
基于扁平电机的轻混式履带车辆综合传动方案
2021-11-15 07:36邹天刚闫清东盖江涛侯威王志涛帅志斌孙雪岩
兵工学报 2021年10期
邹天刚, 闫清东, 盖江涛, 侯威, 王志涛, 帅志斌, 孙雪岩
(1.中国北方车辆研究所, 北京 100072; 2.北京理工大学 机械与车辆学院, 北京 100081;3.32381部队, 北京 100072)
0 引言
因工作环境恶劣、使用工况复杂、功能要求多样,履带车辆传动装置结构复杂、技术难度高,历来是世界各国重点研究的技术方向之一。历经多年的技术探索,美国、德国、法国、英国等纷纷研制了液力机械综合传动装置,并广泛应用于履带车辆中。我国的液力机械综合传动设计与制造技术也已获得全面突破,形成了系列化液力机械综合传动装置,但随着车辆创新发展的新需求变化,液力机械综合传动装置在电能供给、功率密度、机动性能等方面,难以全面满足需求。
近年来,电传动技术的研究逐渐成为车辆传动技术研究领域的热门方向。纯电传动系统主要由电池组、电动机和控制系统组成,结构简单,但由于应用履带车辆转向工况时缺乏双侧电机共同提供动力驱动外侧履带的方法,致使电机需求功率大,难以满足体积和质量控制的约束条件。为此,人们研究出了机电复合传动方案,有效解决了这一难题[1]。然而,受到现阶段电池能量密度不高的制约,尤其是电机应用于高温、强冲击振动环境下,工作寿命与可靠性难以保证,人们又开发出了重混式传动装置,通过机械和电力复合方式减小电力驱动的功率占比,从而缓解电池功率密度不高和电机寿命难以保证的问题。总体而言,电传动技术目前仍处于技术攻关阶段,形成成熟的电传动产品仍有一些关键技术需要突破[2]。
与此同时,液力机械综合传动与电传动在履带车辆上呈现出技术融合、产品组合发展的趋势。例如,采用扁平电机技术开发起动发电一体机(以下简称一体机),实现了用扁平电机瞬时拖动发动机实现起动和发动机起动后带动扁平电机实现发电的功能,液力机械综合传动技术与电传动技术发挥各自所长共同推动了履带车辆传动技术进步,但是,一体机与液力机械综合传动装置并未在驱动车辆方面实现共同工作[3]。
本文通过结构集成优化、参数匹配与机动性能预测等研究工作,提出一种基于扁平电机的轻混式多功能综合传动方案。结果表明,该方案可有效补足液力机械综合传动装置供电能力短板,提高体积功率密度,提升机动性能,扩展车辆动力舱功能[4],有效控制质量,有效解决了车辆动力舱的布置安装问题,避免了由于原方案导致车辆车长方向过长引起的其他问题,结构合理可行。
