
丘陵山地果园智能运输小车减振结构优化设计*
2021-11-10 02:29:22戚得众郭林阮晓松闫行行
中国农机化学报 2021年10期
戚得众,郭林,阮晓松,闫行行
(1. 湖北工业大学,武汉市,430068; 2. 湖北省农业机械工程研究设计院,武汉市,430068)
0 引言
传统丘陵山地果园大多是采用人力的方式来运输果品,由于农村劳动力的缺失,劳动力的价格不断增高,山地智能运输车应运而生,对降低果园运输成本具有重要意义,但目前山地智能运输车存在减振性能差,果品损伤严重等问题。要想改变现状,需对丘陵山地智能减振小车的减振系统进行优化。
运输小车减振系统一般为被动减振,被动减振研究主要从两方面进行,一方面对减振结构进行研究,徐新喜等[1]对履带式卫生急救车的振动控制进行了研究,发现两级减振较单级减振,减振效果有很大的提高。Shen等[2]提出一种ISD悬架结构,该结构能够在一定程度上提高悬架的性能。李小彭等[3]对传统的单级ISD悬架系统进行改进,设计出一种双级ISD悬架系统,该系统具有更好的低频减振性能。另一方面对减振系统的控制进行研究,迟媛等提出一种适用于轮式拖拉机的主动悬架减振系统,该主动悬架系统较传统被动悬架系统减振效果提高27%。滕绯虎[4]提出一种适用于履带装甲车的半主动悬挂系统并进行仿真,仿真结果表明半主动悬挂减振性能优于全扭杆悬挂和装有减振器的扭杆悬挂。
诸多学者对履带车辆及农用车辆减振进行相应研究[5-13],取得不错成果,但没有针对丘陵山地履带运输车进行减振研究。为提高丘陵山地履带运输车的性能,对其减振性能研究迫在眉睫。首先进行理论分析,设计出一种适用于丘陵山地果园运输车的二级减振结构,进行减振性能仿真分析,确定山地智能运输小车的减振结构。
1 模型构建
1.1 丘陵山地果园路面构建
路面性能可以通过路面不平度来进行评价,当车速稳定时,路面不平度符合高斯概率分布,且具有零均值的平稳均态特性,可通过功率谱密度(PSD)来描述。国标GBT 7031—2005对其有明确的规定,具体如表1所示。
