
城市快速路入口匝道交通信号模糊控制算法
2021-11-10 11:29贵舒玥何烈云金石磊
交通科技 2021年5期
贵舒玥 何烈云 金石磊
(浙江警察学院交通管理工程系 杭州 310053)
城市快速路对改善城市交通状况,缓解市中心交通阻塞现象,提高城区与郊区的通达度发挥重要作用。但随着车流量的增长,快速路匝道口处逐渐发展成新的交通结点,大大降低了快速路作为城市快速交通的作用。快速路匝道拥堵很有可能引发其他相接道路的继发性拥堵,最终导致整个路网的通行效率降低。
目前国内外对于快速路匝道控制主要采用信号灯控制法,在匝道进出快速路的位置安装信号灯,通过传感器收集交通数据,采用各类控制模型和算法实行信号控制[1]。Tian Z.Z.等[2]主要通过调节道路信号灯周期和相位调整进入匝道的车辆,以流量-容量比值为标准,对低、中、高3种不同交通需求情况下的自适应信号控制使用Vissim仿真对比。G.R.Iordanidou等[3]使用宏观动态交通流模型作为城市快速路仿真的过程模型,并将其分为路段模型、节点模型和排队模型三部分进行研究。唐辉等[4]分别建立主路和辅路的交通流模型和匝道与交叉口排队模型,对主路辅路的协同控制问题进行探索;并考虑以总通行时间最短为目标的优化策略。尹胜超等[5]在其研究中基于自适应和信号配合控制策略,提出几种具体的匝道控制方法。以瓶颈区域通行能力提高为指标,进行了仿真实验。方传武等[6]详细比较了几种常见匝道信号灯控制方法的适用条件和优缺点。王世明[7]分析了快速路匝道控制的几种常用方法的优缺点,在此基础上提出“可接受间隙控制”方法。莫阳[8]从分析出入口特性出发,寻找匝道及变速车道控制参数的影响因素,解析匝道设计速度对匝道交通流率影响机理,并研究控制参数。周浩等[9-10]构建可变限速控制影响下的微观METANET模型,对入口匝道进行优化控制,实现了两者的协同优化。除理论研究外,国内外对于快速路的控制正落向实处:美国已建成2 000余处匝道入口信号灯控制系统;济南市部分道路建立了自适应控制信号灯,如果十字路口车辆或行人的通行需求较大,信号灯能够感应并进行反馈,相应延长或缩短本信号灯周期绿灯时间。
目前模糊控制理论在交通控制领域主要运用在城市道路平面交叉口交通信号控制及高速公路匝道控制方面,针对城市快速路匝道交通控制研究较少。快速路主路与入口匝道交汇区同样是一个受各种因素影响变化的复杂系统,因此本文采用模糊控制方法进行研究。
1 快速路匝道模糊控制模型构建
模糊控制理论来自于Zadeh创立的模糊数学,为控制复杂、不明确的系统提供了新的解决方法。它以模糊集合论、模糊语言变量和模糊逻辑推理为基础,对过于复杂或难以精确描述的系统进行计算机数字控制。其最初应用于锅炉和蒸汽机的温度控制,取得良好效果。
1.1 模型构建
本文模糊控制系统见图1,模糊控制器是其中最重要的部分。

