本的不断降低,北斗GNSS在水库大坝安全监测中将发挥更加重要的作用。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
煤气与热力(2022年4期)2022-05-23 12:44:56
华中建筑(2022年4期)2022-04-14 07:50:52
水利水电科技进展(2021年6期)2022-01-07 02:58:02
现代测绘(2021年1期)2021-04-28 10:19:56
水电站设计(2020年4期)2020-07-16 08:23:48
当代陕西(2019年18期)2019-10-17 01:48:50
太空探索(2016年3期)2016-07-12 09:58:47
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