1 现状及问题分析
在传动领域,液力机械综合传动装置仍是履带车辆传动的主流型式,轮式车辆传动仍以液力机械式自动变速箱和电控机械式自动变速箱为主,随着多种型式的电传动技术在探索研究中逐渐成熟,在多种传动型式并行发展的态势中,如何选择传动装置的技术方案成为一大难题。由于液压机械传动受到传递效率制约,短期内难以得到大规模应用,本文主要针对履带车辆研究液力机械综合传动、电传动以及二者融合产生的混合驱动(轻混和重混)技术优选及概念方案问题。
由于传动装置方案涉及到的评价维度多,一般会出现优点和缺点并存的情况,方案选择很困难。例如,在功能方面,电传动往往具备起动、发电、电动、能量回收的功能,而液力机械综合传动往往具备拖车起动、风扇驱动、压气机驱动的功能。因此,为了从各个角度综合评价各类型传动的优劣,为最终技术方案优选提供量化依据,将上述分析结果进行评分。评分分为1~5分,得分高者代表适合作为近期推广应用的技术方案。综合评分情况如表1所示。
液力机械综合传动装置技术成熟,可靠性高,机动性能和功率密度提升困难,尤其是在缺乏为车辆提供电能满足越来越高的电能需求方面,差距大;机电复合传动、纯电驱动、重混式综合传动则由于对电机功率需求大且需要长时间工作,其工作可靠性、研制周期等方面存在短板,作为短期内的技术方案风险较大。
传统的液力机械综合传动装置与柴油机实现机械接口连接和功能、性能匹配,车辆起动电机往往布置在柴油机上,传动方案不涉及到电力部件,如图1所示。
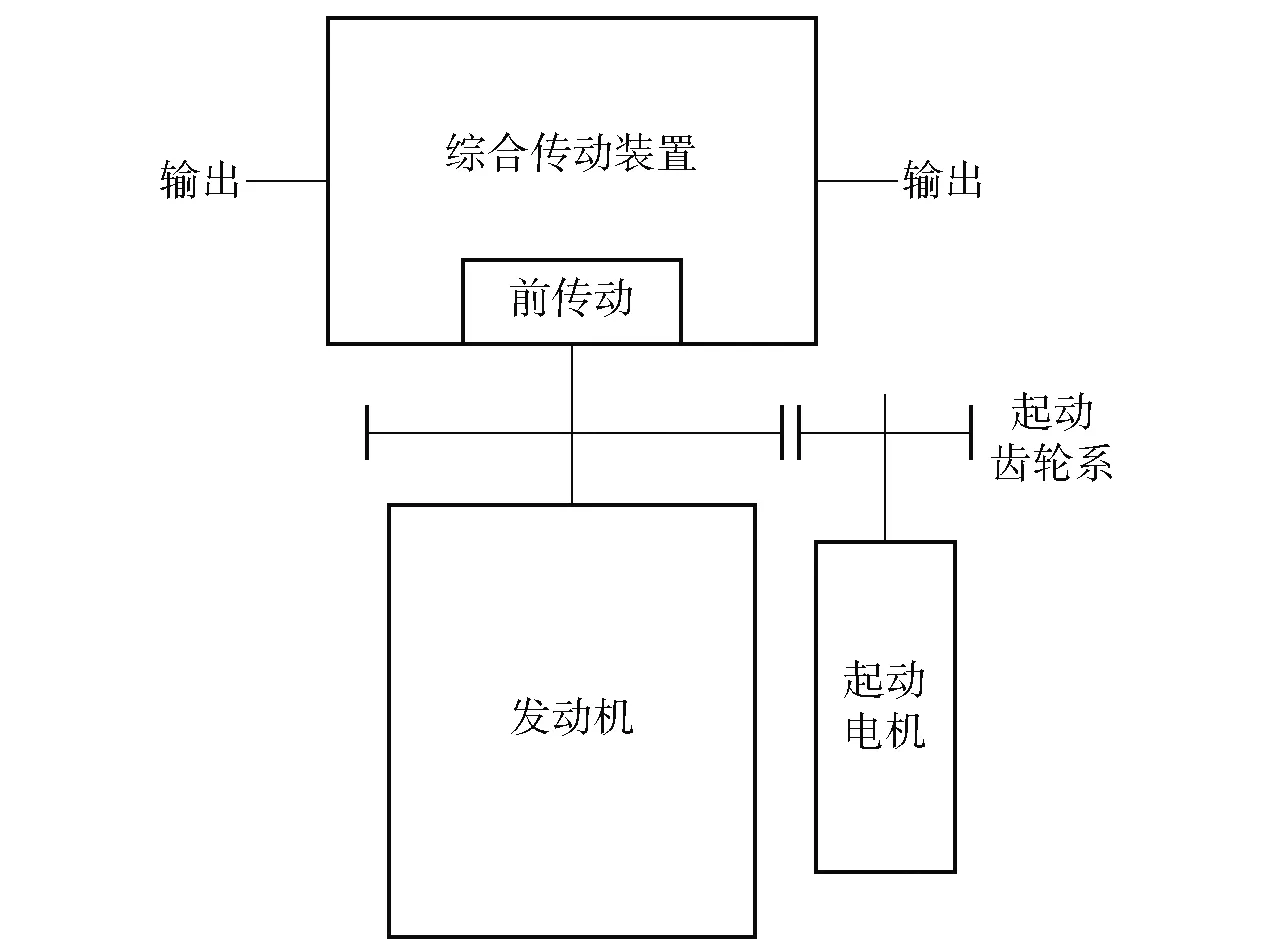
图1 传统液力机械综合传动装置结构布置方案Fig.1 Layout scheme of traditional integrated hydraulic mechanical transmission
随着技术发展,液力机械综合传动装置逐渐开始形成与电力部件集成的方案:采用基于扁平电机技术的一体机,实现瞬时拖动发动机实现起动和发动机起动后带动一体机实现发电的功能。然而,一体机与液力机械综合传动装置并未在驱动车辆方面实现共同工作,即一体机并未在车辆直驶、转向、制动过程中起到助力或者回收能量的作用。本文通过对各型传动的对比分析和量化综合评估(见表1),提出了当前在较短时间内兼顾发展需求和技术可行性的最佳传动型式——轻混式综合传动。
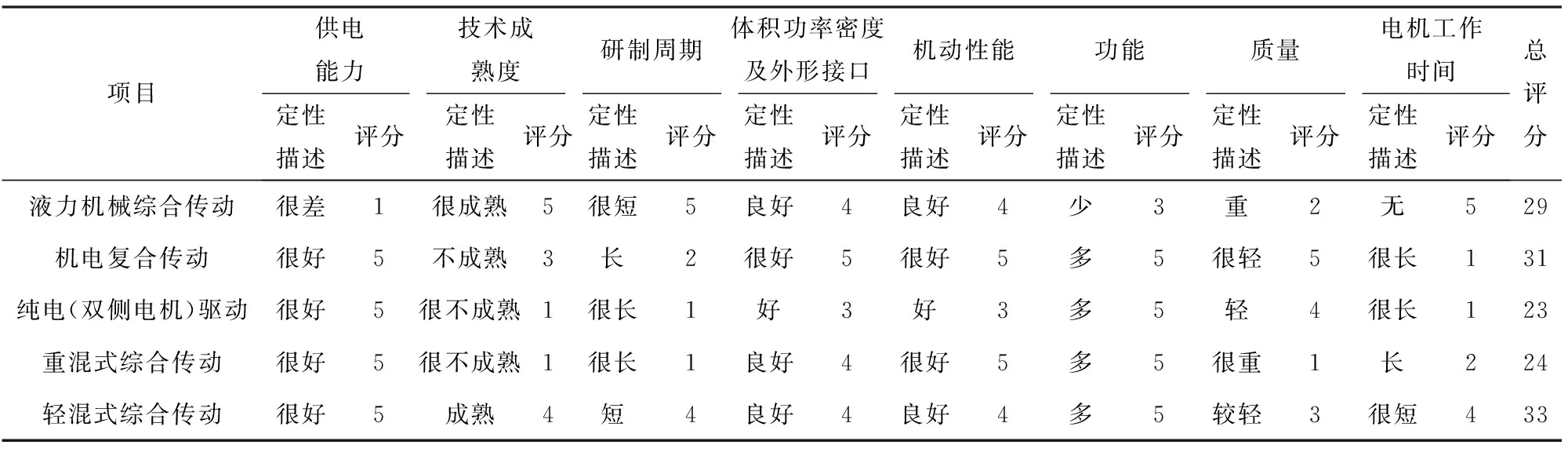
表1 各型传动综合评分表Tab.1 Comprehensive rating scale of different transmissions
