数字图像低频成分轮廓丢失边缘保留仿真
2021-11-17 08:37宋野
计算机仿真 2021年5期
宋 野
(长春工业大学人文信息学院,吉林 长春 130122)
1 引言
数字图像信息量繁多,结构多样化,在表达、储存、传输过程中会由于一些特殊环境影响,导致图像低频成分轮廓边缘丢失,若这种情况下丢失的面积较大,难以用去噪的方法保留图像边缘,随着专业人员的不断探索,研究出大量的轮廓丢失边缘保留方法。针对数字图像而言,边缘是由一系列的边缘点构成,数字图像的低频成分为图像中灰度值变化缓慢的区域。
传统的数字图像低频成分通过自适应形态学、代价函数最小化、智能布线法等,保留成分轮廓丢失边缘,然而,这些方法产生大量参数,并且这些参数的制定与具体图像有关,不便于实际操作应用。传统方法利用代价最小化算法保留丢失的边缘[1],此方法把图像融入到边缘保留中,使图像边缘得到恢复,实验结果证明了该方法的有效性。但这种算法利用代价函数还不能够准确提取图像的特征,同时若丢失边缘位于目标轮廓边角处时,传统的算法无法保留目标轮廓的边缘信息,导致轮廓提取结果与图像的初始形状会出现不一致。传统方法在主动轮廓模型(Snake)的基础上[2],提出了GVF Snake模型[3],利用变分与偏微分算法把新的外立场梯度向量场(Gradient Vector Flow,GVF)转入到Snake模型中,经典Snake模型能够提取边缘轮廓的目标,目前已有大量针对Snake模型改进的算法,Snake模型主要是通过轮廓线来接近目标的真实轮廓,能够保留丢失边缘,解决了对目标轮廓的提取,但是,传统的主动轮廓模型不能够完全保留图像轮廓边缘处的信息。
针对上述问题,基于GVF Snake模型,将变分与微分算法转入到丢失边缘保留问题中,对此提出一种新的边角保留能量模型[4],用于改进GVF外立场无法完全保留轮廓边缘信息的问题。将该模型极小化后,又重新得到了一种边角保留GVF(CP-GVF)外立场[5],它将边缘附近的梯度向量扩散到丢失边缘处,保留了目标轮廓的初始信息以及丢失点位置边缘方向,实现数字图像低频成分轮廓丢失边缘保留的目的。最后,由仿真对比图像可以看出,本文方法相对于其它方法更加具有实用性和准确性。
2 图像边缘特征向量提取
边缘检测算法的核心是传入图像的像素点信息,根据映射法判断出表征像素点是否为边缘,利用某像素点的邻域灰度分布和图像特征向量的不同,将图像分为边缘像素点与背景像素点[6]。
