一种基于水声应答器的声纳系统试验方案∗
2021-11-11 14:23史磊商尚
舰船电子工程 2021年10期
史磊 商尚
(上海船舶电子设备研究所 上海 201108)
1 引言
一般地,在声纳系统研制过程中协调实际探测目标参与性能试验是不切合技术经济要求的。常规的方法是,采用与实际探测对象反射强度相符的特制球体作为被探测目标,试验船拖带目标球体模拟实际目标游速抵近声纳系统的水下基阵,声纳系统显控台实时表达目标球体在水下的综合信息,从而验证声纳系统目标探测性能。现有技术虽然解决了声纳系统目标探测试验技术经济问题,但是无疑增加了试验实施的复杂度。此外,面对恶劣水文条件或是试验船无法理想调控目标球体移动速度时,还需改用人工拖拽目标球体模拟实际目标游速。这种人工地、机械地试验方法虽可一定程度上规避试验不利条件,但是带来了人力资源的浪费,而且探测效果是否满足声纳系统性能指标要求尚需充分验证,有时甚至造成试验的失败。需要一种基于水声应答器的设计技术,水声应答器时水声定位系统的关键部件之一,它为水下待定位目标提供测试数据,应答定位信号,完成水下目标的定位[1]。通过环境噪声电平的跟踪估计和脉冲判决技术实现了复杂海洋条件下脉冲检测、回发功能[2]。该技术可代替现有试验船拖带目标球体的试验方案,根据试验条件和声纳系统性能指标,灵活设置水声应答器相关参数,模拟实际目标游速、反射强度等特征信息,配合声纳系统完成目标探测性能验证。
2 水声应答器的组成及原理
本文要解决的技术问题是现有技术方案现场实施繁琐,且极易受到恶劣水文和现场客观试验条件限制,影响声纳系统的实际探测效果。本文提供了一种基于水声应答器的目标模拟设计方法,其硬件组成框图1所示。
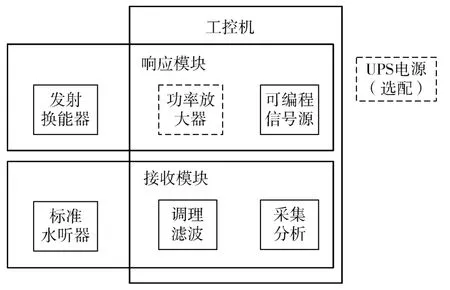
图1 水声应答器系统组成框图
如图1所示,水声应答器主要由接收模块、应答模块及工控机组成。接收模块接收主动声纳基阵发射的水下声信号,应答模块接收到的水下声信号后发还给声纳基阵,利用工控机实现水下声信号的分析显示并提供辅助指示。水声应答器在目标探测试验中的任务是为声纳系统提供声特性可调的模拟目标。水声应答器实时采集声纳基阵发射的声信号,经水听器转换为电信号后进行调理、滤波等处理,并实时分析、显示;综合声纳基阵需要接收的目标声特性,水声应答器工控机控制可编程信号源通过发射换能器发射特定声信号至声纳基阵,为水下目标探测提供辅助指示。水声应答器的工作原理框图如图2所示。

图2 水声应答器工作原理框图
依据图2所示的水声应答器工作原理,水声应答器包含声纳信号接收、应答信号发送两种信号处理流程,具体包括以下两个步骤。
步骤1 声纳信号的接收方法
