
基于机器视觉的灯时自适应模糊控制系统
2021-11-10 05:27:16胡小敏孙佩
电子设计工程 2021年21期
胡小敏,孙佩
(西安交通工程学院,陕西西安710000)
随着城市人口密度和车流量的增大,城市交通面临着更大的挑战。其中,城市交通路口的车流通行状况是影响交通堵塞最为重要的因素之一。传统的路口交通灯时控制多为固定的定时控制,红绿灯时固定不变,无法适应变化的车流,路口的通行能力无法充分发挥,造成交通资源的浪费,降低了城市交通的运行效率[1]。为提升交通路口的车流通行效率,提出了一种基于机器视觉的灯时模糊控制器设计方案,利用获取的路口车流图像,对车辆进行轮廓差分捕获,提取车流量信息,将其作为模糊控制器的输入,通过模糊推理输出自适应的绿灯时长,实现灯时的优化控制。
1 系统方案及硬件设计
灯时智能模糊控制器设计的整体方案如图1所示,系统在十字路口的4 个方向分别配置一个高清摄像头,用于实时采集车流量图像,利用图像处理算法对图像中的车辆信息进行提取,辨别出各车道中的车辆数目,将其作为输入量,进行模糊推理,模糊控制器输出红绿灯的控制时长,达到灯时优化控制的目的,提高路口车辆通行效率[2]。图像处理算法和模糊控制算法运行于核心处理器中,核心处理器选用STM32F407 芯片,该芯片主频为168 MHz,片内FLASH 空间大小为1 MB,可满足图像缓存与识别算法以及模糊控制算法的运算速率要求[3]。图像前端探测器获取的图像数据输入至处理器中,通过处理器中集成的图像处理算法,分离估计出车流量数据,利用车流量估计数据进行模糊推理运算,推算出最优红绿灯时分配时间,控制器依据输出的分配灯时控制各路口红绿灯的延长时长和数码管的计时时间。

图1 系统硬件结构图
图像采集选用OV2460 摄像头模块,该模块可实现对路口图像数据的采集和存储,配置了百万级高清的CMOS 图像传感器,模块灵敏度强、像素分辨率高,输出格式支持JPEG 格式。另外,该图像采集模块具备自动曝光、白平衡、色彩调节、对比度调节等功能,最高像素可达1 600×1 200[4]。图像模块采用3.3 V 供电,可与控制器选用相同电源供电,降低了供电系统的复杂度。另外,每个路口同时配置红绿灯和数码管,作为灯时控制的输出端,控制车流的输出。