对于已知路面等级的道路可以通过谐波叠加法和白噪声法两种不同的方法去生成路面时域不平度,可采用基于功率谱密度的谐波叠加法,利用MATLAB编程生成路面时域不平度。
南京农业机械化研究所的徐竹凤等对果园不平度进行了研究,最后通过测量得出了丘陵山地果园的路面等级在C级到D级之间。针对山地智能运输小车的使用场景,以北方的苹果园为例,选择C级路面。当小车以1 m/s的速度行驶在C级路面,MATLAB生成路面不平度如图1所示。
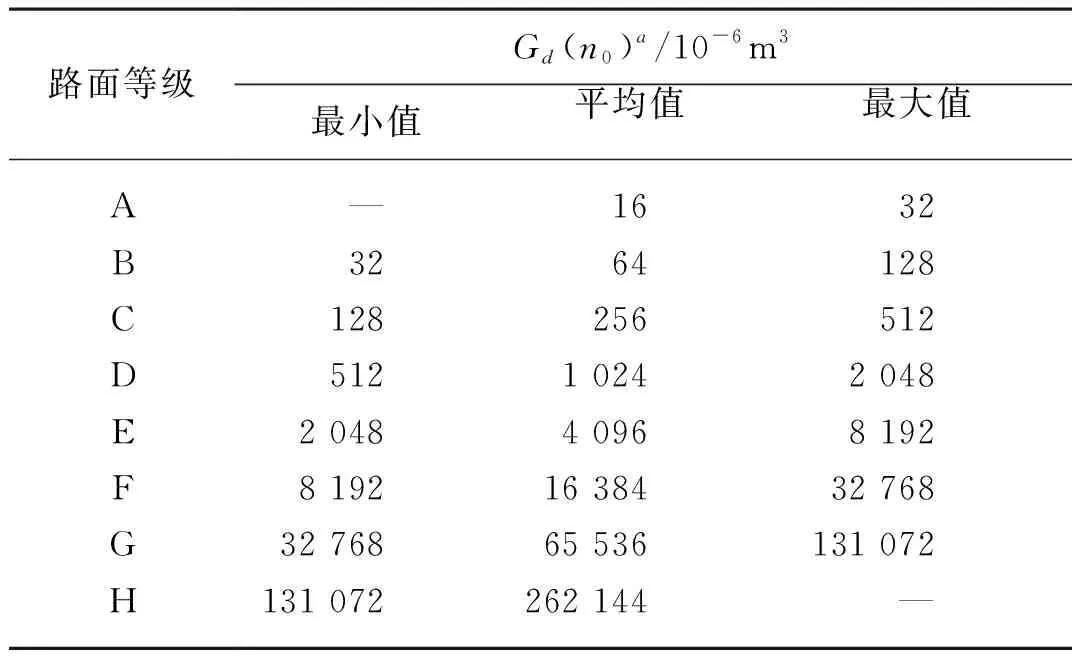
表1 路面不平度分级标准Tab. 1 Grading standards for road roughness
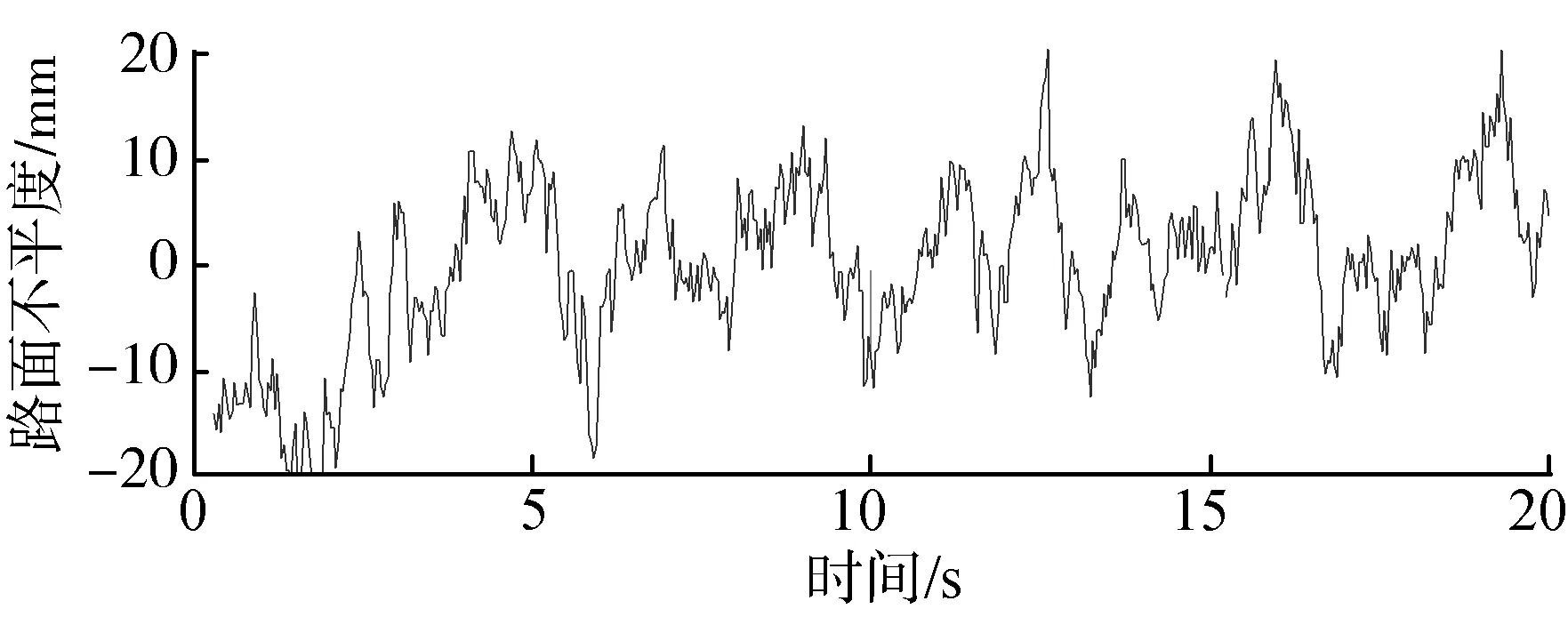
图1 丘陵山区果园路面不平度Fig. 1 Road roughness of orchards in hilly andmountainous areas
1.2 减振系统模型构建
在车辆行驶过程中由于路况的变化,车轮会与路面产生碰撞,从而产生振动。假设车辆以匀速在的道路上行驶,当遇到路面突起时,车轮与突起部分产生碰撞,如图2所示。忽略碰撞时的能量损失,由动量守恒定律有
MV1=MV2
(1)
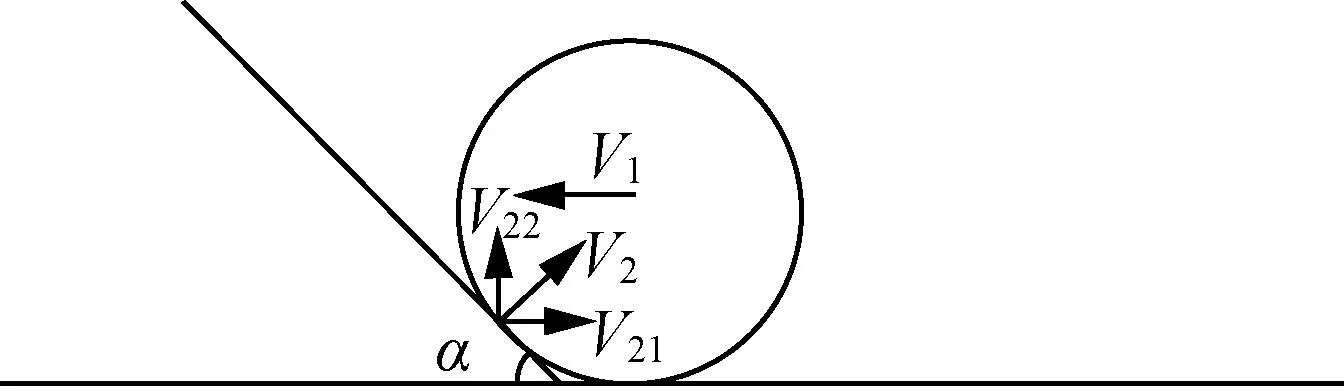
图2 车轮路障碰撞示意图Fig. 2 Wheel barricade collision diagram
M为车辆总质量,V1为碰撞前车辆的速度,V2为碰撞后车辆的速度。其中V1和V2的大小相等但方向不同。
设α为碰撞接触点所在平面与道路水平面间的夹角
(2)
(3)