图像的边缘实际上是图像中灰度突变的点,同时灰度分布有序,具有方向性。采用图像边缘灰度特性与噪声差异来提取特征向量,建立相匹配的特征向量,能够在检测图像边缘的同时又具有较强的识别效果。
图像边缘特征向量的提取分为三个阶段:第一阶段是梯度特征分量提取[7],它不仅是反映变化速度的有效途径,而且是检测边缘的主要依据之一,在建立像素点灰度值的梯度分量时,结合了Robert算法,能够在最短时间内实现边缘特征向量的提取,在图像中边缘附近梯度值越大,缓冲区梯度值越小,所以能够较好的显示出图像边缘信息;第二阶段是中值特征分量提取[8],因为图像边缘带有特殊的结构性,所以位于边缘方向上的中值特征向量相当于当前像素点的灰度,由于该点是单独的灰度突变,在取中值处理中被自动消除,所以在进行特征向量提取时,缩短了操作时间,具有较高的时效性;第三阶段是方向特征向量的提取,通过Kirsch方向算子[9],实现消除噪声影响的目的,Kirsch算子将8种模块分别与测试像素点位3×3的领域进行卷积,中心点像素是由最大传出值与最小传出值相减得来,当邻域内有中心点边缘并且具有方向性,则模板测试的位置与边缘方向越接近时差值越大,当该位置与边缘方向距离最远时差值越小。
但当邻域的灰度突变由噪声引起时且不具有方向性,卷积值都相近,差值达到最小,因此对于噪声的干扰,具有较强的消除效果。
因为BP神经网络具有多层化[10],所以可用来解决复杂的非线性问题。首先,要收集一些具有代表性的图像作为检测样本,提取该图像的真实边缘当作主导信号,然后建立BP神经网络,采用准确的边缘信息当作网络训练的传入样品,最后用BP算法对神经网络进行训练,通过不断的训练,图像的灰度信息以及边缘检测传出数据被记忆于网络的权值、阈值与框架中,能够让BP神经网络有效识别图像边缘像素点的特征。
然而,隐层神经元数量的选取是一件非常困难的事情,需要经过大量的实验结果综合考虑来确定,与传入、传出神经元数目有一定的关系,若数量过大会导致训练时间变长,结果不准确,不能识别新样品,对此,提出了一种可进行模式识别及分类的BP神经网络隐层节点数目[11]。图像边缘特征向量提取函数如式(1)所示

(1)
式中,np代表传入节点数量,nr代表传出节点数量,a代表常数,使用先少后多的训练办法,慢慢增加隐层单元数量,直到达到最好效果为止。边缘检测时,采用slide方法,即对每个像素点进行逐一处理。
3 数字图像低频成分轮廓丢失边缘保留
3.1 丢失边缘标注