水声应答器接收声纳基阵发射的信号由其接收模块承担。接收模块包含标准水听器、调理滤波单元、数据采集器、控制计算机。由标准水听器采集水下信号,经滤波放大处理后进行信号的采集记录,根据声纳信号发射的信号形式,工控机控制界面设置对应的信号参数,滤除水下声场环境中非必要信号,拾取符合工控机参数设置的声信号并由数据采集器转换成电信号后写入工控机缓存,进行时域、频谱等示波监测。水声应答器接收声纳信号的流程如图3所示。

图3 水声应答器接收声纳信号的流程图
步骤2 应答信号的发送方法
水声应答器应答声纳基阵并发还模拟目标信号由其应答模块承担。应答模块包含发射换能器、可编程信号源、功率放大器及工控机。水声应答器应答信号的发送流程如图4所示。
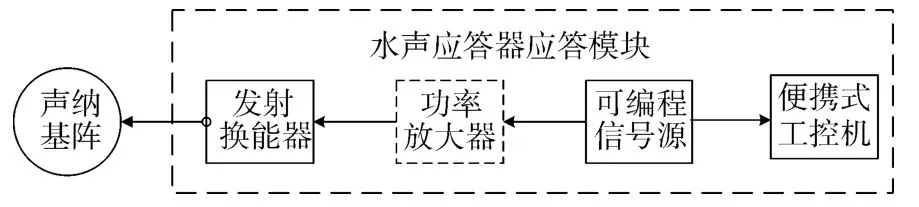
图4 水声应答器应答信号的发送流程图
依据工控机设置的频率、信号类型、脉宽等信号形式和参数,可编程信号源发出与声纳基阵一致的声信号,经功率放大后由发射换能器转换为水下声信号发还给声纳基阵,为声纳探测性能提供模拟目标。特别地,针对被动声纳系统,水声应答器工控机可设置被动声纳系统目标探测所需的信号形式,将水声应答器作为水下声源使用,亦可作为被动声纳系统探测性能试验的模拟目标使用。
3 水声应答器的设计实现
水声应答器代替现有人工式地声纳系统目标探测试验方法,优化实施方案,提高对声纳系统探测性能的验证水平。水声应答器的设计实施需要以满足声纳系统探测试验技术指标为依托,综合设备组成及工作原理,遵从模块化、标准化等设计原则,开展设计、集成、调试、验收等实施内容。水声应答器具体配置见表1。
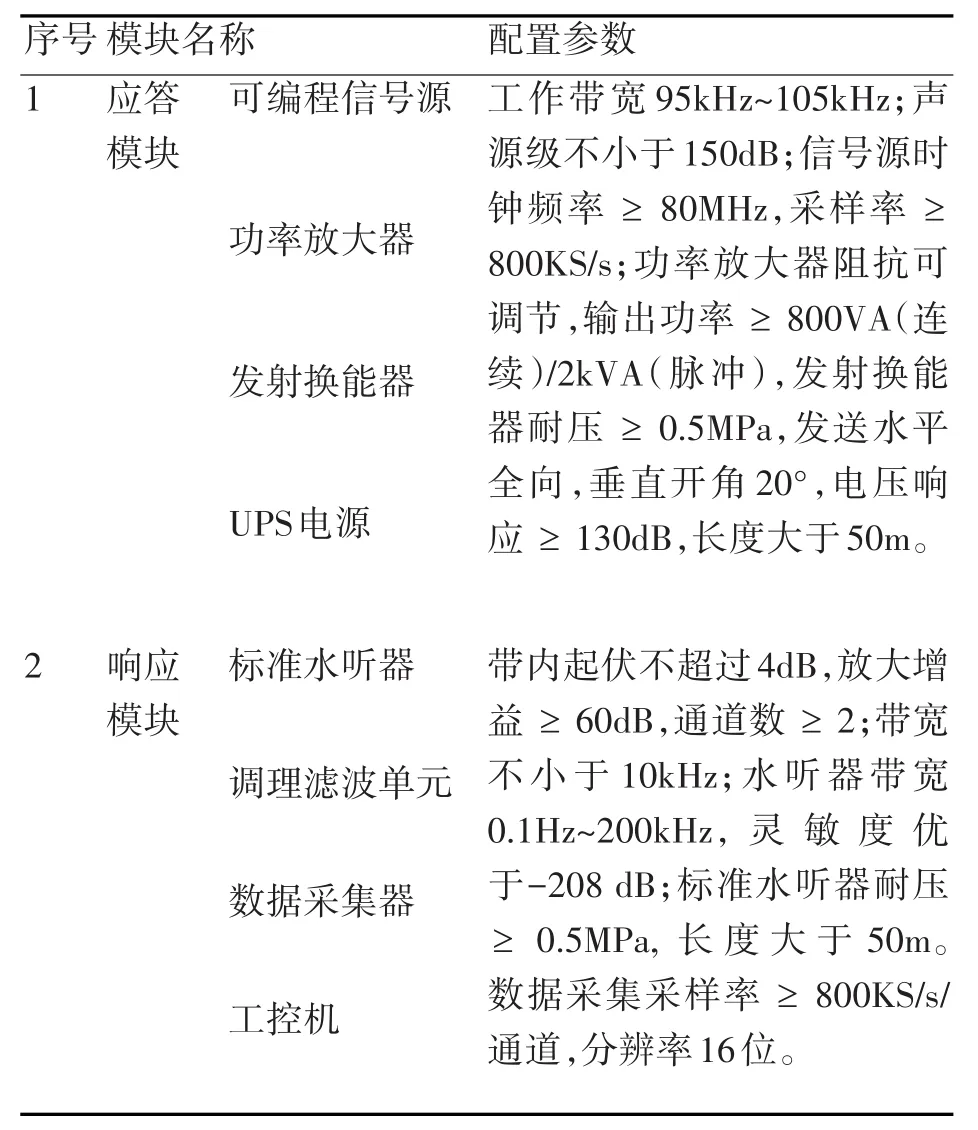
表1 水声应答器具体配置表
应答器的工作模式有两种,应答模式和响应模式。响应模式为常用工作模式,应答模式则是应答器不需接受响应信号触发,直接等时间间隔的发射信号,作为模拟源使用[3],声纳被动接收并实现定位。
1)应答模块
一般地,水声发射机是应答器的重要组成部分,同样也是系统耗电量最大的部分,其性能优劣直接影响到应答器系统的作用、工作时间和系统性能[4],故水声应答器中加入UPS电源作为常备供电系统。选取水平全向,垂直开交不小于20°的水下声源作为发射换能器应答信号的发射装置。发射换能器的性能主要表现在提高低频宽带换能器的发射声功率和提高中高频发射换能器的工作带宽两个方面[5]。结合不同源级的使用需求,灵活选用不同发射响应指标的换能器。选取的发射换能器的发射响应不小于130dB。可编程信号源利用数据采集器PXI-6120上自带的DAC数模转换功能,实现对特定频率、信号类型、脉宽等信息的电信号模拟输出,输出信号的幅值范围-10V~+10V,结合发射换能器发射响应指标,输出的声信号的最大源级为150dB左右。
考虑应答信号最大源级的提升需求,除优先选取发射响应更大的换能器外,也可选配阻抗可调的,输出功率 ≥800VA(连续)/2kVA(脉冲)的功率放大器作为提升发射源级的备选方案。
