民用飞机一发失效离场航迹仿真计算关键方法
2021-11-17 08:37齐永强赵延毫
计算机仿真 2021年6期
王 可,齐永强,赵延毫
(中国民航飞行学院,四川 广汉 618307)
1 引言
离场性能分析在众多性能分析工作中具有至关重要的作用。根据中国民航局于2000年颁布的AC-FS-2000-2《关于制作起飞一发失效应急程序的通知》和2015年颁布的AC-121-FS-2014-123《飞机起飞一发失效应急程序和一发失效复飞应急程序制作规范》的相关规定,在某些地形复杂机场,需要为飞机制作起飞一发失效应急程序。运输类飞机一台发动机失效(简称一发失效)后的离场性能分析,是民用运输机运行性能分析工作中的关键点,对于确保飞机的起飞安全具有重要作用[1]。航空运营人在设计起飞一发失效应急离场程序(Engine out standard instrument departure,简称EOSID)时,需获得飞机在起飞中一发失效后离场的空间运动轨迹。因该运动轨迹需基于机型自身的性能要求,并符合适航及运行规章要求,故需要通过仿真计算引入规章约束、障碍物约束、离场条件约束,才能分析和制定出安全的应急逃离路线。
文献[2]提出基于PEP的起飞一发失效应急程序研究,依据PEP软件对所需参数进行设定,以内置真实数据库为基准,可确定起飞一发失效程序是否可行。但该方法准确性较差。文献[3]提出基于飞行性能和数字地形的应急程序航迹自动规划方法,使用制造商提供的飞机性能参数和直线离场航迹,搜索满足条件的可用飞行航迹,利用PRM算法和Dijkstra算法对航迹进行规划。该方法能满足性能和地形的要求,但转弯路径航迹规划较差。文献[4]方法对高原机场飞机转弯过程及侧净空进行了分析。建立转弯性能计算模型,分析不同气压高度下飞机转弯所需航线宽度的变化规律,并建立飞机全发及一发失效情况下转弯所需航线宽度与气压高度的关系。使高原机场内水平面范围增加。但该方法在直线航迹规划不全面。
因此本文对民用飞机EOSID航迹性能分析仿真计算的关键方法进行了研究,对其进行了工程实现,并给出了实际算例结果。根据仿真对比实验,证明所提方法计算误差小,适用飞行范围广泛,实用性强。
2 EOSID航迹性能仿真计算
2.1 适用场合
由于飞机在起飞过程中出现一发失效后推力减小和阻力增加,导致爬升能力和越障能力降低。需要通过性能分析选择合理逃离路线或对飞机进行减载来保障安全[5]。因此,在特定的机场运行时,航空运营人基于经济性和安全性的双重考虑,倾向于挑选飞机在可选构型及日常环境条件下被规章许可的最大起飞重量来进行EOSID航迹设计。该过程需结合地图作业筛查位于飞机飞行轨迹保护区范围内的障碍物,将其与航迹进行对比,来完成垂直剖面内和水平剖面内的越障检查。