V21的方向与V1的方向相反,V22的方向与V1的方向垂直,V21的大小与α的大小成正比,V22的大小与α的大小成反比。F21和F22分别为车辆在V21、V22方向的受力。α取值范围为0°~90°,丘陵地区一般不超过25°,车辆丘陵地区行驶于路面发生碰撞时会受到F21和F22两个不同方向的力,且这两个力存在一定的比例关系,在设计减振结构时也应同时考虑。
传统单自由度的智能运输小车悬架模型如图3(a)所示,忽略支重轮的重量和刚度,悬架的刚度与阻尼为定值。图中m为车身质量,由车架和果箱组成,k1代表悬架刚度,c1代表悬架的阻尼,z1代表在路面激励下车身位移,q代表路面不平度函数。
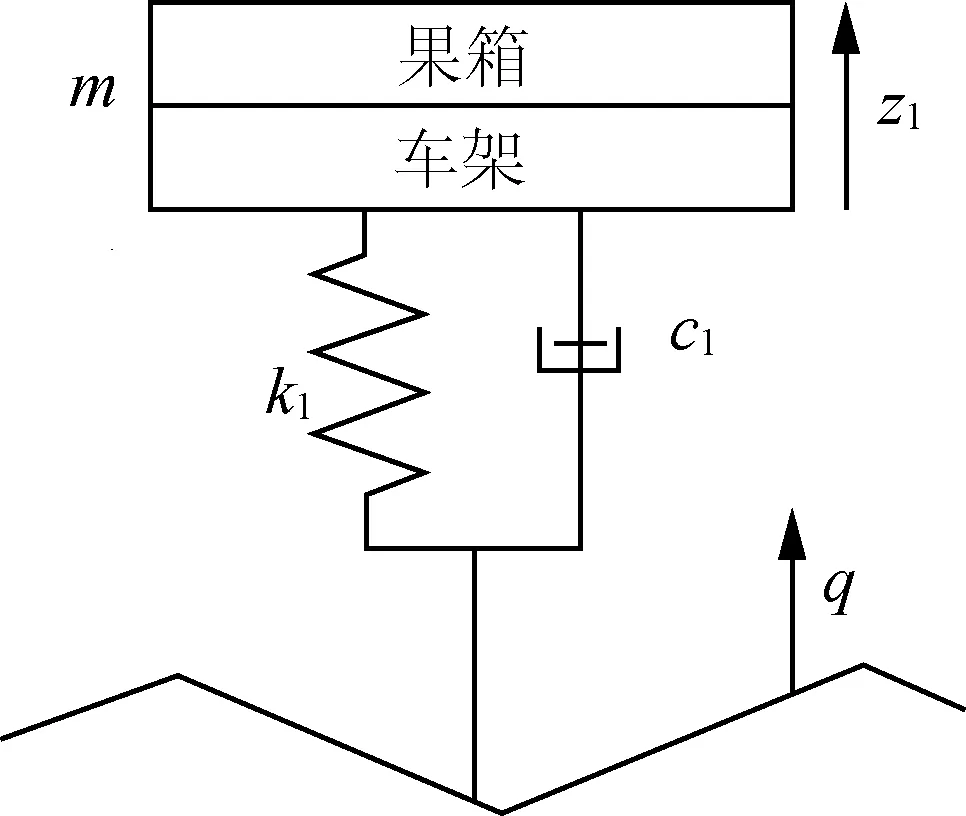
(a) 单自由度悬架
(b) 二自由度悬架图3 悬架模型图Fig. 3 Suspension model drawing
忽略车轮变型,车轮位移等于路面不平度,图3(a)所示悬架系统的运动微分方程
(4)
悬架系统的激励路面不平度函数q随时间变化且无规律,为非周期性函数。可以将q看成一系列脉冲的作用,分别求出系统对每个脉冲激励的响应,将它们叠加起来,就得到系统对路面不平度激励的响应。系统对脉冲激励的响应可以反应系统的振动特性。
系统对0时刻单位脉冲激励下的响应
(5)
其中:
令系统达到最大超调量Mp(第一次到达极值点)的时间为tp,有
(6)
tp的大小决定悬架系统响应的变化速度,从而决定了车身的受力大小。对于刚性连接系统来说,系统达到Mp的时间与脉冲的宽度dτ相同,在非极端情况下tp大于dτ。悬架系统对脉冲激励具有一定的减缓作用,可以将变化急剧信号转化为平缓信号。
2 减振系统设计优化
可通过对悬架系统的结构和参数进行优化来增大tp以达到提高减振性能的目的。
2.1 结构优化设计
对减振结构进行优化,智能运输小车的簧上部分由车架和果箱组成,路面的激励通过悬架传递到车架,车架再将激励传递给果箱,在单自由度悬架模型中车架和果箱间是刚性连接,果箱的加速度响应与车架的加速度响应相同。针对智能运输小车提出一种新的减振结构,将车架和果箱间的刚性连接改为柔性连接,即在车架和果箱间添加相应的减振结构,采用两级减振。