此外,实际使用时,放置断电等意外情况,选取市面常用的三相220V UPS电源作为应答器布放在无电力条件的机动小船时供电模块备份方案,UPS电源转换效率89%,切换时间小于2ms,MTBF大于25万小时,满载最大工作时间可达24h,具备过热、过欠压、短路、抗雷击浪涌等保护功能。
2)响应模块
鉴于水声应答器的上位机软件设计采用虚拟仪器技术,故考虑采用数据采集器完成模数信号转换。数据采集器本身将模拟输入通道、信号调理电路、采样/保持、A/D转换以及控制逻辑单元的时钟、总线接口和控制器集为一体,从而形成一个完整测量系统的硬件电路[8]。数据采集器采用美国国家仪器(NI)公司标准数据采集板卡PXI-6120实现对声纳系统发射信号单通道信号采集功能。该采集板卡具备4通道差分模拟输入,单通道采样频率≥800KS/s,可满足对水听器拾取到的不同中心频率电信号的采集,差分输入形式抗干扰能力强,可有效抑制采集过程中电路内部的自噪声。
控制计算机采用便携式工控机作为应答器终端显示控制设备。工控机基于嵌入PXI-6120及调理滤波单元的考虑而形成,机构紧凑,平台共有6个支持PXI总线槽位,其中CPU占两槽,PXI/CPCI板卡最多支持插入4块,可提供定制型的接口适配器,满足中短时使用需求。平台还集成了12.1寸LCD液晶显示屏及键盘,满足现场试验便携式使用要求。
3)接口设计
作为应答器信号采集、终端显示、参数控制的工控机模块,需具备与发射换能器、标准水听器及数据采集器和调理滤波单元等互连接口。其中发射换能器和标准水听器采用标准BNC物理接口实现与工控机互连;PXI-6120数据采集器及调理滤波单元通过工控机支持的PXI总线实现数据传输功能,PXI总线数据位宽可达64bit,峰值数据吞吐率可达264MB/s。
4)软件设计
应答器的上位机显示控制软件采用NI公司标准图形化开发语言LABVIEW完成。该语言包含的工业控制方面的工具包极多,函数丰富,非常适用于与硬件接口的编程控制,尤其擅长数据采集功能[9]。通过其自带的函数和驱动程序工具包,在上位机软件界面上容易实现对信号的实时采集、显示,时域、频域信号的特征提取,加入多普勒频移功能结合图像亮度图显示可直观地对响应及应答信号进行监测。上位机软件的主要功能是在简答应答或自测阵模式下,实现对询问脉冲的检测,并通知MCU发送应答信号。上位机通过RS232串口设置、修改、返回MCU系统参数等[10]。
4 试验方案及测试分析