在设计离场性能分析工具的过程中,实现满足飞机性能限制(空气动力限制和发动机限制)的构型约束和运动约束的计算较容易,难点在于对轨迹约束的实现。这是因为轨迹约束的实现并非简单利用空间几何约束条件预先给出飞机运动轨迹之后再进行相应的运动计算,而是在运动计算的每一个时间步长下,对飞机是否满足轨迹约束条件(垂直轨迹和水平轨迹)进行判断,确定下一个时间步长计算的已知条件。
首先,对飞机起飞离场时在垂直剖面内和水平剖面内的航迹进行定义。如图1,定义内容包括:环境条件、起飞重量、起飞速度、发动机失效时机、构型转换时机、推力转换时机、速度限制要求、高度限制要求以及机动时机、机动方式等。其次,根据定义的内容计算出相应EOSID飞行轨迹以及对应的保护区范围,如图2。其中seg为子航段、splay area为保护区。将其与障碍物A型图和机场地形图相结合,确定需要计入并加以考虑的障碍物数量、位置和高度。结合这些障碍物信息检查飞机能否安全越障。
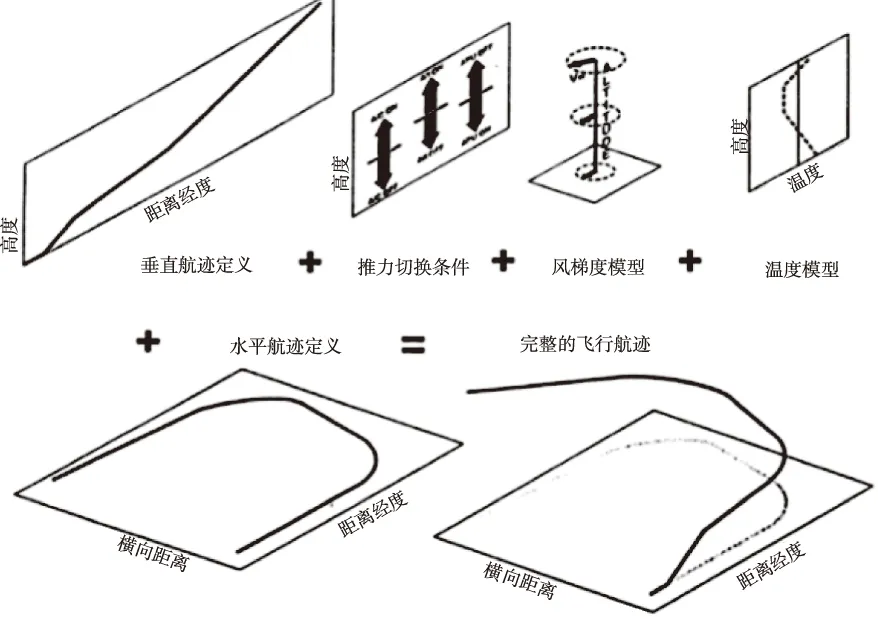
图1 EOSID离场航迹定义图
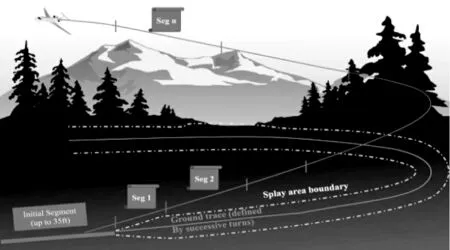
图2 EOSID航迹性能分析示意图
最后,一旦越障条件不能满足,则需重新调整重量、垂直或水平轨迹定义条件,再次获得新的飞行轨迹和保护区范围。选定新的障碍物继续进行越障检查。多次重复这一过程,直至飞机成功避让障碍物并达到性能优化的目的。航空运营人正是基于EOSID性能分析工具才能高效和便捷地完成上述工作。
2.2 核心问题
EOSID航迹性能仿真计算的核心内容,是用户依据性能分析工具所提供的策略手段,对航迹条件和约束条件进行有效定义。性能分析工具对这些条件进行解释和判断,再结合具体的机型数据、环境数据等进行仿真计算,将结果呈现。
航迹条件定义可分为水平轨迹条件定义和垂直轨迹条件定义。其中,垂直轨迹定义主要有:构型变化段(收起落架/收襟翼)、恒表速爬升段、恒梯度加速段、恒马赫数爬升等;水平轨迹定义主要有:转向新航向,切入导航台径向线,转向导航台,切入DME弧等。约束条件主要遵循实际运行中空中交通管制程序和飞行机组操作程序[6]。
EOSID性能仿真计算模型需提供用于设定水平和垂直剖面内航段转换的离场机动约束规则,调用机型、大气环境、机场等基础数据库,使用运动方程求解出飞机随时间变化的地面轨迹、上升角、转弯坡度、磁真航向等参数。将水平轨迹与垂直轨迹进行接合,输出飞机三维飞行轨迹。其中,以离场机动约束规则的定义最关键,须遵循并覆盖实际航空运行活动中空中交通管制和机组常用的规则和策略。