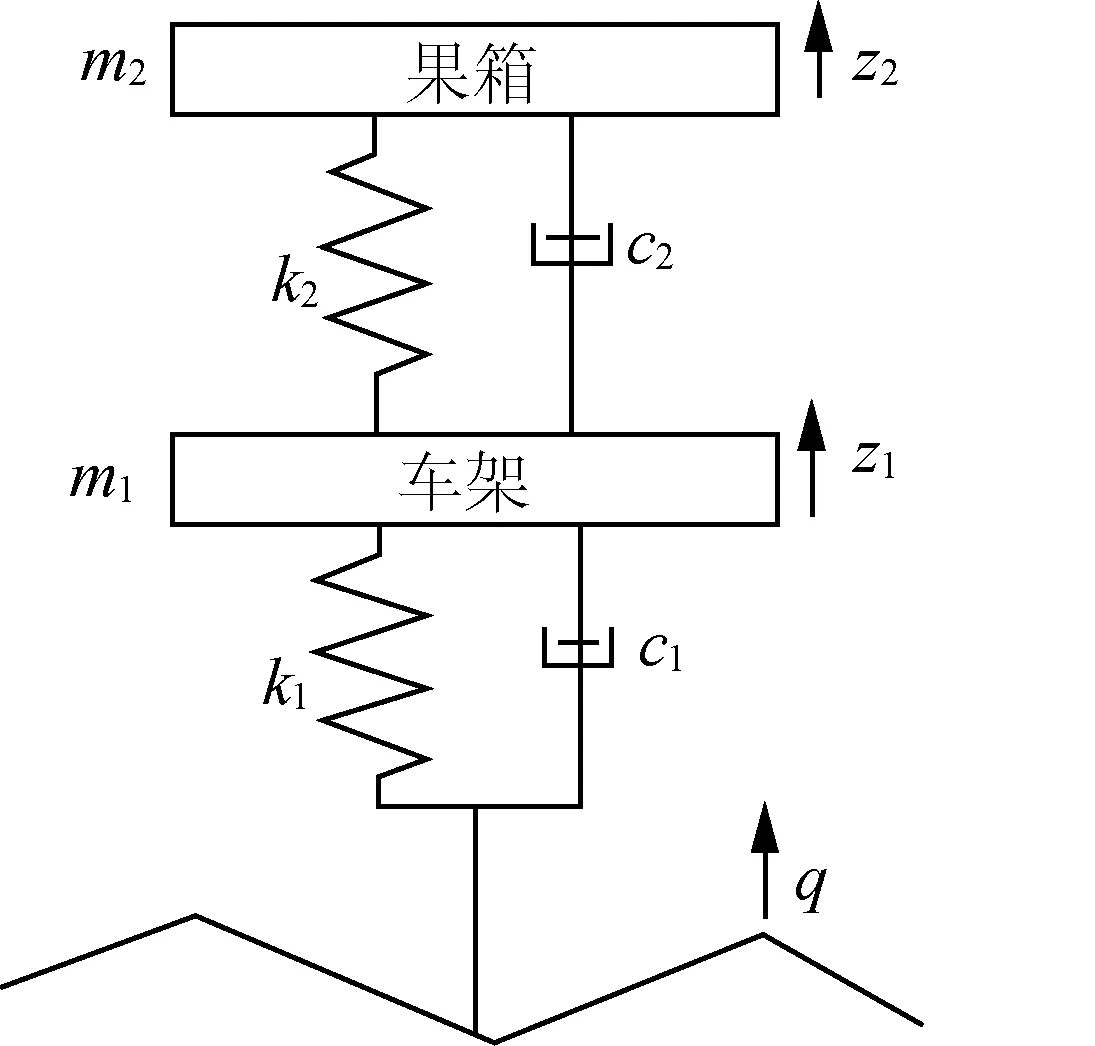
二自由度的智能运输小车悬架模型如图3(b)所示,忽略支重轮的重量和刚度,m1、m2分别代表车架质量和果箱质量,k1、c1分别代表车架与车轮间减振结构的刚度和阻尼,k2、c2分别代表车架与果箱间减振结构的刚度与阻尼,z1、z2分别代表再路面不平度激励下车架和果箱的位移。图3(b)所示悬架系统的运动微分方程
(7)
借助MATLAB/Simulink模块对方程进行求解,Simulink模型如图4所示。
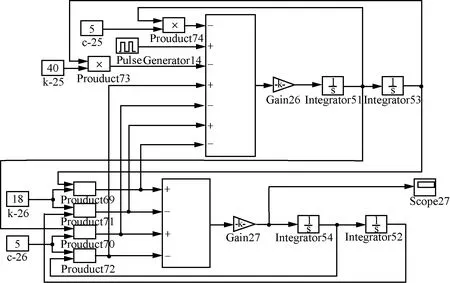
图4 Simulink模型图Fig. 4 Simulink model diagram
以脉冲信号作为激励,单级减振悬架系统与两级减振悬架系统的果箱幅值响应如图5所示。

图5 不同减振结构果箱幅值响应图Fig. 5 Amplitude response of fruit box withdifferent vibration damping structures
图5中两级减振悬架系统果箱的tp大于单级减振悬架系统果箱的tp,tp越大果箱幅值响应变化速度越小,加速度越小,果箱内果品受力越小,即在脉冲激励下二级减振系统的果品损伤率小于一级减振系统的果品损伤率。
传统履带车辆多采用扭杆悬架进行减振,扭杆悬架可以等效为Z向、X向的两根弹簧减振器组合而成,可以同时对Z向和X向的激励进行减振。扭杆悬架具有结构简单、占用车体空间小、弹性和可靠性好等优点,选择扭杆弹簧作为一级减振结构元器件。二级减振结构参考汽车座椅减振系统进行设计,适用于丘陵山地果园智能运输车二自由度减振结构如图6所示。