水声应答器作为辅助测试的水声设备,它通过接收并快速检测声纳发射信号,延时或无延时转发声信号,为声纳提供目标指示。在实际湖试、海试环境下,将多个应答器布放在声纳观察范围中,检验声纳观察范围指标;在跟踪目标试验中,应答器应答声纳信号,为声纳提供可跟踪目标[11]。基于本文的水声应答器设计方法,结合声纳系统目标探测性能,配合声纳系统开展了水声应答器距离、方位、精度及延迟测距功能的验证,这些性能是声纳系统的重要指标,直接影响到水面舰船对来袭目标的判别,进而决定了其对来袭目标的防御效果[12],因此,基于水声应答器的声纳系统性能验证包含测距、测向及延迟模拟不同距离目标,具体包括以下三个步骤。
步骤1 作用距离及精度的测试方法
在对声纳系统开展目标探测性能试验时,需要对水声应答器作为模拟目标可被声纳系统探测到的作用距离及精度进行测试。水声应答器测距时与声纳系统连接布放示意图如图5所示。试验需要声速梯度仪、GPS和试验小船配合完成。作用距离及精度的测试步骤如下。

图5 水声应答器测距时与声纳系统连接布放示意图
1)试验前确认水声应答器及声纳设备是否工作正常;
2)测量水文,记录特定声场范围内的声速;
3)试验船上在换能器及水听器下水处固定GPS信标,应答器水下换能器下端固定铅鱼,两者相距0.5m,在距离声纳基阵10m处将换能器及水听器与声纳基阵等深布放,布放深度由测得的水文条件确定;
4)声纳设备与水声应答器开机工作,声纳显控台探测水声应答器的应答信号,待显控台发现目标后,水声应答器关机停止工作,声纳界面上目标消失,此时,可确认水声应答器应答信号;
5)试验船开始从距离声纳基阵10m处拖带水声应答器向远处驶离,拖带速度 ≤1m/s(模拟实际目标的游速);
6)在整个拉距过程期间,通过GPS导航定位,在驶离过程中,每间隔30m,记录GPS距离与显控台发现的目标距离信息,待显控台探测目标消失时,记录最大探测距离;
7)比对GPS距离与显控台探测目标距离信息,计算测距精度。
8)调整声纳基阵和水声应答器水下换能器和水听器的深度,重复以上步骤,测试结果表2所示。
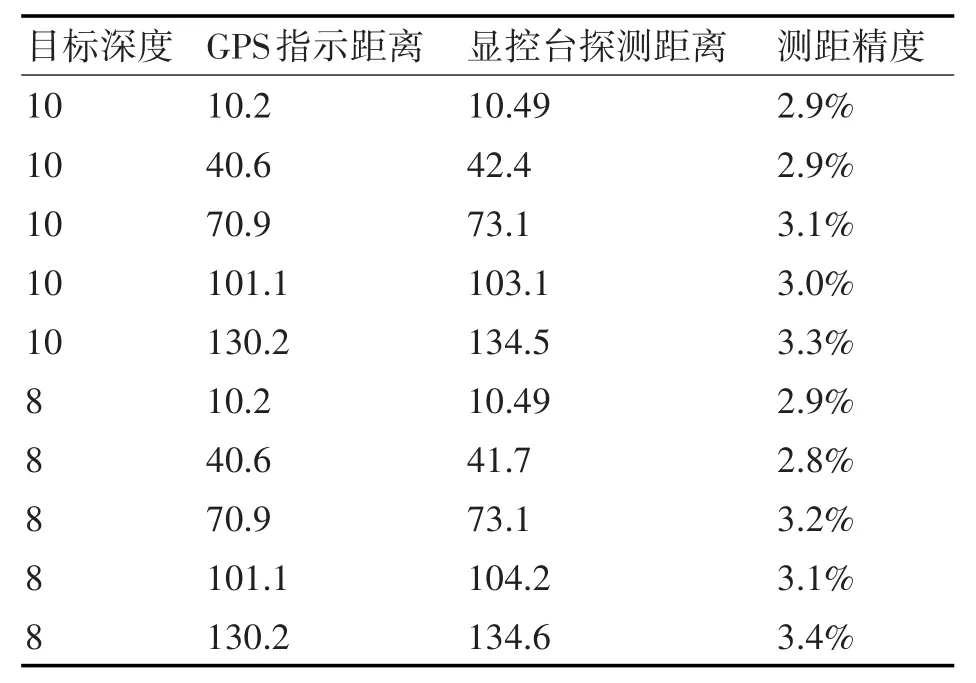
表2 水声应答器测距及精度测试结果(单位:m)
步骤2 测向方位及精度的测试方法
相同地,在对声纳系统开展目标探测性能试验时,还需对水声应答器作为模拟目标可被声纳系统探测到方位和精度进行测试。水声应答器与声纳系统测向时连接布放示意图如图6所示。

图6 水声应答器与声纳系统测向时连接布放示意图
试验仍需声速梯度仪、GPS和试验小船配合完成。测向方位及精度的测试步骤如下。
1)试验前确认水声应答器及声纳设备是否工作正常;
2)测量水文,记录特定声场范围内的声速;
3)试验船上在换能器及水听器下水处固定GPS信标,应答器水下换能器下端固定铅鱼,两者相距0.5m,在距离声纳基阵10m处将换能器及水听器与声纳基阵等深布放,布放深度由测得的水文条件确定;
4)声纳设备与水声应答器开机工作,声纳显控台探测水声应答器的应答信号,待显控台发现目标后,水声应答器关机停止工作,声纳界面上目标消失,此时,可确认水声应答器应答信号;
