
机械臂辅助脑深部电刺激术精准度的研究
2021-11-11 05:48李建宇任志伟郭松俞凯佳胡永生李勇杰
临床神经外科杂志 2021年5期
李建宇,任志伟,郭松,俞凯佳,胡永生,李勇杰
20世纪60年代,第一台机械臂用于硬件制造工业,最初的设计理念是想取代人类制造。但随着科技的发展,机械臂应用领域的扩展,机械臂更多是帮助人类完成各种精细重复的工作[1]。1978年,Sheinmann研发出第一台医用机械臂(Programmable Universal Manipulation Arm),应用于CT引导下的脑活检,提高了手术的精准度,缩短了手术时间[2]。随后几年,因为脑深部电刺激(deep brain stimulation,DBS)和脑活检均属于立体定向手术,所以机械臂逐渐应用于DBS手术。
首都医科大学宣武医院功能神经外科从2017年开始采用机械臂辅助下埋植sEEG电极,用于癫痫患者的脑电图监测;2019年机械臂开始用于DBS治疗运动障碍病的手术。由于DBS手术需要埋植电极的精准度非常高;为此本研究回顾分析10例机械臂辅助埋植电极DBS治疗的运动障碍病患者的临床资料,探讨其精准度。
1 资料与方法
1.1 一般资料 本组患者中男3例,女7例;年龄44~78岁,平均年龄(61.4±9.0)岁;帕金森病8例,肌张力障碍2例;丘脑底核(subthalamic nucleus,STN)作为靶点者6例,苍白球内侧部(globus pallium interior,GPi)作为靶点4例。
1.2 方法
1.2.1 手术流程 共埋植20根脑深部电极,术中植入的刺激电极采用四触点电极(3387型,Medtronic Inc,Minneapolis,MN)。所有病例的电极植入,均在局麻下采用华科精准神经外科手术导航定位系统SR1进行。安装Leksell立体定向头架,适配DBS专用基框,行术前CT扫描。Sinoplan手术计划系统,导入术前不同扫描序列MRI图像(T1WI、T2WI、QSM)和CT等,多模态影像融合后,计算出目标靶点的三维坐标和电极入路的角度。立体定向头架通过Y形叉直接和机械臂相连。机械臂位于患者头部正上方或斜上方(图1)。固定机械臂后,使用基框标记点进行患者注册和精度验证。拆除基框消毒铺巾后,更换DBS专用适配器固定α-Omega微电极记录系统,机械臂引导下通过套管针确定电极的头皮入路点。切开头皮,严格止血后,暴露颅骨,再次在机械臂引导下套管针确定颅骨钻孔位置;电钻钻开颅骨后,再次安装基框进行术中注册和精度验证。更换DBS专用适配器固定微电极记录系统,套管针引导下确定硬膜入路位置,切开硬膜,并在皮层上造瘘。机械臂位置距靶点187 mm后,置入套管针后进行微电极测试(图1)。微电极记录靶点核团的细胞放电,更换刺激电极(治疗电极),测试患者治疗窗数值(即症状改善的阈值和副反应阈值差)。如测试结果满意,拆除立体定向头架后全麻下埋植脉冲发生器,操作步骤同之前的文献报道[3];如果测试结果不满意,采用O臂复查电极位置,根据设计靶点进行调整。

图1 机械臂的摆放及术前注册和术中引导电极植入其中每个触点间距3 mm,最远端为0触点,红色圆点代表设计电极位置的三维坐标图2 植入4触点电极术后CT复查影像及电极示意图
1.2.2 实际靶点与设计靶点差值的计算 采用√(X术前-X术后)2+(Y术前-Y术后)2+(Y术前-Y术后)2公式(即欧基米德公式)计算出术前设计靶点与术后实际靶点的直线距离。实际靶点的坐标值采用植入电极0触点下缘中心(图2)。

2 结 果