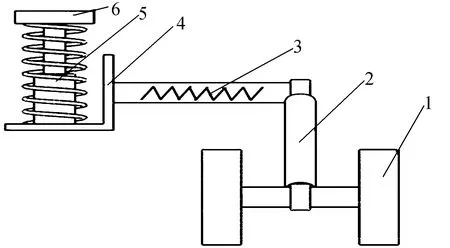
图6 运输车二级减振结构示意图Fig. 6 Diagram of secondary vibration dampingstructure of transport vehicle1.支重轮 2.平衡肘 3.扭杆弹簧 4.车架5.弹簧减震器 6.果箱
2.2 结构参数优化设计
以果箱加速度响应幅值为衡量指标对二自由度系统的二级减振结构参数进行分析,令


(a) 加速度响应与刚度关系图
(b) 加速度响应与质量比关系图
(c) 加速度响应与阻尼关系图图7 零初始条件下悬架系统在脉冲激励下响应图Fig. 7 Response diagram of suspension system under impulse excitation under zero initial condition
3 仿真分析
3.1 动力学模型构建
采用ADAMS/ATV模块进行多体动力学仿真分析。半车动力学模型如图8所示,相关参数如表2所示。

图8 运输车半车动力学模型Fig. 8 Dynamics model of transport vehicle and half vehicle
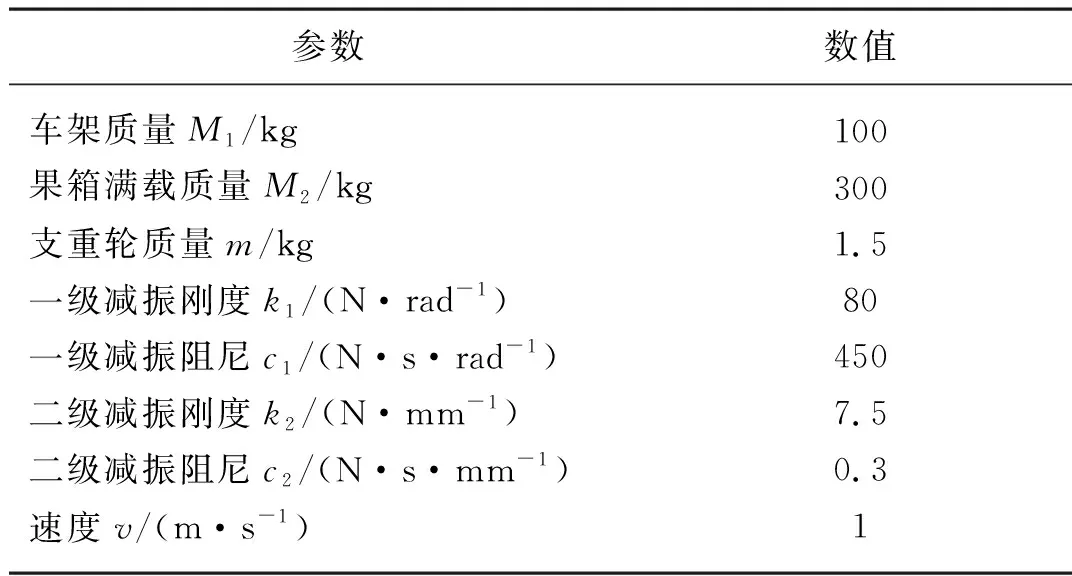
表2 运输车相关参数值Tab. 2 Relevant parameter value of transport vehicle
3.2 结构优化前后仿真结果及分析
对三种不同的减振结构进行仿真分析,其中结构a和结构b分别采用扭杆悬架和非独立式悬架,均为单级减振结构,结构c采用二级减振悬架。
山地智能运输小车采用三种减振结构以1 m/s的速度,在构建的c级路面上行驶20 s,果箱X向的加速度和Z向的加速度响应如图9所示。其中结构a与结构c在X向减振结构相同,仿真结果中X向加速度基本一致,因此图9中无结构a在X向加速度响应图。