在对丢失边缘进行标注前,首先要对图像进行形态学细化处理,然后对丢失边缘进行标记,观察每一个图像中的边缘像素点,若图像中仅有一个8邻域点,则对其标注为丢失点,将初始传入图像记为fο,形态学细化后的图像记为f,标记后的丢失边缘图像记为fc,如图1所示。
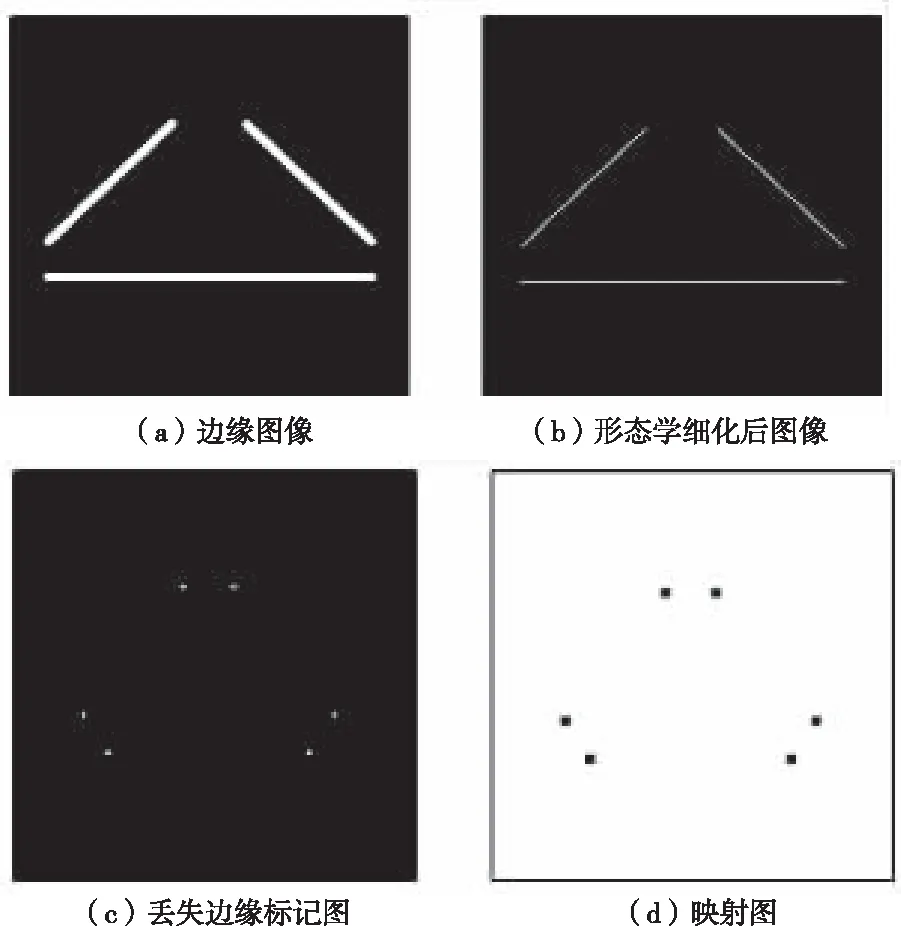
图1 标记丢失边缘过程图
3.2 低频成分轮廓丢失边缘保留
GVF外立场实际上是一种向量场,它是将能量泛函数转变成最小化得来,GVF场是拓展的梯度向量场。但是,如果当数字图像中的低频成分轮廓过于模糊,会导致轮廓处的边缘提取结果发生丢失,从而在丢失边缘处GVF场中的梯度向量都转向了丢失点。对此,首先要对图像中丢失边缘处的最初梯度场与GVF场的特点进行分析,为了保留丢失边缘提出如下能量模型
Ecp=n∬μ|∇v|2
+|W(x,y)·∇f|2|V-W(x,y)·∇f|2dxdy
(2)
式中,W代表丢失点的对应图,v(x,y)=[u(x,y),υ(x,y)]代表新的向量场,被叫做边缘保留GVF(Corner Preserving GVF,CP-GVF)场,∇f代表低频边缘图像f的梯度图像,μ代表加权参数,该能量函数中包含两种,第一种μ|∇v|2表示向量场V在坐标(x,y)中的转变,V的变化越小就会构成一种缓变的向量场;第2种|W(x,y)·∇f|2|V-W(x,y)·∇f|2代表V与W(x,y)·∇f的差异度,差异度越小V和W(x,y)·∇f越接近。所以GVF场是拓展的梯度向量场。
通过GVF向量场的处理方式,然后结合极小化式(2),能够计算出CP-GVF场的Euler方程,如式(3)、式(4)所示
μΔu(x,y)-[u(x,y)-W(x,y)·fx(x,y)]·
|W(x,y)·∇f|2=0
μΔυ(x,y)-[υ(x,y)-W(x,y)·fy(x,y)]·
|W(x,y)·∇f|2=0
(3)
|W(x,y)·∇f|2=

(4)
式中,∇代表Laplace算子,偏微分用fx和fy来表示。把与当作按时间变化的函数如下
u=u(x,y,t)
υ=υ(x,y,t)
(5)
因为W(x,y)·fx(x,y)与W(x,y)·fy(x,y)都是标量积,以上方程的求解方法与GVF模型相像,需将fx(x,y)和fy(x,y)分别与W(x,y)相乘。
为了完成W数值,需将图像中的像素点i和j代替坐标系中的x与y,这样才能使W(x,y)=W(i,j),W的主要负责控制丢失点处的最初梯度场,可通过形态学膨胀技术来完成W,首先要对丢失点标记图像f施行形态学膨胀,求出的丢失边缘图像fcx如式(6)所示