图1 模糊控制系统结构示意图
通常用6个数据反映快速路交通情况:US上游车速,UO上游车辆占有率,DS下游车速,DO下游车辆占有率,RO匝道车辆占有率,RL匝道等待车辆总长度。空间占有率指在某一特定时刻,在一个特定区域内,已被车辆在地面投影占有的道路量与区域内道路总量的比率,计算如式(1)所示。
(1)
式中:Rs为匝道空间占有率;L为观测路段总长度,参照杭州上塘高架大关匝道检测器设置位置,本文两检测器之间距离为125 m,即取L=125 m;Li为第i辆车的长度;n为该路段的车辆数。检测器分布见图2。
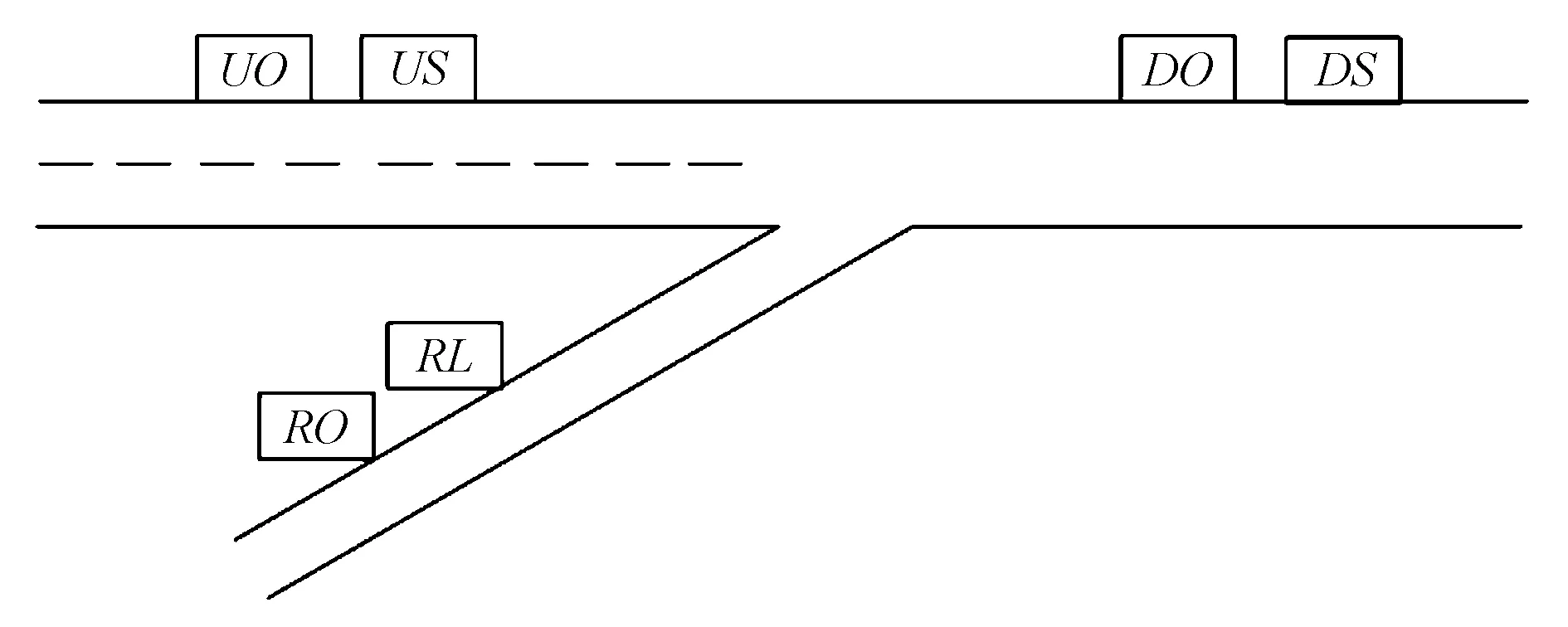
图2 入口匝道和检测器分布示意图
经过与现有数据整合分析,选取上游车辆占有率UO和匝道等待车辆长度RL作为模糊控制器输入量;输出量为绿灯延长时间ΔG,即本信号灯周期内绿灯时间增加或减少值。输入量每120 s更新1次。以下是模糊逻辑控制器的构建流程。
1.2 输入与输出变量模糊化
将UO和RL的值分别划分为5个模糊子集,在每个模糊子集中使用VS、S、M、L、VL表示“很小、小、中等、大、很大”。绿灯延长时间设为NB、NS、NE、ZN、ZE、ZP、PO、PS、PB9个模糊子集,代表负大、负小、负、零负、零、零正、正、正小、正大。以RL为例,根据检测器测得数据,将RL取值范围[RLmin,RLmax]划分为以上5个模糊子集,其取值范围即为上游车速的论域。假设RLmin=0,RLmax=100,该子集的隶属度函数见图3。