受离场条件影响,不同机场环境和跑道方向的一发失效起飞离场航迹各不相同,航段转换存在差异,需要对约束规则进行组合,如表1。计算模型只有根据从松刹车开始到起飞飞行航迹结束过程中航段间转换的约束规则组合,才能演算得到飞机基于性能限制随时间变化的水平方位、速度、高度、重量、爬升梯度、转弯坡度、转弯半径、磁(真)航向等状态参数和三维飞行轨迹[7]。
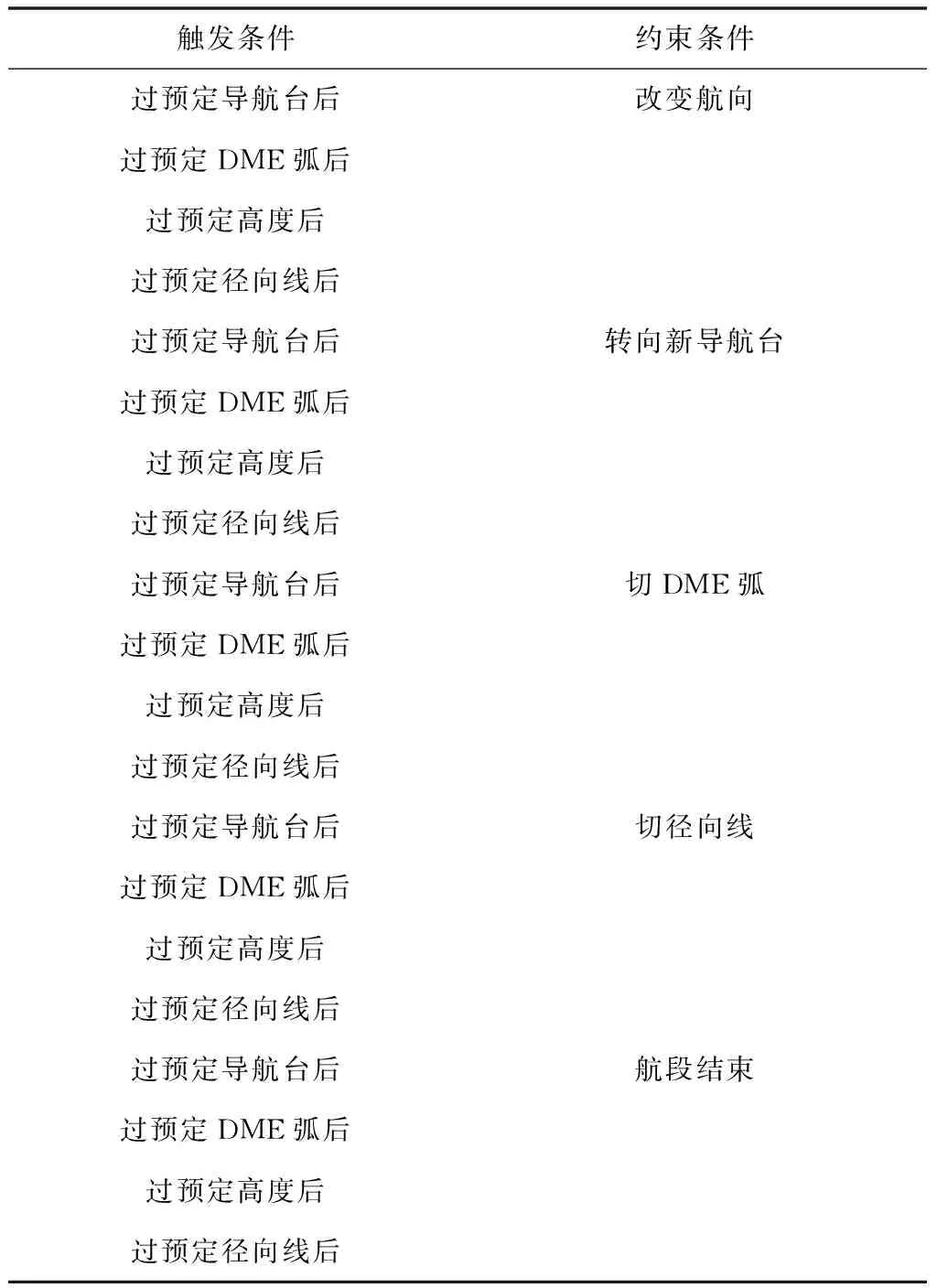
表1 转弯机动约束情况示意图
规则中包含依循离场操作程序的垂直约束及水平约束[8]。其中,水平约束可进一步细分为通过坡度、半径、速度等转弯参数描述的定参数转弯和通过导航台方位、径向线、DME(Distance measuring equipment)弧等方位参数描述的变参数转弯。均需在运动方程求解过程中被实时判断,以确定下一时刻的计算初始条件。
定参数转弯易于仿真实现但使用较少,变参数转弯使用广泛但仿真实现较为困难,本文主要讨论后者。通过方位参数定义水平机动轨迹时,需要结合EOSID操作程序的描述,这些描述包括水平机动起始点类型及相关导航台信息、水平机动结束点类型及相关导航台信息。
3 仿真计算模型关键内容实现
3.1 系统架构
由于EOSID航迹性能仿真分析计算必须由使用者结合具体机场环境,挑选离场航段转换的约束规则。规则的组合与搭配情况复杂,须划分界面层、功能层及数据层。仿真工具需要提供相对完整的交互界面,供使用者进行约束规则的预定义。通过功能层进行具体约束规则的流程实现和物理计算。在功能层运行过程中,还需从数据层获取与飞机运动状态相对应的气动数据和推力数据。具体如图3所示。
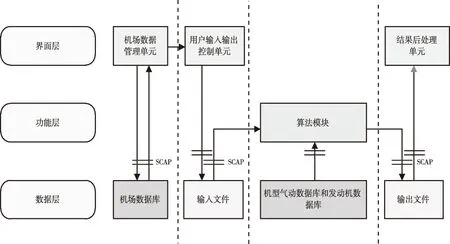
图3 仿真计算工具系统框架图
3.2 运动学模型
在EOSID航迹计算过程中,计算飞机从松刹车点开始到飞机离地后高于起飞跑道表面35英尺处的起飞航迹。再计算飞机离场爬升时的起飞空中飞行航迹。由于起飞阶段不考虑飞机沿跑道的侧向偏移,本文只列出起飞离地后空中运动的计算公式,具体如下
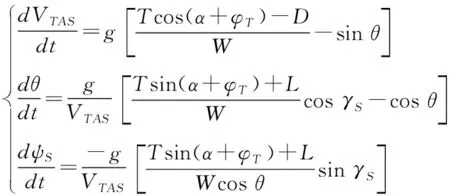
(1)

(2)
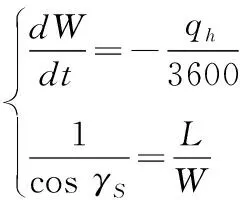
(3)
其中,VTAS为真空速,W为重量,T为发动机推力,L为升力,D为阻力,α为飞机迎角,φT为推力作用线与飞机迎角基准的夹角,γS为坡度角,ψS为航迹偏转角,X为水平距离,Y为横向距离,qh为小时耗油量,VW为风速,ψW为偏流角。