基于轻混式综合传动概念,为满足履带车辆对增加供电功能、提升机动性能、进行整车轻量化控制等迫切需求,需研究如何合理匹配实现功能扩展或增强,如何在结构上实现高功率密度集成,如何通过参数匹配实现性能提升,构建出轻混式综合传动概念方案[5]。
2 轻混传动方案设计流程
本文立足现有技术基础、应用推广基础,力图抓住核心关键因素构建约束条件驱动方案的设计流程。在充分考虑到目前阶段履带车辆已经实现一体机与综合传动装置在车辆上共同应用的背景下,以此为基础进行轻混综合传动方案构建,在继承的同时,引入某些约束条件,从而避免轻混传动方案设计过程中多次出现不满足某些约束条件而重新设计的问题。具体流程如图2[6-7]所示。

图2 轻混传动方案设计流程Fig.2 Design flow of lightweight mixing transmission scheme
流程具体步骤如下:
步骤1明确功能需求:起动、发电、电动助力、能量回收是否需要。
步骤2选定液力机械综合传动及整车主要性能相关参数:发动机特性、综合传动各环节传动比、液力变矩器与泵马达等性能参数、承载能力、侧减速器传动比等。
步骤3确定空间尺寸约束:动力舱空间尺寸、综合传动装置外形尺寸。以便确定扁平电机结构设计的尺寸约束。
步骤4确定扁平电机发电工况:额定功率、额定转速、车辆提供的电压等,以便开展扁平电机尺寸设计。
步骤5确定扁平电机尺寸范围(直径与长度组合关系):在步骤3、步骤4条件确定后,得到直径和长度尺寸的相互影响关系。
步骤6确定扁平电机安装位置:依据空间尺寸约束条件,根据扁平电机直径与长度的影响关系,选定扁平电机的尺寸(直径和长度)。
步骤7确定扁平电机至发动机传动比:校核拖动力矩是否足够起动发动机,如不足,则需要增大传动比,从而提高发动机飞轮输入端的拖动扭矩。拖动力矩校核可采用类比计算方法,假设传统方案发动机起动电机最大拖动力矩为TYmax,起动电机至发动机的传动比为iY,假设本传动方案中扁平电机至发动机的传动比为iE,则为保证车辆起动所需拖动力矩,本传动方案中扁平电机的最大拖动力矩应设计为Tmax·iE≥TYmax·iY,即Tmax≥TYmax·iY/iE.
步骤8机动性能提升情况计算:分别确定发动机和扁平电机的转速与扭矩关系,将二者沿转速进行累加合成,以此为基础,进行车辆牵引特性计算,核算车辆加速性能、转向性能、最大车速牵引力等,如不满足机动性能提升目标,则需要重新调整步骤3.