2.1 植入电极设计路径与实际路径的角度及靶点坐标值比较 10例患者20根电极的实际电极与设计电极路径的Arc角、Ring角度比较,差异均无统计学意义(P=0.584,P=0.282);见表1。双侧实际电极与设计电极坐标(X,Y,Z)值比较显示,实际电极与设计电极的右侧X、Y和左侧Y值的差异有统计学意义(P=0.043,P=0.030,P<0.01),其他坐标值间的差异均无统计学意义(表2)。

表1 植入电极设计路径与实际电极路径的角度比较
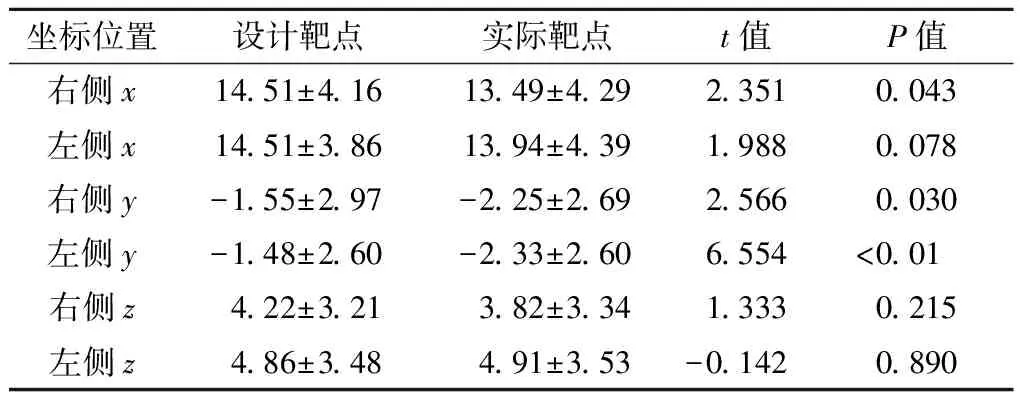
表2 设计靶点与实际靶点的三维坐标值比较(mm)
2.2 实际靶点与设计靶点的距离 实际靶点与设计靶点的三维坐标之间的距离为(1.81±0.81)mm。去除深度因素,实际靶点与设计靶点的二维坐标间的距离为(1.41±0.82)mm。
2.3 并发症 本组患者在术中及术后短期内均没有并发症发生,包括与手术相关的并发症及与刺激器硬件相关的并发症。与刺激参数相关的并发症均通过调节刺激方式(单极、双极)、刺激触点和刺激参数(电压、频率和脉宽)得到解决。
3 讨 论
机械臂辅助DBS和sEEG手术已经广泛应用于功能神经外科。本研究3年前开始采用华科精准机械臂辅助sEEG手术,近期又将此项技术应用于DBS植入术;总结分析10例运动障碍患者机械臂辅助电极植入的数据,探讨此种手术的精准度。
DBS手术需要非常高的精准度,如果电极植入的误差超过2 mm,手术的效果就会受到明显的影响[4]。手术的精度是指电极植入的实际靶点坐标与设计靶点坐标之间的差值;手术的准度是指此项技术的可重复性,即统计学中的标准差。手术路径的精准度会影响到电极穿过靶点核团的长度,也就是核团内有效电极的长度,会影响到术后刺激触点选择的余地和参数的调整范围。
本研究采用华科精准机械臂辅助下植入20根电极,实际靶点与设计靶点的平面误差为(1.41±0.82)mm;因为深度误差可以通过调节刺激触点的方式进行代偿,所以可以忽略,在文献报道中也有类似算法[5,15]。DBS电极植入精确度的统计结果与其他中心的结果基本一致[13,15-19]。De Benedictis报道[6]116例儿童患者采用机械臂辅助植入电极,用3D欧几里德距离测算法计算实际靶点与设计靶点的差距;其中sEEG(n=36)为1.96 mm,苍白球毁损术(n=12)为1.33 mm,DBS(n=3)为1.60 mm。Goia等报道[7],24例采用ROSA机械臂全麻下埋植的DBS患者,实际靶点与设计靶点的误差左右侧分别为1.12 mm和0.81 mm。Ho等报道[5],20例机械臂辅助下DBS患者,实际电极与设计电极的平面误差为(1.40±0.11)mm,深度误差为(1.05±0.18)mm。本组患者计算的设计靶点右侧偏内偏后,左侧偏后,在文献里也有类似的报道[7]。分析误差产生的原因可能与以下因素相关:(1)本组患者的植入电极中有3根电极的深度进行了调整,在计算设计靶点深度时只更改了Z值,因为电极植入有一定的角度,但并没有更改X值和Y值,这可能是造成误差产生的原因之一;(2)手术后CT与术前MRI融合会产生一定的融合误差,也是造成误差的原因;(3)术中脑脊液的流失和脑组织的移位,也是造成电极偏后的原因。曾经有文献报道术前设计靶点时,可以将预设靶点向前向外各移动1.5 mm,可减少电极植入的误差[8]。其中的原因猜测可能是电极在脑组织受到阻力后有一定的位移,所以术后复查CT会显示电极呈现“S”或者“C”形。