对山地智能运输小车在不同减振结构下X向的加速度进行分析,数据如表3所示。

(a) 采用结构a在Z方向加速度响应图
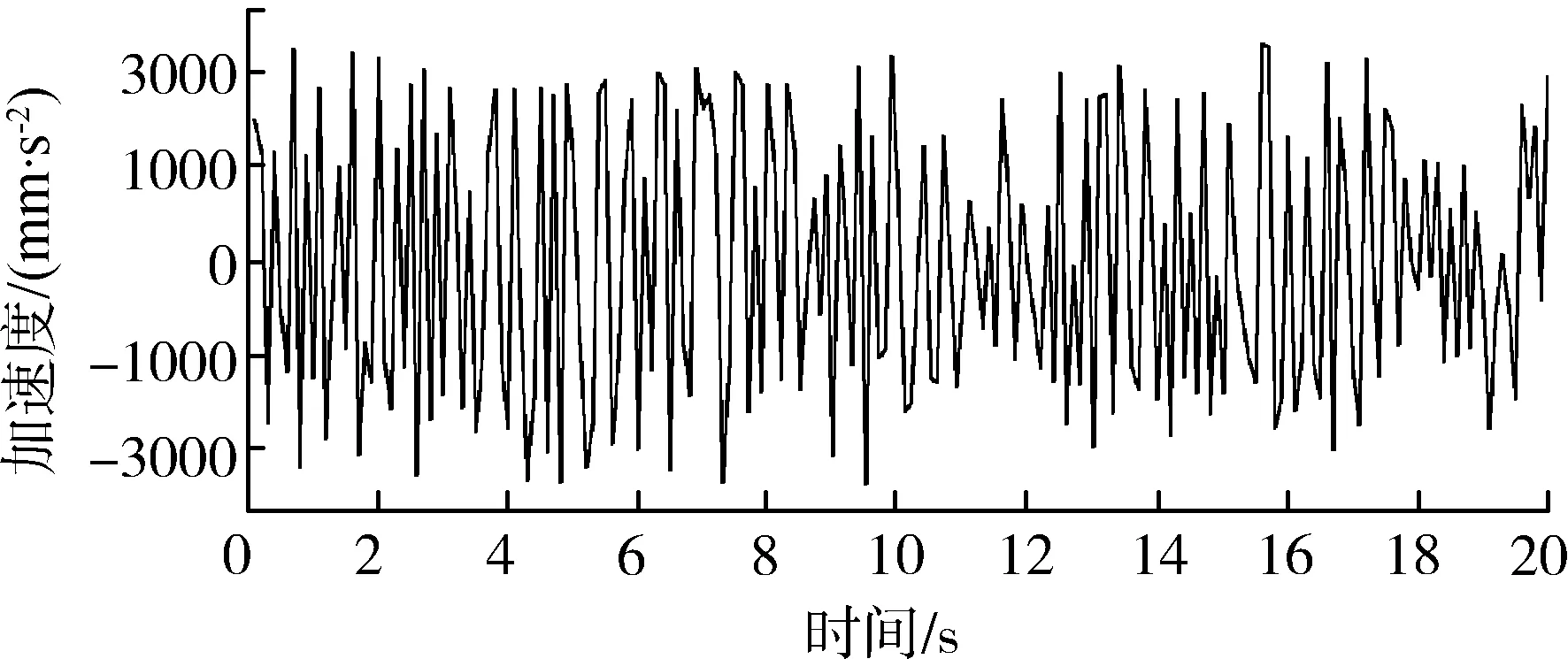
(b) 采用结构b在X方向加速度响应图
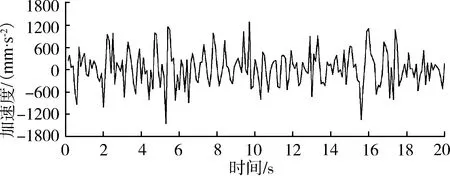
(c) 采用结构b在Z方向加速度响应图
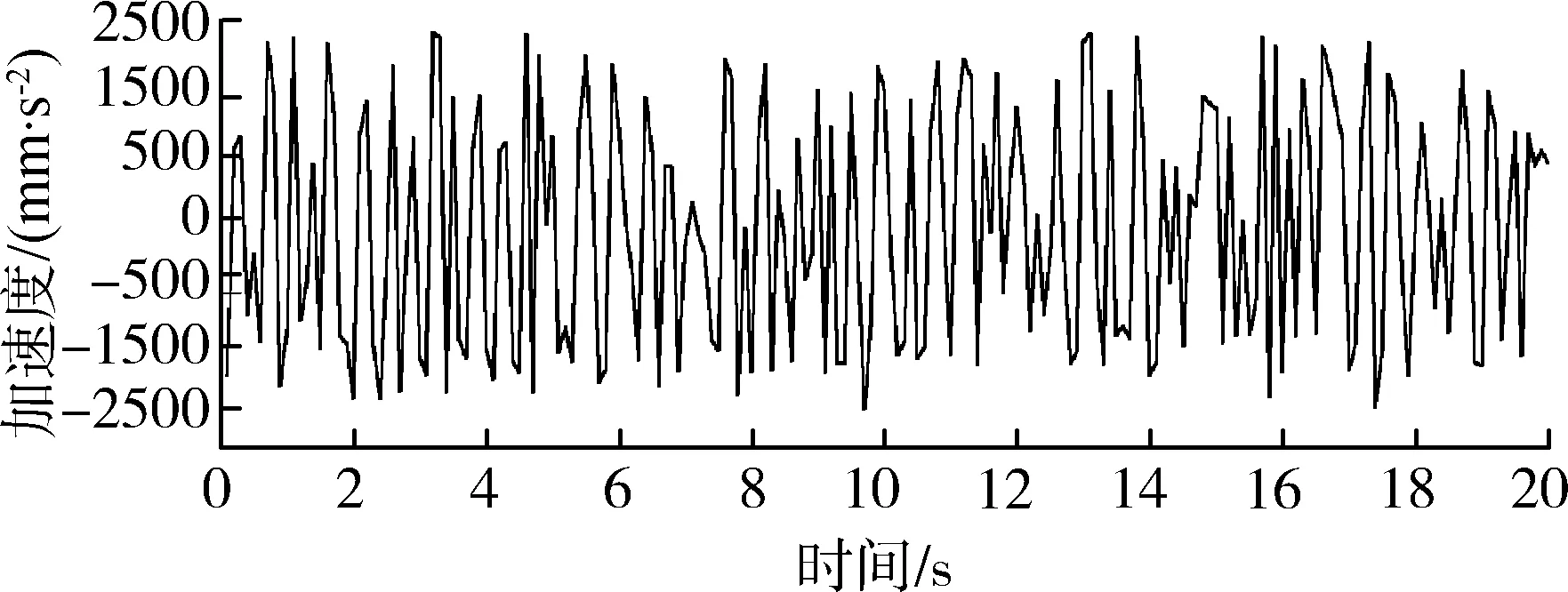
(d) 采用结构c在X方向加速度响应图

(e) 采用结构c在Z方向加速度响应图图9 不同结构加速度响应图Fig. 9 Acceleration response diagram ofdifferent structures
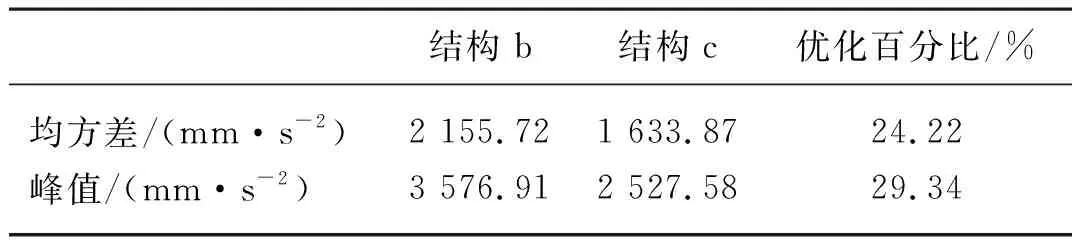
表3 X向数据对比Tab. 3 X direction data comparison
结构a与结构c都采用了扭杆悬架,扭杆悬架可以等效为X向和Z向弹簧减振器的组合,在X向具有一定的减振性能,而结构b在X向没有任何减振措施,因此结构c与结构a在X向较结构b减振效果更好,减振性能优化24.22%。
对山地智能运输小车采用不同减振结构下Z向的加速度进行分析,结构a、结构b与结构c的Z向加速度的峰值和均方差如图10所示,优化效果如表4所示。
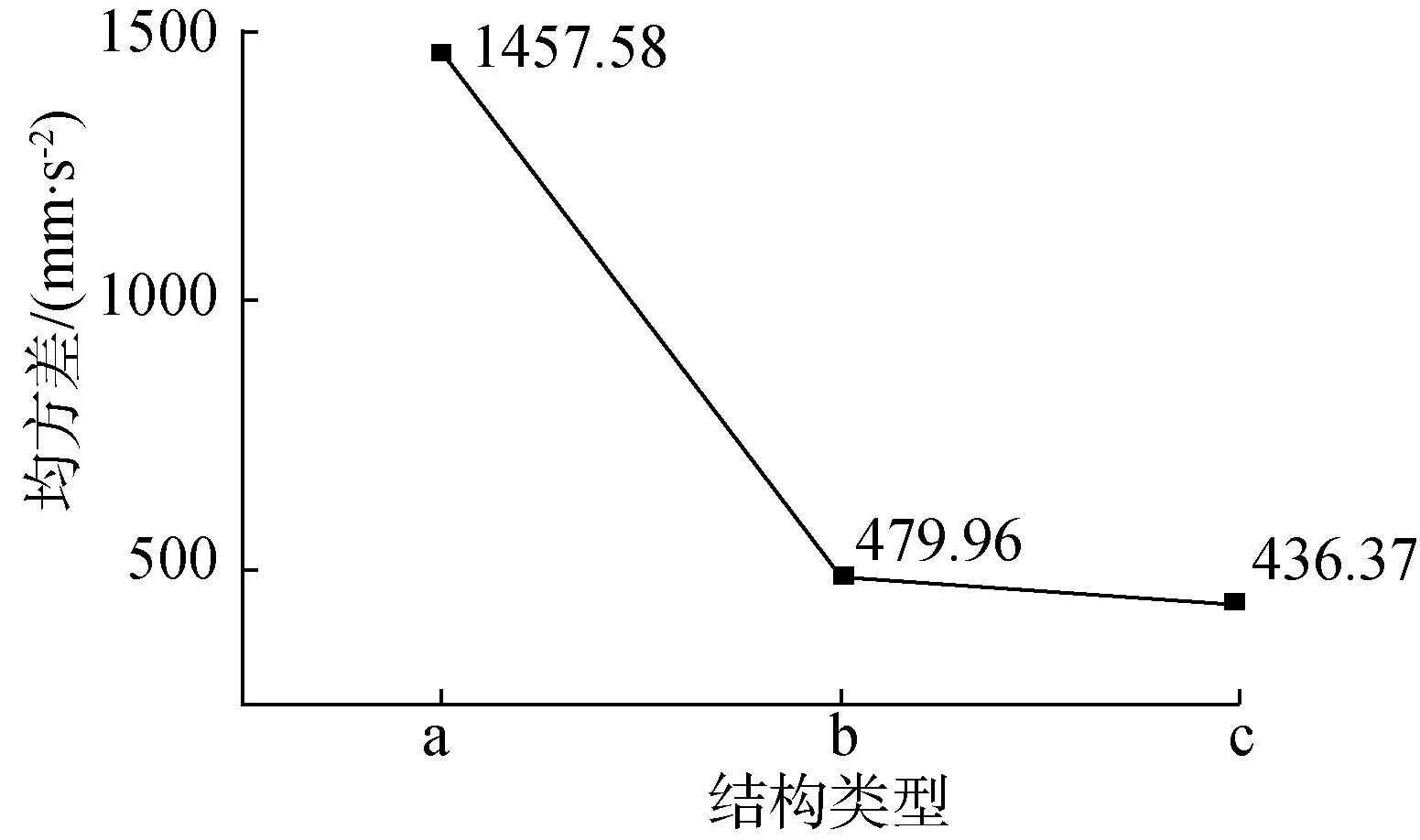
(a) Z向加速度均方差

(b) Z向加速度峰值图10 Z向优化效果对比图Fig. 10 Z direction optimization effect comparison diagram
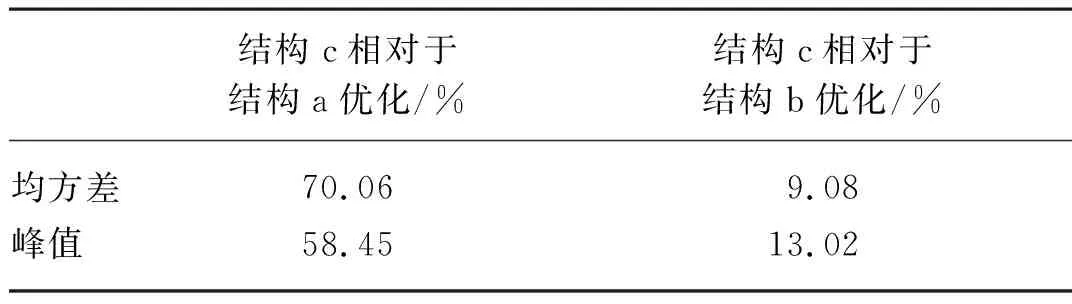
表4 Z向加速度响应数据对比Tab. 4 Z direction acceleration response data comparison