图3 隶属度函数图
通过测距得该匝道长度为400 m,即匝道等待车辆总长度极值为400 m,定义RL的论域为[0,80,160,240,320,400]。陈玉思[11]根据2002年版的《城市道路交通管理评价指标体系》,依据城市主干道平均行程速度描述道路交通运行状况,取占有率为0.28,0.39,0.52划分主干道畅通、轻度拥挤、拥挤和严重拥挤。本文定义道路占有率论域为[0,0.28,0.39,0.52,0.8,1]。
1.3 模糊规则的设计
模糊规则建立在语言变量的基础上,是模糊控制器知识库的核心,模糊规则的正确性与数量也直接影响模糊控制器的控制效果。基础的模糊规则形式为:IF A then B,经过对比筛选,建立25条规则见表1。

表1 模糊控制规则表
以RL是VL、UO是VS为例,此时匝道排队等待车辆长度很长,上游车辆占有率很小,表示匝道拥挤而主路交通流量很小,因此可以延长绿灯时间,令ΔG为PB。模糊规则形式为IF (RLisVL) AND (UOisVS) THEN (ΔGisPB),其余规则以此类推。
联系实际需求及每条规则的重要程度可赋予每条规则不同的权重,以起到更佳的控制效果。本文不区分规则之间重要性程度,将每条控制规则权重均设置为1。
1.4 输出量去模糊化处理
模糊产生器使用上述规则将UO、RL映射成ΔG的一个模糊集合。通过模糊控制算法计算输出的控制量是一个模糊集,需要将模糊集变成控制量中的精确量,再将精确量转化为所需要的具有物理意义的输出量。常用的去模糊化方法有3种,最大隶属度、中位数判决、加权平均。本文采用加权平均,定义如式(2)。
(2)
式中:ΔG为延长绿灯时间;N为模糊规则数;wi为第i条规则的加权系数;ci为输出模糊集的中心;fi为第i条模糊规则的模糊蕴含。采用加权平均法能够较好地实现去模糊化。
1.5 算法模型求解
使用MATLAB模糊控制工具箱Fuzzy进行控制算法求解。Fuzzy为模糊控制器的设计提供了一种非常便捷的途径,使用它不需要经过人工编程进行复杂的模糊化、模糊推理及反模糊化处理,只需要在控制界面设定相应参数,即可设计出所需要的控制器。
在运行窗口执行Fuzzy命令,在控制界面输入相应的设定参数,可得到控制规则,见图4,绿灯延长时间见表2。得到反映匝道排队长度、上游车辆占有率和绿灯延长时间之间输入与输出的关系曲面图见图5。

图4 控制规则图
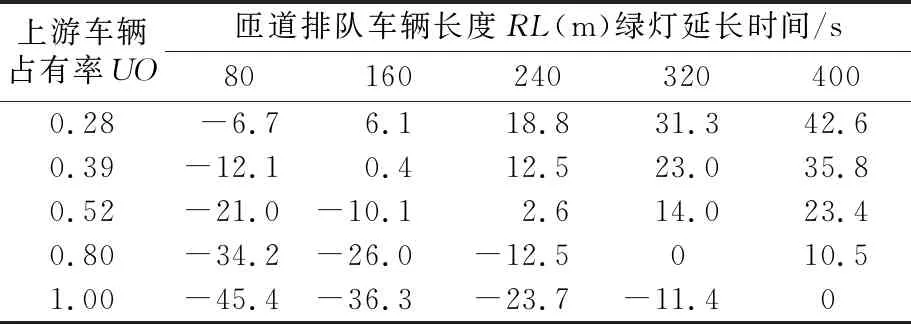
表2 绿灯延长时间表

图5 绿灯延长时间与匝道排队长度、上游车辆占有率的关系图
2 信号灯配时设计及仿真实验
以城市快速路道路检测器数据为研究基础,使用2017年5月26日杭州上塘高架大关匝道下午时段数据进行研究。将数据处理为单位、量级一致,并进行相应的统计整合,得到主路流量数据见图6。