通过该公式,可以得到飞机离地后在空中运动的坐标和姿态数据,根据数据模拟飞机空中运动的轨迹路线。
3.3 模型约束规则与关键流程
变参数转弯的约束规则可分解为,飞机在进行机动的行动起始点和行动结束点拟实施的响应[9]。约束规则可按约束类型和约束方式进行划分。
按约束类型可分为垂直约束和水平约束。垂直约束主要来自于高度、速度,水平约束主要来自于导航台、DME弧、径向线。垂直约束和水平约束可独立触发、任意触发或共同触发转弯机动。
按约束方式可分为直接约束和间接约束。直接约束规则可以在运动学方程迭代计算中直接获得;间接约束规则必须结合飞机方位和导航台方位信息进行组合判断,仅当飞机的运动状态和方位满足相应条件时才能触发。
依据以上对行动点的分析结果,给出了如图4的实现流程。通过对转弯起始点和结束点的判断来触发约束条件的处理。然后依据约束类型和约束方式对约束条件进行计算。

图4 关键流程图
如图所示,流程首先以前一航段结束点的约束条件作为本航段起始点的初始条件进行运动学方程计算,直至到达行动起始点;在该行动起始点判断飞机是否引入转弯的计算,根据本阶段的约束类型和约束方式进行判断,并采取对应的运动学方程进行计算;当判定已到达行动结束点时,按照当前行动结束点的飞行状态继续进行后续计算,直至到达下一航段的行动起始点。
在根据本航的约束类型和约束方式进行判断和计算时,首先需要判断是否存在水平约束和垂直约束。若存在约束,则根据所定义的水平约束来判定该约束属于直接约束或间接约束,若直接约束可通过输入界面直接输入,并被计算内核程序直接调用进行计算;若间接约束需根据飞机飞行状态和输入界面的输入来综合判断并予以计算分析[10]。
4 仿真结果与分析
4.1 实验环境设计
在完成仿真计算模型的建立和实现后,结合具体机型的气动数据和推力数据,对上述方法进行仿真验证。本文根据提出的约束条件和约束引入流程,以某型国产喷气民机为例进行了EOSID性能仿真计算模型实现。仿真环境如图5所示,具体航迹预测界面如图6所示。

图5 民用飞机航迹仿真计算实验环境

图6 飞机失效离场航迹预测界面
4.2 航迹实验数据获取
实验对成都至宜宾航线进行了一发失效后离场飞行轨迹模拟仿真计算。航线地形的影像数据获取,需利用Ev-Creator软件制作地形数据。Ev-Creator软件支持的数据格式如表2所示。
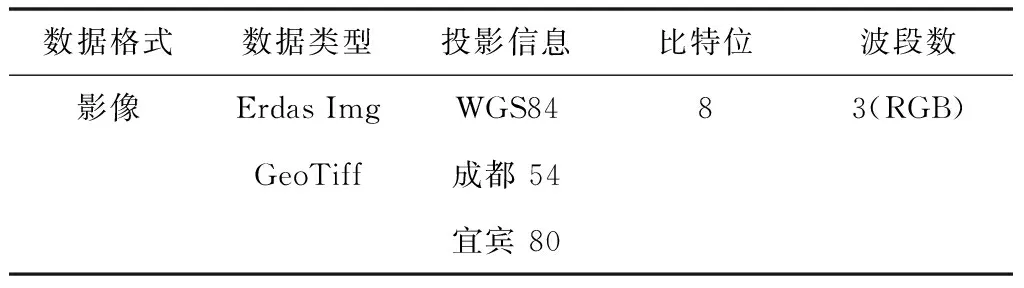
表2 Ev-Creator软件支持的数据格式
对原始影像数据的波段数、投影信息类型等进行前期处理。准备完成后进行制作,制作界面如图7所示。