步骤9进行工作模式划分,并制定控制策略。根据履带车辆使用需求,将宽速域恒压发电模式、快速起动发动机模式、加速和小半径转向助力模式、制动能量回收模式4种工作模式(发电、起动、助力、制动)之间的切换关系描述如图3所示。图3中表示了改进前及改进后的系统组成图,在具体工程设计中,逐一对各个工作模式开展控制系统(含软件)设计[8-9]。
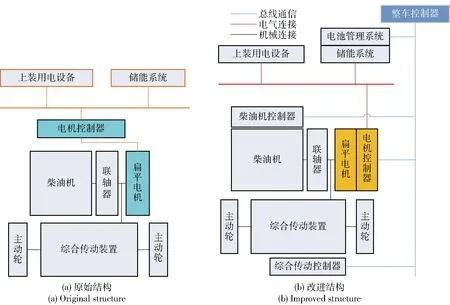
图3 系统组成结构图Fig.3 System composition
图4为方案的系统组成及各工作模式下控制策略关系,4种工作模式的简要分析和解释如下:
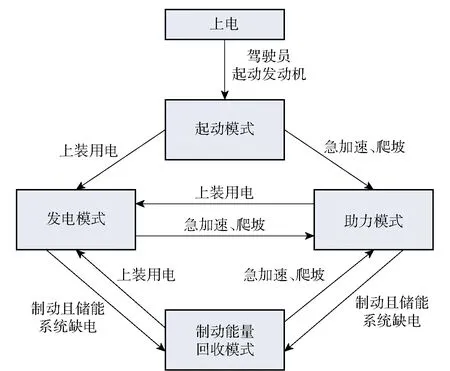
图4 系统组成与各工作模式下控制策略关系Fig.4 System composition and control strategy under different working modes
1)发动机快速起动模式。当整车系统上电,驾驶员按下起动发动机按钮时,进入发动机快速起动模式。此时电机工作在电动状态,从储能系统获取电能并转化成机械能,拖动柴油机至起动转速以上,发动机控制器检测到发动机转速大于最低起动转速时,开始喷油点火并起动发动机。当电机控制器收到柴油机控制器发来的起动成功信号后,电机控制器关闭,退出起动模式。
2)宽速域恒压发电模式。当储能系统电量未充满或上装用电设备需要大功率用电时,电机进入发电模式。首先通过柴油机控制器将柴油机拖动至发电模式的最低转速以上,再根据整车控制器发送的需求用电功率指令和实时采集的母线电压值,进行发电模式控制和功率输出。当储能系统电量充满或上装用电设备结束用电后,退出发电模式。
3)驱动助力模式。当车辆处在急加速、爬陡坡、小半径转向等需要大扭矩输出的工况下,且储能系统内存储的电量足够时,则电机进入驱动助力模式。电机工作在电动状态,根据整车控制器的扭矩命令和综合传动控制器的挡位信息,输出相应的驱动扭矩。当驱动助力需求结束,或储能系统中的电量低于预设阈值后,退出驱动助力模式。
4)制动能量回收模式。当车辆处在制动、下长坡等工况,且储能系统中所存储的电量不足时,进入制动能量回收模式。电机工作在发电状态,将车辆的动能转化成电能,存储至储能系统。当制动工况结束,或储能系统电量充满后,退出制动能量回收模式[10-11]。
3 结构集成方案
本文采用功能拓展法对动力舱布置方案进行研究,分别考虑了综合传动装置集成电机和液压泵马达的形式,通过功能是否满足车辆的需求进行对比,具体方案对比结果如表2所示。