5)试验船开始从距离声纳基阵10m处拖带水声应答器至距离声纳基阵Xm处,拖带速度 ≤1m/s,记录此时GPS提示的和显控台录取的方位信息;
6)以Xm为半径,试验船改变航向向下一个测试点行驶,到达测试点后,记录GPS提示的和显控台录取的方位信息,测试结果如表3所示。

表3 水声应答器方位及测向精度测试结果(单位:°)
步骤3 水声应答器模拟不同距离目标的测试方法
水声应答器作为模拟目标进行探测距离测试方案中,水声应答器需要试验小船慢速拖带,模拟实际目标的移动态势。设计了一种延时测距方法,将水声应答器放置与试验小船上距声纳基阵Xm处不变,实时接收声纳基阵的发射信号,依据水下声速,设置相应的延时后产生应答信号发还给声纳基阵,用于实现不同距离上模拟目标的产生。水声应答器模拟不同距离的目标的测试步骤如下。
1)试验前确认水声应答器及声纳设备是否工作正常;
2)测量水文,记录特定声场范围内的声速;
3)试验船上在换能器及水听器下水处固定GPS信标,应答器水下换能器下端固定铅鱼,两者相距0.5m,在距离声纳基阵10m处将换能器及水听器与声纳基阵等深布放,布放深度由测得的水文条件确定;
4)声纳设备与水声应答器开机工作,声纳显控台探测水声应答器的应答信号,待显控台发现目标后,水声应答器关机停止工作,声纳界面上目标消失,此时,可确认水声应答器应答信号;
5)试验船距离声纳基阵100m处静止,水声应答器开机工作,记此时GPS提示的距离信息作为基准距离;
6)依据100m基准距离,依据需要模拟不同距离的目标,计算需要延迟的时间,水声应答器设置不同延迟时间工作,记录各种延迟时间下的GPS提示值并勘误模拟测距误差,测试结果如表4所示。

表4 水声应答器延时模拟测距功能结果(单位:m)
5 结语
本文提出了一种用于声纳系统目标探测性能试验的水声应答器的设计技术,可代替现有人工辅助试验方法,设备布放简单,操作便捷,可克服恶劣水文条件及负面试验条件的影响,最大程度模拟实际目标信息。参数设置灵活,显示界面清晰,可实时进行波形观测与数据处理。降低声纳系统试验的实施复杂度,具备广阔的应用前景。
猜你喜欢
电子技术与软件工程(2022年9期)2022-07-09
导航定位学报(2022年3期)2022-06-10
广东教学报·教育综合(2022年45期)2022-05-05
火力与指挥控制(2021年8期)2021-09-08
考试与评价·八年级版(2020年5期)2020-10-29
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
电脑知识与技术(2016年21期)2016-10-18
印刷技术·数字印艺(2015年7期)2015-08-31
现代电子技术(2015年5期)2015-03-31