图7 航线地形影像数据制作界面
4.3 实验结果与分析
为进一步验证所提方法的对民用飞机一发失效离场航迹计算的有效性,设计在相同实验环境下,与文献[2]方法进行对比。实验结果如图8所示。
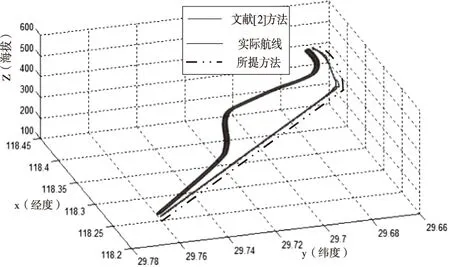
图8 实验对比图
分析对比图可知,文献[2]方法计算的航迹与实际航迹偏差较大,且转弯时机偏差较大;所提方法计算的航迹与实际航迹最贴近,转弯时机也较相同。说明所提方法计算民用飞机一发失效离场航迹较有效,且适用于高原飞行,具有较强实用性。
在进行轨迹模拟时,所需输入条件包括:该国产民机机型的起飞重量、起飞构型、起飞速度,机场的导航台信息、跑道信息、障碍物信息,以及航空运营人公布的EOSID离场策略等。得到实际跑道模拟图如图9所示。
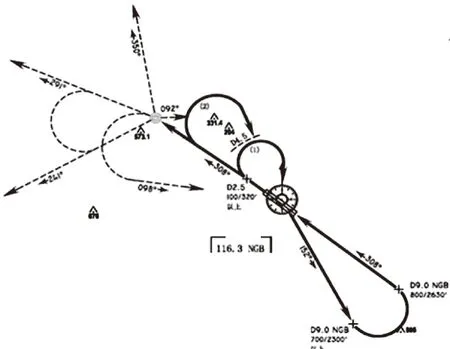
图9 实际跑道模拟图
使用所提方法计算的轨道对比与某型国产民机配套的一发失效离场性能仿真计算模型内的一发失效情况后的返场路径。
所提方法计算得到的实际飞行轨迹如图10,可见其正确实现了该航空运营人EOSID应急程序所要求的转弯机动航迹计算。实际计算得到的飞行轨迹在D2.5 NGB开始第一个右转弯时与程序图中的轨迹存在稍许差异,一方面是因为飞机在转弯过程中不断加速,另一方面是因为在转向导航台的约束模式计算中使用了定坡度转弯,导致转弯半径逐渐增大所致。由于EOSID应急离场程序图并不是对飞机飞行轨迹的真实记录,而是用于指导飞行员操纵飞机的策略性描述,故本文算例计算结果是可以被接受的。

图10 仿真计算得到的EOSID轨迹
5 结束语
针对传统方法对国产民机机型配套的EOSID离场航迹性能分析出现准确性差、适用范围窄等问题。本文讨论了民用飞机一发失效应急离场航迹性能分析仿真计算的关键方法,对仿真计算中水平剖面内转弯机动时的主要约束进行了归纳和分类,给出了关键计算流程,并进行了工程实现。最后通过仿真对比实验证明,该方法准确性高,适用范围广,为民用飞机一发失效离场航迹计算提供了有利依据。但研究仍存在不足,将从计算效率方面进行进一步研究。
猜你喜欢
航空学报(2022年9期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
计算机仿真(2021年2期)2021-11-17
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
智族GQ(2019年9期)2019-10-28
新闻前哨(2019年6期)2019-09-10