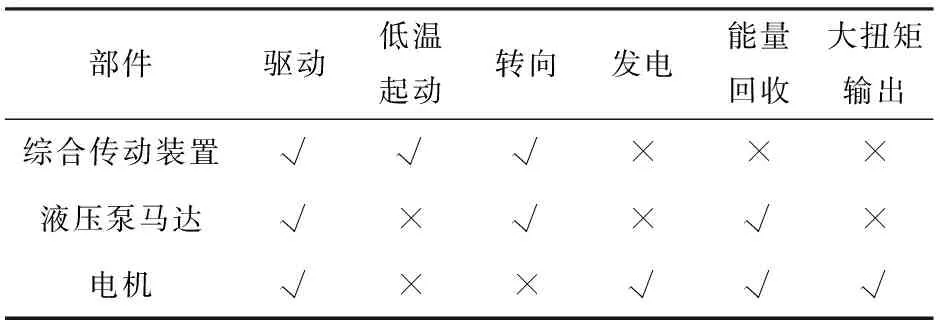
表2 基于功能性综合传动装置集成方案对比Tab.2 Comparison of integrated transmmision scheme
由表2可以得出,基于车辆的实际需求,综合传动装置集成电机能够完全满足车辆的需求,为最佳的动力舱集成形式。电机在履带车辆的动力传动系统中,可以在困难路面(如爬坡、泥泞道路)下提供额外的动力输入,从而使履带车辆能够快速通过困难路面,并且在制动等工况下,起到能量回收的作用,可以最大限度地节约能源,降低履带车辆的平均油耗,提高车辆的经济性。
从履带车辆的动力舱布置角度来看,主要分为纵置和横置两种结构方案。在动力舱纵置方案中,由于动力舱的横向空间有限,扁平电机只能布置在发动机和液力机械综合传动装置之间,如图5所示。在以往的动力舱纵置方案中,发动机长度沿着车辆长度方向布置,导致动力舱的长度过长,从而引发车体长度尺寸大,车辆质量也居高不下。随着车辆轻量化发展趋势越来越明显,以纵置布置方式为基础,在发动机和综合传动装置之间再串联扁平电机,此种方案动力包(综合传动装置、发动机和辅助系统)的长度尺寸能达到2 152 mm,导致车辆长度过长,显然这是难以接受的方案[12]。

图5 动力舱纵置布置示意图(扁平电机布置于前传动与发动机之间)Fig.5 Longitudinal layout of power cabin (the flat motor is between the front transmmision and the engine)
考虑动力舱纵置方案中增加扁平电机会增加车辆长度,所以重点考虑动力舱的横置方案,其方案为在发动机输出端至液力机械综合传动装置的输入端(即增速箱输入端)之间集成通轴式的扁平电机,此种方案动力包(综合传动、发动机和辅助系统)的长度尺寸可控制在1 710 mm,可以很好地控制整车的长度尺寸,布置示意图如图6所示。然而,此种布置方案存在的不足在于扁平电机布置在发动机和综合传动装置的中间位置,不但散热条件较差,而且电缆连接等位置均只能考虑在扁平电机外圆位置上,但该位置不满足车辆驾驶舱与动力舱的接线要求。
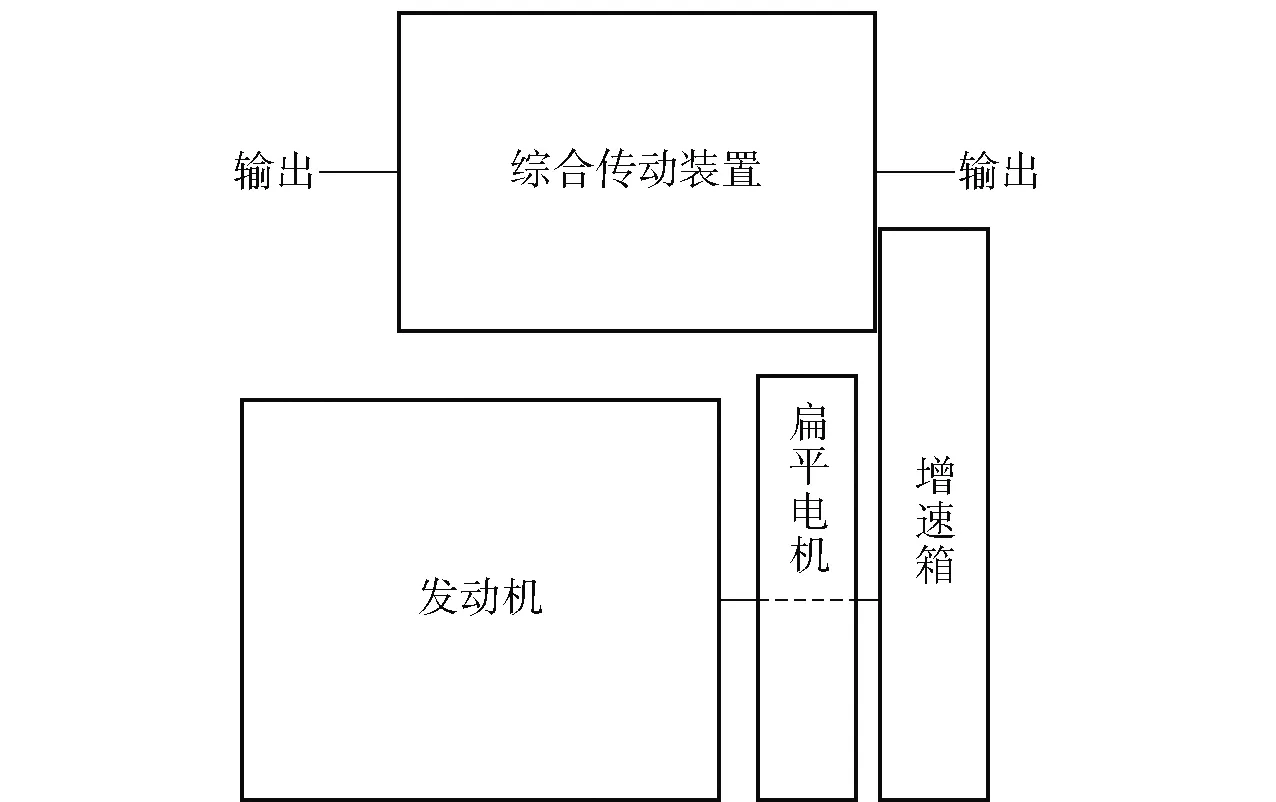
图6 动力舱横置布置示意图(扁平电机布置于增速箱内侧)Fig.6 Transversal layout of power cabin(the flat motor is placed in the speed-increasing gearbox)