以双向六车道十字路口为例,交通路口主要控制参数包括信号周期、相位、流量比、绿信比、平均车辆延误等。其中,信号周期是指绿色、黄色、红色信号灯依次点亮的时间之和,其数值大小决定单周期内车辆的通行能力。相位是指路口同一时间段内,单个方向或多个方向获得通行的权利[5-6]。不同路口可根据实际通行情况进行不同相位划分,选取典型的四相位分布,其中第一相位为东西方向直行,第二相位为东西方向左右转,第三方向为南北方向直行,第四方位为南北方向左右转。灯时优化的目标即是通过车流量的识别和模糊推理,合理控制信号周期内各个相位的绿灯通行时间,达到车辆高效快速通行的目的。
2 车辆轮廓差分图像识别
灯时控制的前提条件是对车道待通行车辆数目的识别与估计,图像识别流程图如图2所示。首先需要对原始图像进行灰度化处理,相机获取的原图像为RGB 格式的彩色图像,为便于图像处理,需对图像进行灰度变换处理,将RBG 格式转换为YUV 格式,转换公式为[7-8]:
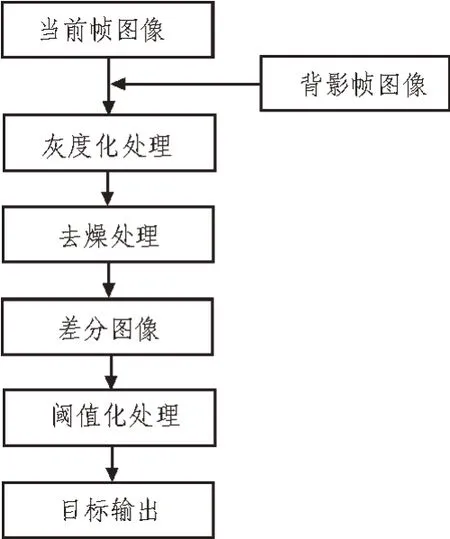
图2 基于背景差分法的识别流程

其中,R表示像元的红色值,G为像元的绿色值,B为像元的蓝色值,Y为进行灰度转换获得的像元灰度值。
然后对图像进行去噪处理,由于环境影响和传感器自身元器件原因,相机获取到的原始图像中一般伴有白噪声,在进行目标识别前需对图像进行去噪滤波处理,以降低噪声干扰。选用33 滑动窗口,将图像数据与高斯滤波器进行卷积运算,选用1/16模板系数对图像进行去噪预处理[9-11]。
常见的运动目标图像识别方法可分为光流法、帧差分法和背景差分法等[12]。其中,光流法主要利用的是像元的亮度运动产生的光流,需要精确计算出光流场才能保证识别的准确性,而实际环境中受光源扰动、障碍物遮挡等多种复杂因素影响,很难保证解算的可靠性和准确性。帧差分法主要是利用相邻两帧图像间的相对运动产生的像移以及相邻两帧的差值进行判断,通过比较差值与设定的门限阈值,获取目标的运动轮廓。该方法仅对目标的运动部分敏感,很难提取目标整体轮廓,且局限于运动目标的识别,无法识别静态目标,由于路口车辆一般运动速度较低,无法很好地适应该环境。
背景差分法的主要原理是首先从多帧图像中综合出背景图像,将获取的实时图像与背景作差。需要利用连续采集的N帧图像进行背景提取,背影提取公式可表示为:

其中,E()代表模型算子,模型算子的选择对背影帧的提取有很大影响,较常见的方法为中值法、均值法、高斯法、高频极值法等[13]。其中,中值法相比其他方法,可降低边界模糊,且运算复杂度低,可提高运算实时性,更适应于交通路口的背影环境。
将当前帧与背景帧进行差值运算,取差值的绝对值作为差分帧,公式为:

式中,Ik(x,y)表示第k帧实时图像,Dk(x,y)为差值运算获得的差分帧。最后对差分帧进行二值化,将差分帧与阈值进行比较,公式为[14-15]:

当像素的灰度差值大于阈值T时,二值化结果取1,反之取0,最终提取出图像中的车辆目标,提取结果如图3所示。
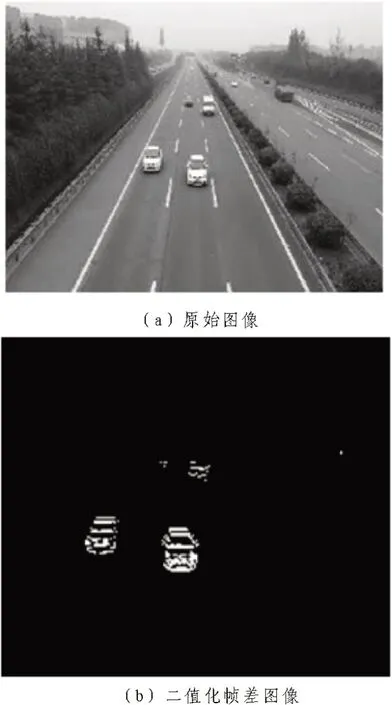
图3 背景差分提取结果
3 模糊控制器设计
由于城市交通路口的通行控制是一个复杂且随机多变的问题,很难进行精确建模和控制,十字路口车流吞吐量属于模糊概念,与模糊控制理论较为吻合。模糊控制不需要对控制对象进行精确建模,采用数学语言对控制策略进行描述,其控制框架如图4所示,主要分为模糊化、模糊推理、清晰化三部分[16]。其中,模糊化主要是将输入量转换为模糊域的量值,即将实际通行车辆准确数目转换为模糊量。模糊推理是模糊控制器的核心部分,通过模糊规则推理,输出控制结果。清晰化的目的是将模糊结果转化为具体的时延数据。模糊控制器具有两个输入量G和R,G表示当前正在通行相位上的车辆数目,R为其他等待相位上的车辆数量。一个输出量T表示当前通行相位的绿灯时延长度。
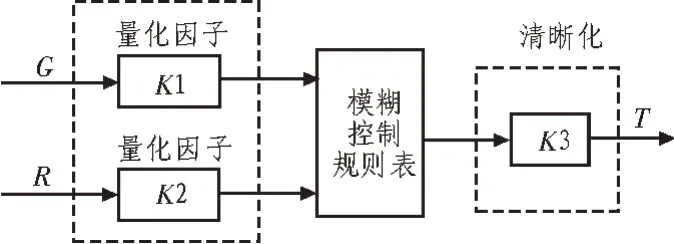
图4 模糊控制器结构图
3.1 模糊输入设计
首先需要对输入量进行模糊化处理及论域变换,将具体车辆数目转换至模糊论域。路口相机的监测距离约为150 m,车辆平均占据的距离约为5 m,单车道最大识别的车辆数目为30 辆[17]。设定两个输入量G和R的论域为{0,1,2,…,30},为简化模糊控制规则,取量化因子为0.5,则论域映射为{0,1,2,…,15}。设定量化因子的目的是当输入分布不合理时,不需要对模糊控制器进行修正,仅需要调整量化因子就能调整逻辑推理权重,提高系统适应性。
通过综合分析,将输入量划分为7 个等级,分别为VS(极少)、S(很少)、SR(少)、M(中等)、LR(多)、L(很多)、VL(极多)[18]。论域到模糊语言的转换关系主要是利用隶属函数,隶属函数包括三角分布、梯度分布、S 形分布、正太分布等,结合十字路口车辆通行实际情况,采取三角分布和梯度分布混合型隶属函数,输入量隶属函数分布如图5所示。
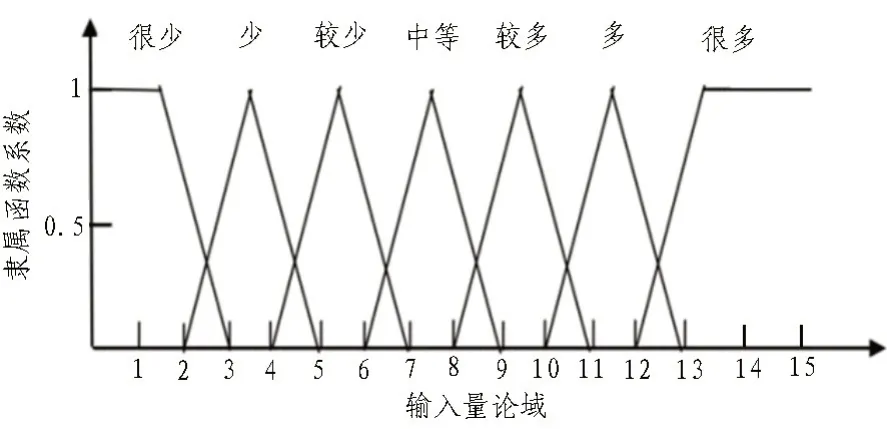
图5 输入量隶属函数分布
3.2 模糊输出设计
模糊控制器输出量T表示该相位路灯时延长度,其取值范围对车辆通行状况影响很大,过短则不能保障车辆的有效通行,过长则易使车辆驾驶员产生急躁情绪。假定路口最小绿灯通行时间设定为15 s,最大绿灯时间为45 s,路灯相位最大变化量为30 s,基本论域则为1~30,将输出比例因子设定为2,则输出量T的论域为{0,1,…,15}。输出量T的模糊语言同样设定为7 个等级,分别为VS(很短)、S(短)、SR(较短)、M(中等)、LR(较长)、L(长)、VL(很长)[19]。隶属函数选择三角函数和梯度函数混合型隶属函数,输出量隶属函数关系如图6所示。