结构c相较于结构a,峰值优化了82.18%、均方差优化了76.75%;相较于结构b,峰值优化了24.89%、均方差优化了9.08%。结构a在Z向减振性能由扭杆悬架提供,单向减振性能一般;结构c采用两级减振较结构a和结构b的单级减振可在一定程度上增大tp,使果箱运动更加平缓。
3.3 不同参数仿真结果及分析
对结构c的k2、μ和ξ2三个参数进行优化,由2.2节可知,适当增大μ和ξ2,适当减小k2均可提高运输车的减振性能,μ和ξ2的值受M1和c2的影响,最终确定对k2、M1和c2进行优化,优化前后参数如表5所示。
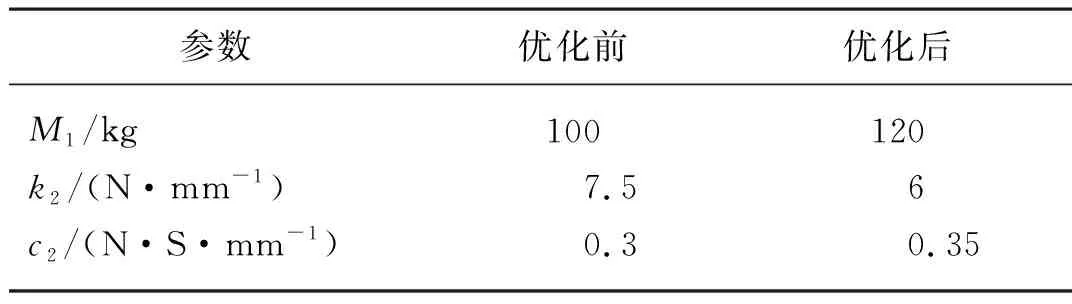
表5 优化前后参数Tab. 5 Parameters before and after optimization
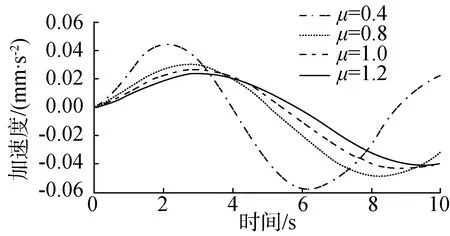
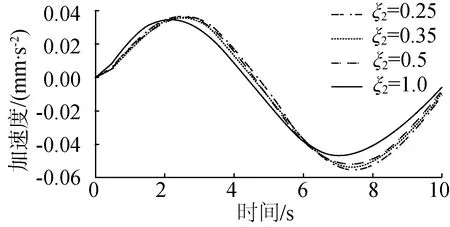
优化后的结构c仿真结果如图11所示。此次优化是针对Z向减振进行一定的优化,故只对Z向的仿真结果进行分析对比。
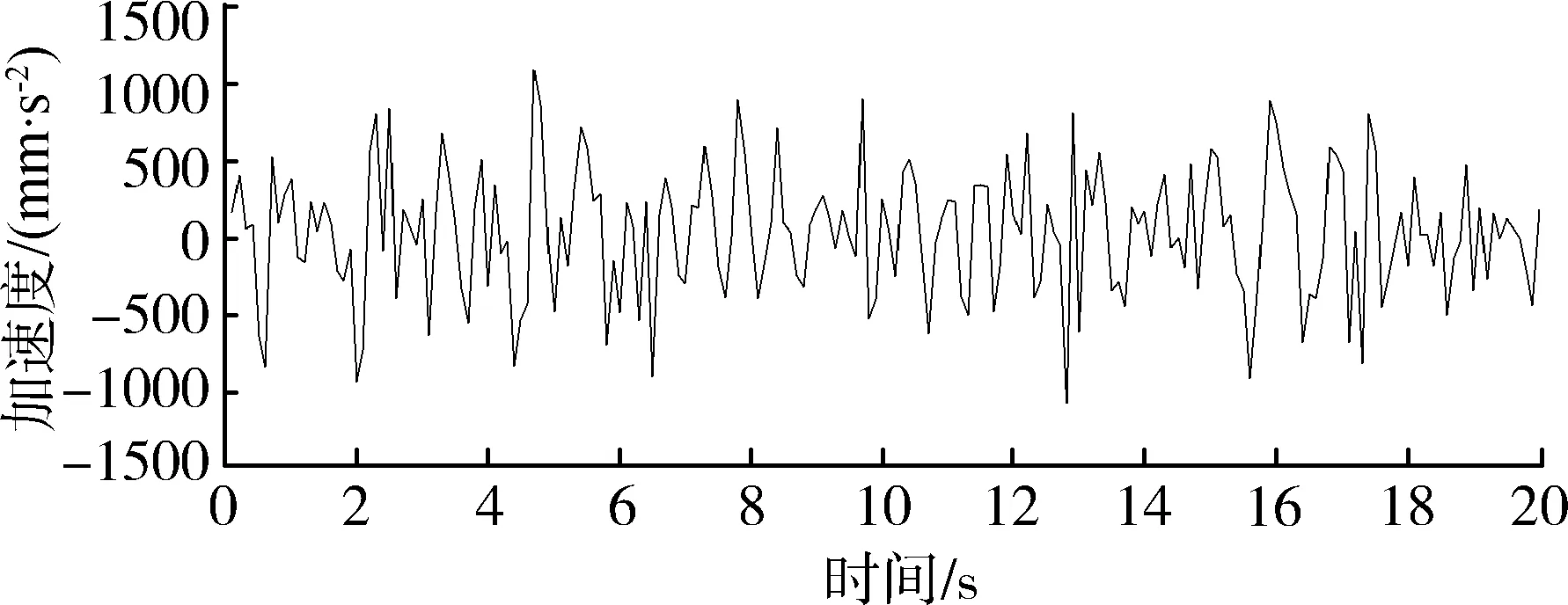
图11 优化后果箱Z向加速度响应图Fig. 11 Optimized consequence box Z-directionalacceleration response diagram
优化前后Z向仿真结果均方差对比如下表6所示。

表6 Z向优化前后数据对比Tab. 6 Comparison of data before andafter Z-directional optimization
优化后的Z向加速度均方差和峰值分别较优化前提高了7.1%和11.5%,对结构c的k2、μ和ξ1三个参数进行优化可以有效的增大tp,使果箱在受到路面激励后运动更加平缓,果箱内果实受力更小,以减小果实损伤。