通过综合考虑分析上述两种布置方式的缺点及整车的适应性,本文提出了一种新的布局思路,即将扁平电机布置在综合传动装置增速箱的外侧,既能提供良好的散热条件,其外侧空间也比较方便进行电缆连接,如图7所示。该布局方法需要解决两个问题:一是增速箱需要设计出同时连接发动机和扁平电机的通轴;二是为了确保动力舱整体布置合理性,需要将综合传动装置的增速箱位置向车体中心线附近平移出一个扁平电机的轴向长度。此种方案动力包(综合传动、发动机和辅助系统)的长度尺寸可控制在1 710 mm,且方便扁平电机散热和接线,方案最优。

图7 动力舱横置布置示意图(扁平电机布置于增速箱外侧)Fig.7 Transversal layout of power cabin(the flat motor is placed in outside of the speed-increasing gearbox)
本文采用的方案与原方案性能无差异,从车辆结构的角度解决了车辆动力舱的布置安装问题,避免了由于原方案导致车辆长度过长引起的其他问题。
4 参数匹配与性能预测
本文提出的轻混传动技术方案,旨在采用小功率的扁平电机(功率170 kW)与传统综合传动装置实现混联后,匹配小功率发动机(功率960 kW),力图达到或超过传统液力机械综合传动装置匹配大功率发动机(功率1 103 kW)的效果,从而降低发动机功率需求而提升车辆的轻量化水平。轻混传动技术方案在原有机液匹配的基础上,增加了电机性能的匹配计算,匹配变化由原只考虑发动机输出特性转变为同时考虑发动机与电机的输出特性并进行合成。电机采用大功率三相交流电机。
依据方案的结构形式,得出直线牵引特性的动力因数:
(1)
式中:D为动力因数;Me为发动机扭矩;i、η分别为发动机到主动轮的传动比和效率;G为车辆战斗全重;Rz为主动轮半径。
转向牵引计算按照(2)式和(3)式计算:
(2)
(3)
式中:Du为单侧制动转向动力因数;R为规定转向半径;De为按照大于R转向的动力因数;f为地面阻力系数;μ为转向阻力系数;L为车辆履带接地长;B为车辆中心距;η1为循环功率效率。
对该方案进行运动学分析,其车速的计算如(4)式所示:
(4)
式中:v为车速(km/h);ne为发动机转速(r/min);iq、ib、ic分别为前传动箱、变速箱、侧减速器传动比。
为方便效果评估,本文针对960 kW发动机、1 103 kW发动机分别匹配0 kW和170 kW电机的4种匹配方案,开展详细的性能匹配计算。因计算过程相同,在对比4种方案结果的前提下,针对4种方案(见表3)的最优匹配形式方案1进行详细分析[13]。