fcx=fc⊕SEcllipse
(6)
式中,SEcllipse代表图像结构元素,主要负责遮挡丢失边缘周边的其它点,尺寸的选择成为该方法实现的关键,太小会影响丢失点周边向量的控制,太大会减少非丢失边缘附近的向量场,通常情况下会将SEcllipse的尺寸设为2。随着丢失边缘的范围不断增大,会形成一个连通区域,低频成分轮廓丢失边缘保留函数由下式得来
W(i,j)=1-λ·fcx(i,j)
(7)
式中,λ表示抑制因子,能够显示丢失边缘附近向量场的抑制系数,该系数是位于0~1之间的一种权重因子,通常取值为0.9可以抑制丢失边缘的增大。W如图1(d)所示。
W(x,y)·∇f的值只在非丢失边缘周围才会增大,所以由第二项控制,当时取最小值,但在其它范围W(x,y)·∇fV(x,y)=W(x,y)·∇f较小,此时由第一项控制。最终的目的是:非丢失边缘区域的梯度向量被分散到丢失边缘区域,由此使目标轮廓处的边缘信息得到保留。
GVF外立场与CP-GVF外立场的对比图如图2、图3所示。
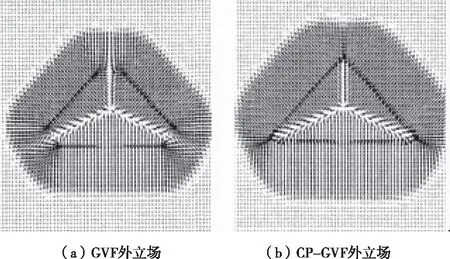
图2 GVF与CP-GVF外立场的对比图
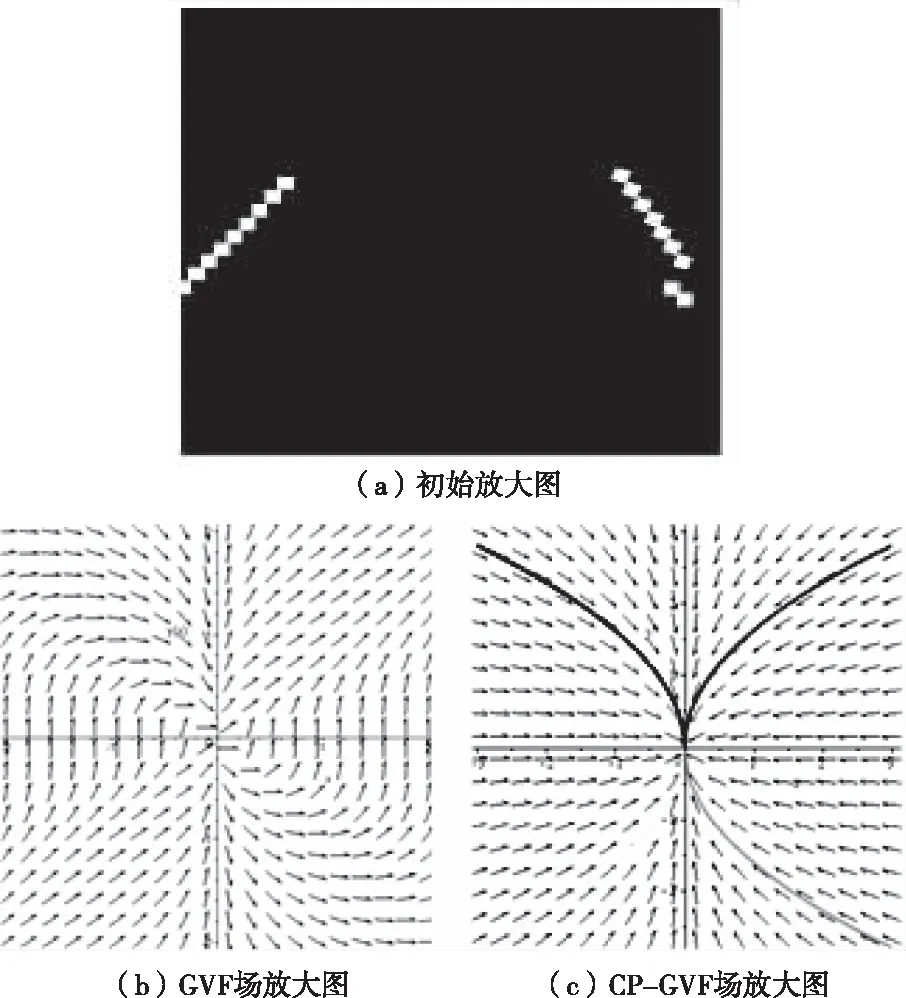
图3 GVF外立场和CP-GVF外立场
在图3(a)中,图像的顶角边缘丢失,该丢失边缘图相对应的GVF外力场如图3(b)所示,向量都被扩散到了丢失边缘区域,而在CP-GVF中丢失边缘区域的向量保持了原边缘的向量走势,使得丢失边缘得到保留。
4 仿真结果与实验分析
4.1 丢失边缘保留效果分析
为了更好的检验本文方法对丢失边缘保留效果,收集了几种不同的图像进行实验测试,轮廓的形状与丢失边缘点位也各不相同。
首先把图像进行灰度化,然后在进行边缘提取,该实验采用的系统为Matlab R2011,将μ取值为0.2,λ取值为0.9,把实验后的结果与GVF Snake方法做对比分析,如图4所示。
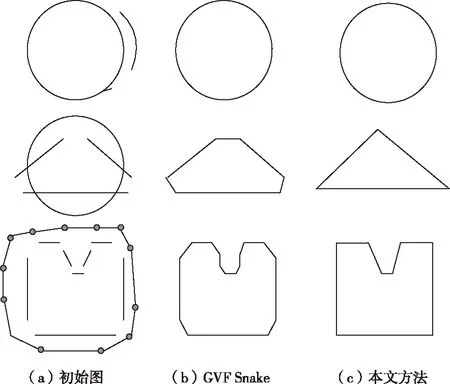
图4 对比分析图