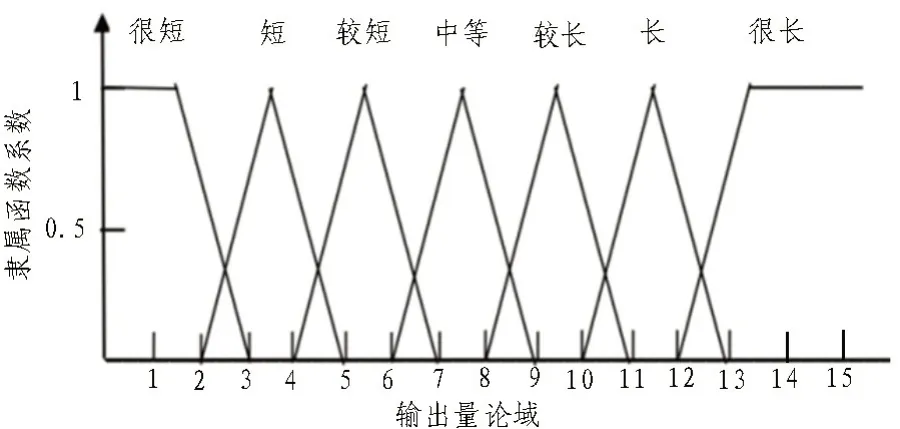
图6 输出量隶属函数关系
综合十字路口视频监测数据和交警实际指挥经验,给出模糊控制规则。通过模糊规则推算出模糊输出量,再利用重心法实现输出清晰化,得到最终具体的绿灯时延T值。
4 仿真结果
依据车辆平均延时指标对比定时控制和模糊控制两种方案的车辆通行效率。车辆平均延误时长是指一段时间内通行车辆等待的总时间与通行车辆总量的比值,是评价路口车辆通行效率的重要指标之一[20]。仿真流程如图7所示。
模糊控制和定时控制两种方法的平均延时统计结果如图8所示,由统计结果可知,在车流量较低时,两种控制方案均能很好地实现车流控制,车辆平均延误时间较短,两种方案的差异较小。当车流量逐步增加,模糊控制的车辆平均延误明显小于定时控制,当车流量较大时,模糊控制表现出了明显优势。
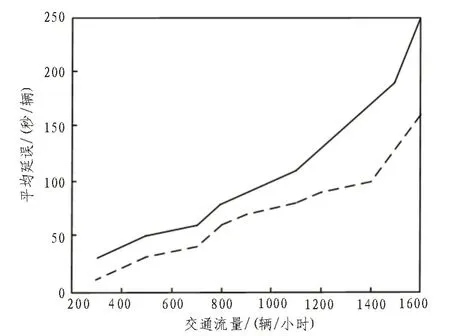
图8 模糊控制和定时控制平均延时结果对比
5 结 论
提高路口车流通行效率对缓解城市交通堵塞具有重要作用,故实现交通灯时智能化自适应控制具有重要工程价值。将图像识别技术与模糊控制相结合,实现灯时的在线实时调整,对降低路口车辆等待时长具有明显效果。可对单点交通路口控制方案作进一步研究,将其扩展至整条线路甚至交通网络的灯时控制,有望实现整个城市交通网灯时的优化控制,这可作为进一步的研究方向。
猜你喜欢
科技创新与应用(2024年8期)2024-03-25 03:24:54
人民黄河(2023年9期)2023-09-12 04:24:26
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
商品与质量(2020年38期)2020-11-06 06:50:08
当代水产(2020年2期)2020-03-17 06:57:06
中国保健营养(2019年1期)2019-10-21 09:54:49
测控技术(2018年10期)2018-11-25 09:35:52
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
机械制造文摘(焊接分册)(2014年4期)2014-03-20 13:57:40