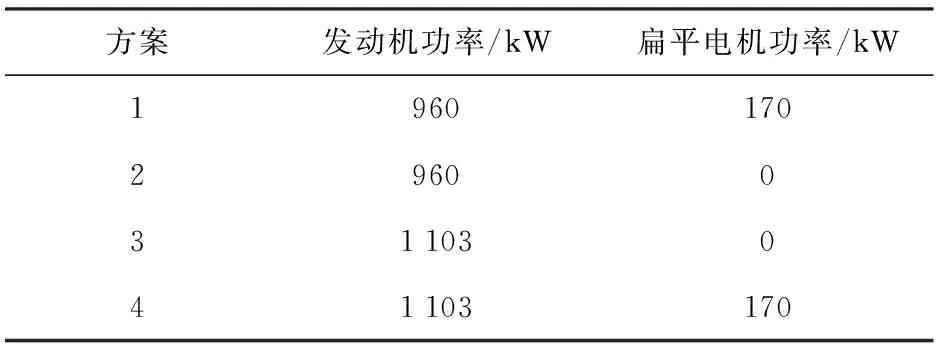
表3 4种匹配方案情况Tab.3 4 matching schemes
在确定发动机功率和外特性、电机扭矩- 转速特性、变矩器循环圆直径、前传动比、汇流排传动比、传动箱传动比、侧减速器传动比、主动轮半径、车重等参数后,形成了最终传动方案。图8所示为发动机(功率960 kW)的外特性图,图9为扁平电机(功率170 kW)的外特性图,为满足整车机动性能提升的需求,重点围绕最大车速、加速性能、爬坡性能、转向性能进行参数匹配和性能预测[14-16]。
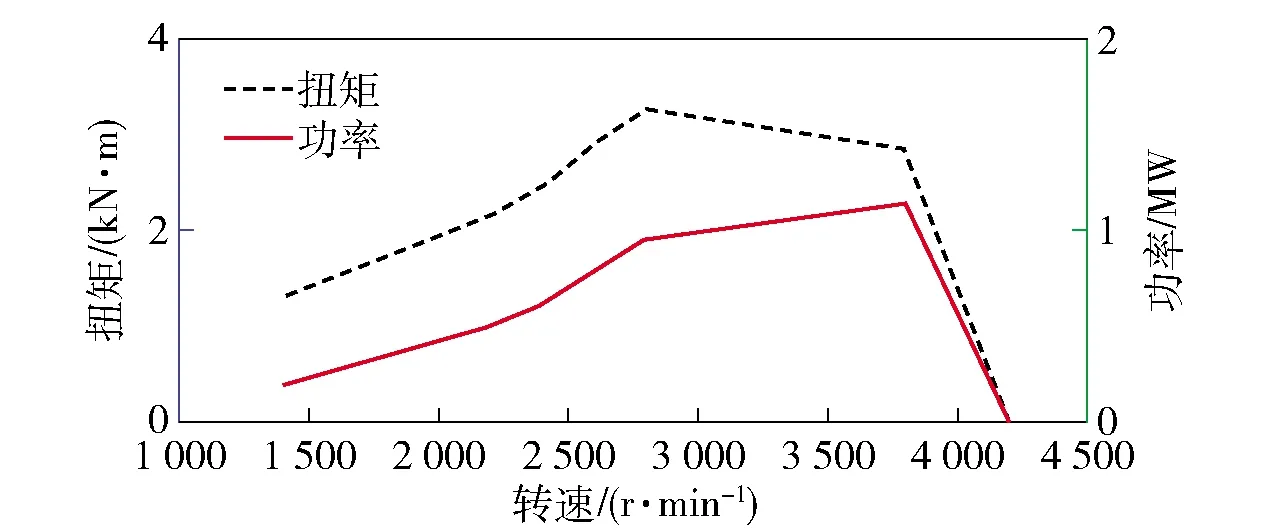
图8 发动机(功率960 kW)外特性图Fig.8 External characteristics of engine (960 kW)

图9 扁平电机(功率170 kW)外特性图Fig.9 External characteristics of flat motor (170 kW)
发动机经增速箱、前传动作用到变矩器泵轮的转速和扭矩与变矩器泵轮自身由液力传动作用而得到的转速和扭矩之间的关系如图10所示。图10标示了液力变矩器各传动比下发动机与液力变矩器的匹配特性,其中液力变矩器在发动机最大功率点的传动比为0.825,液力变矩器高效工作区域为2 967~3 265 r/min,变矩器高效工作区域对应的变矩器传动比区间为[0.538,0.800][17-18]。
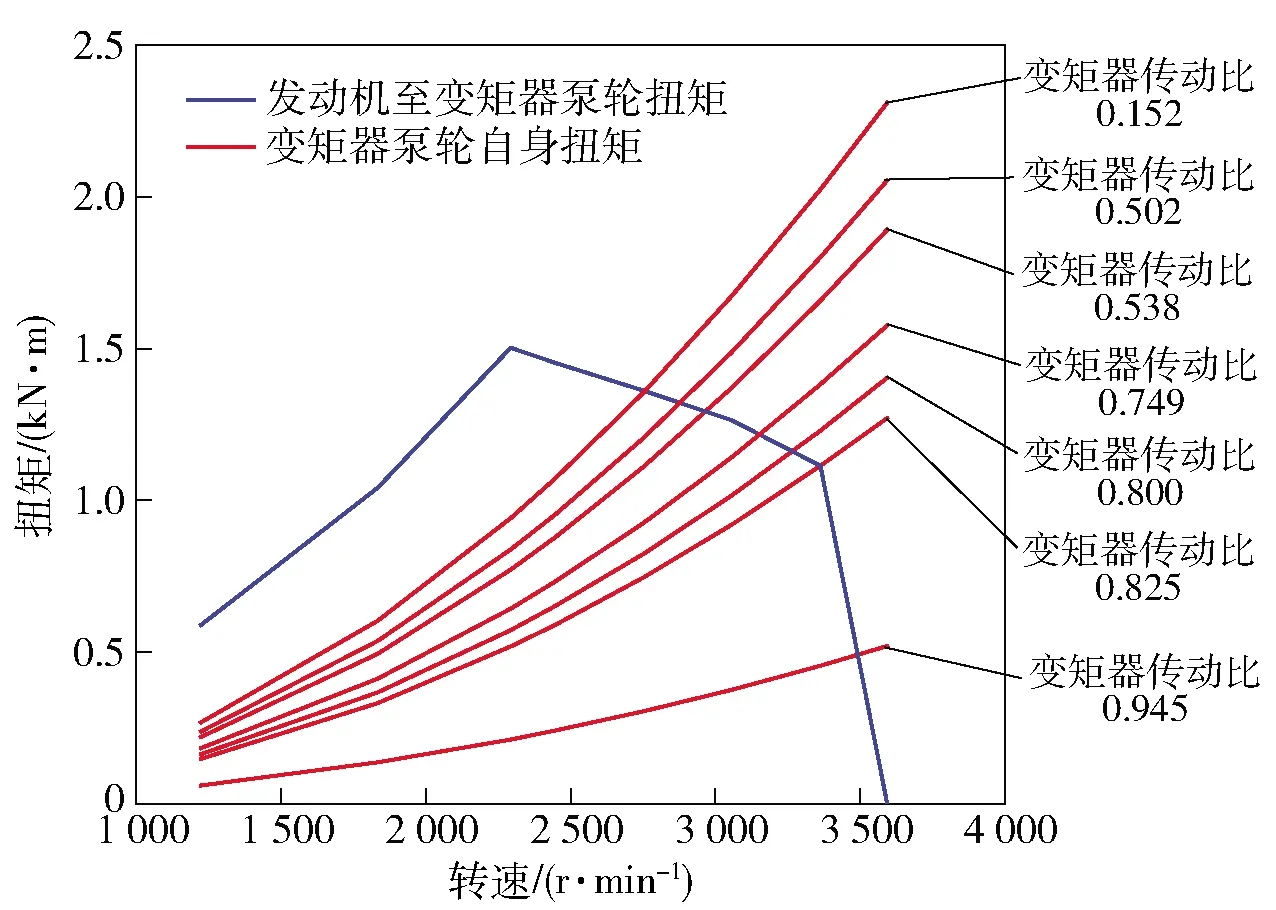
图10 发动机和液力变矩器匹配特性Fig.10 Matching characteristics of engine and hydraulic torque converter
根据牵引计算,5挡(最高挡位)机械工况时,发动机额定工况,对应45 t车辆车速为74 km/h时,动力因数为0.058,动力因数大于水泥路面的动力因数0.04. 车辆爬32°坡时的匹配结果(各个挡位发动机转速和车速之间的关系,以及各个挡位主动轮上输出的力和车速之间的关系以及不同坡度的阻力)如图11所示。由图11可以看出,车辆在平原地区爬32°坡时的车速为7.1 km/h,满足车辆机动性需求[19-20]。