这两种方法都能够很好的保留圆形丢失边缘图像轮廓,对于丢失边缘轮廓为三角形的图像,经过GVF Snake方法处理后,丢失边缘图像没有被完全保留,但本文方法则能够完好的保留三角形的轮廓,恢复到初始形状。图4(c)原始图为规则的多边形轮廓图,GVF Snake方法仍然不能够保留边缘的原始信息,为了仿真图像边缘轮廓的丢失,图4(a)中抹去了一些边缘轮廓,GVF Snake方法直接将丢失边缘处进行连接,丢失了一部分的边缘信息,没有将其完全保留下来,但本文方法能够完整的保留图像轮廓的边缘信息,该实验采用的图像真实边缘尺寸为128×128,实验结果显示,图像中丢失边缘间的尺寸在30个像素点以内,都能够完成丢失边缘的保留。
4.2 准确性分析
为了进一步检验低频成分轮廓丢失边缘保留的准确性,将图片进行模糊化处理,然后在对模糊后的边缘图像进行检测,同样采用GVF Snake方法进行对比分析。
从图5中可以看出,目标轮廓的边缘位置已经变的很模糊,通过边缘检测后,该位置的轮廓边缘会有部分丢失,所以利用GVF Snake对目标轮廓进行提取的结果还不够完善。然而通过CP-GVF外立场的作用能够让丢失边缘信息得到复原,从而证明了利用本文提出的方法能够实现目标轮廓的边缘信息保留,并且具有较高的准确性。同时,在图5的后两行图像中,凹陷处边缘变得模糊,这些轮廓虽都是由形状规则的矩形方框摞在一起形成,但由于雨水、光照等特殊原因导致低频成分部分边缘变的非常模糊,经过两种方法的对比,如图5(b)和(c)所示,GVF Snake方法处理后的图像轮廓仍有一部分边缘丢失,而本文的方法使得图像轮廓的边缘得以完整的保留。
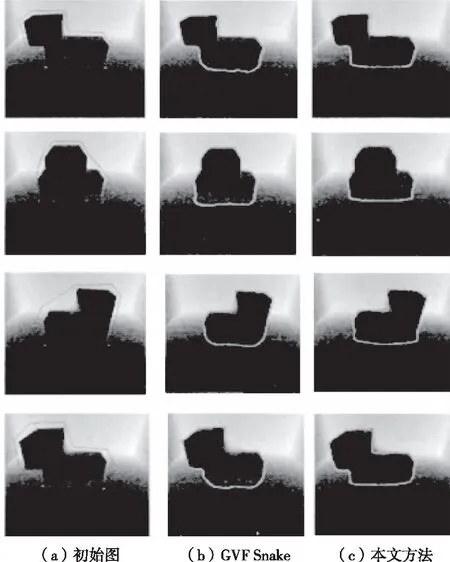
图5 准确性对比分析图
5 结论
本文为了有效保留数字图像低频成分轮廓丢失边缘,首先对图像边缘进行检测,通过特征向量对图像进行特征提取的方式来减小像素点灰度传入时的传入范围,具有较强的时效性,然后提出了一种新的能量模型即边缘保留能量模型,极小化后得到了CP-GVF,实现了当目标轮廓边缘丢失时能够得到完整保留,实验结果证明了该算法的准确性。
猜你喜欢
保定学院学报(2022年2期)2022-04-07
中学生理科应试(2021年11期)2021-12-09
现代电子技术(2021年1期)2021-01-17
数学学习与研究(2018年15期)2018-11-12
现代电子技术(2018年18期)2018-09-12
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
美与时代·美术学刊(2016年8期)2016-11-09
科教导刊·电子版(2016年1期)2016-03-14
科技视界(2016年3期)2016-02-26