通过ADAMS动力学仿真可得出结论:在Z向加速度均方差和峰值及X向加速度均方差和峰值4个方面,两级减振悬架性能均优于或等于单级减振悬架;在适当减小k2及增大μ和ξ1后的悬架性能优于原悬架性能,具有良好的稳定性。
4 结论
1) 构建丘陵山地果园的路面模型,并对山地智能运输小车的减振结构进行理论分析,设计出一种适用于丘陵山地履带运输小车的两级减振悬架。
2) 通过Adams动力学仿真具体分析了采用不同减振结构的运输车在c级路面以1 m/s的速度行驶时的减振性能,仿真结果表明二级减振悬架在X向和Z向都具有良好的减振效果,对比单级减振悬架Z向和X向减振性能分别优化9.08%和24.22%。
3) 以二级减振悬架为基础,进一步优化了山地智能运输车的减振结构的相关参数,参数优化后的悬架减振效果较优化前提高7.1%,后续研究将会做进一步改进。研究结果证明了该减振结构的正确性和合理性,能够有效的改善智能运输小车的减振性能,从而降低果品在运输过程中的损伤,并对履带小车的减振结构的研究提供了一定的参考。
猜你喜欢
青海草业(2022年2期)2022-07-23 09:34:58
农业知识(2021年19期)2021-10-16 10:14:18
小哥白尼(军事科学)(2019年5期)2019-08-27 00:44:06
乡村地理(2018年3期)2018-11-06 06:50:54
乡村地理(2018年4期)2018-03-23 01:53:48
青岛画报(2017年12期)2018-02-06 13:06:38
商周刊(2017年22期)2017-11-09 05:08:38
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
汽车维护与修理(2014年10期)2014-02-28 12:15:00