图11 100%发动机油门开度、100%扁平电机输出牵引计算Fig.11 Calculated curves of 100% engine throttle opening and 100% flat motor output
发动机和飞轮电机共同工作下,车辆在水泥路面2挡起步,车辆在4挡达到32 km/h,0~32 km/h加速时间为7.8 s,加速距离44 m. 图12中显示了车辆速度、加速距离和加速时间之间的关系[21-22]。

图12 加速特性曲线(100%油门开度、100%扁平电机输出)Fig.12 Acceleration characteristic curves (100% engine throttle opening and 100% flat motor output)
转向特性匹配结果如图13所示。由图13可以看出,车辆各挡在不同路面转向时,主动轮输出的动力因数和车速的关系:低挡位时发动机可提供转向系统足够的功率,转向系统可以克服地面阻力系数为0.82的路面(图中横线为动力因数0.82的水平线),路面状况越好则发动机输出的动力因数越大;除地面阻力系数大于0.82的路面外,转向系统提供的动力因数可以克服其余路面的转向阻力[23]。

图13 转向特性曲线Fig.13 Steering characteristic curves
5 结论
本文综合考虑液力机械综合传动、电力驱动技术,依据一种多目标综合评价方法进行多种传动类型优选基础上,提出一种履带车辆基于扁平电机的轻混式多功能综合传动方案。得出如下主要结论:
1)本文综合考虑动力舱布置及车长等因素提出的将扁平电机布置于增速箱外侧的轻混式传动方案,能够实现动力舱的高紧凑集成,可有效缩短车长;在增速箱外侧布置尺寸较大的扁平电机,能够提供更大的输出扭矩。
2)本文开展的参数匹配与机动性能预测结果表明,采用基于扁平电机的轻混方案,其机动性能明显优于传统的液力机械综合传动装置方案。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
农业工程学报(2022年12期)2022-09-09
汽车实用技术(2022年14期)2022-07-30
智能制造(2021年4期)2021-11-04
China International Studies(2021年5期)2021-01-03
小学阅读指南·低年级版(2020年9期)2020-10-12
小天使·三年级语数英综合(2019年6期)2019-06-27
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