Widmann等研究报道[9]机械臂辅助下DBS植入电极的误差在1.99~3.2 mm之间。Nexframe无框架DBS手术植入电极的误差超过2.71 mm,明显高出机械臂组的误差[10]。利用立体定向框架导向脑干手术,以CT为基准图像的误差为(2.8±1.2)mm,以MRI为基准图像的误差为(3.1±1.2)mm[11]。所以,多数文献报道机械臂辅助下DBS植入的精度等同甚至高于立体定向头架[15-17]。另外有文献报道,术中采用CT或MRI复查电极位置,然后进行调整,最终计算误差值,60例患者(119根电极)的误差为(1.24±0.87)mm;采用Nexframe无框架植入DBS,CT复查电极位置,48例患者(94根电极)的误差为(0.9±0.5)mm;采用术中MRI复查电极位置,20例患者(40根电极)的误差为(0.6±0.3)mm。另外,Lannie等报道,119例患者采用机械臂辅助植入DBS电极,术中采用X线或者O型臂复查电极位置,并且所有患者术后均进行CT或MRI复查,发现两次复查结果的差异无统计学意义,表明术中的影像学检查的可靠性。本组病例采用局麻下微电极记录术中测试治疗窗方式,治疗窗数据均比较满意,故没有进行术中影像学复查。因此,如果术中有条件进行影像学复查,可以提高电极埋植的准确性,尤其是全麻下进行的手术,影像学的复查是唯一可以印证电极位置的方法。
至于评估方法,有文献[19-20]报道采用UPDRSⅢ和左旋多巴每日等效剂量(levodopa daily equivalent dose,LEDD)作为评价电极准确性的指标,这主要是从临床效果出发考虑。本研究单纯从电极设计靶点与实际靶点的差异来分析电极植入的准确度,这只是评估的标准不同而已。
有多篇文献报道机械臂辅助DBS手术,尤其是全麻下手术,可以明显缩短手术时间,减少手术室花费[7,12,14]。Jin等报道[14],全麻下气颅的体积明显小于局麻组。本研究采用生物蛋白胶封堵骨孔,术后复查CT显示颅内积气不会影响电极植入位置。本组患者的手术均在局麻下进行,而且术中进行了微电极测试和植入电极后治疗窗的测试,但没有进行术中影像学复查。所以整体手术时间并没有比立体定向头架下DBS手术时间缩短。
关于机械臂辅助DBS手术的安全性。本组患者术中术后未出现任何并发症,包括与手术相关的并发症、与刺激器硬件相关的并发症,以及短期内与刺激相关的并发症等。但因为手术病例数量较少,所以统计结果可能不具有普遍的代表性。但有文献报道此类手术的并发症的发生率与立体定向框架引导下DBS手术相似[5,7,13-17]。
DBS植入电极需要极高的精准度,以前的立体定向头架下DBS手术完全可以满足手术精度的需求;但近期机械臂辅助下DBS的植入手术应用越来越广泛,因此评估此种术式的精准度就非常必要。本研究结果表明机械臂辅助下DBS完全符合此类手术对精准度的要求。但因本研究的手术例数偏少,故此结论还需要进一步大样本的手术病例研究来证实。
猜你喜欢
肝博士(2022年3期)2022-06-30
初中生世界·九年级(2022年8期)2022-06-01
体育科技文献通报(2022年3期)2022-05-23
安徽医科大学学报(2022年4期)2022-05-12
中老年保健(2021年3期)2021-12-03
中老年保健(2021年9期)2021-08-24
世界中医药(2021年22期)2021-01-03
当代陕西(2020年24期)2020-02-01
安徽农学通报(2016年20期)2016-12-26
科技与创新(2015年2期)2015-02-11