图6 2017-05-26上塘高架大关段主路流量数据
2.1 信号灯配时设计及控制方案
本文信号灯具体设置位置见图7。

图7 信号灯设置位置
本信号控制仅放置在匝道上,不控制主路车流,因此为单相位信号灯。 预设信号灯周期为120 s,令信号灯周期C=120 s,黄灯时间取TY=2 s,初始绿灯时间与红灯时间TG0=TR0=59 s。信号灯周期见图8。约束条件为0≤TG≤C,当TG=0代表该周期信号灯全红,TG=C表示该周期信号灯全绿。
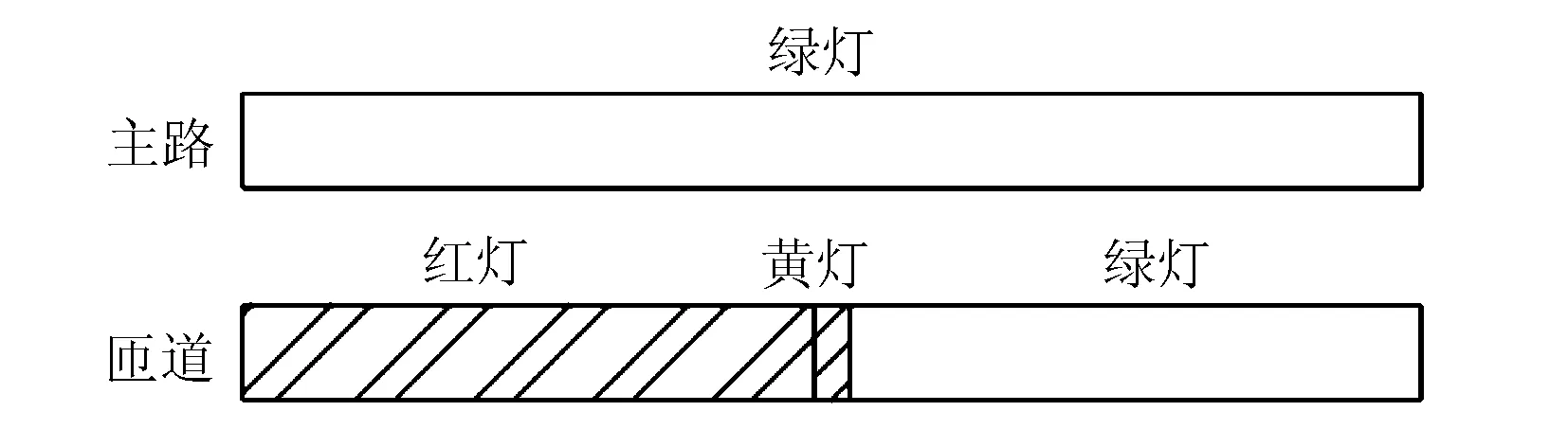
图8 信号灯周期示意图
2.2 绿灯延长控制方法
检测器测得的交通流数据为实时值,因此可根据测得的交通状况决策本周期的匝道信号灯控制方案,流程图见图9。

图9 绿灯延长方法流程图
本周期绿灯延长时间通过模糊控制算法算出,绿灯时间TG=TG0+ΔG,红灯时间TR=C-TG-TY。经过计算,不同情况下匝道绿灯时长表见表3。

表3 绿灯时长表
3 MATLAB联合VISSIM协同仿真
利用VISSIM交通仿真软件提供的排队长度、车速信息等交通参数,进行数学运算转换参数输入,在MATLAB编写的模糊控制器得到新的信号配时方案提供给VISSIM。VISSIM在本周期内根据MATLAB提供的信号灯组合方案重新进行交通控制,并将交通评估量如平均延误时间、平均停车次数、行程时间等参数输出。
3.1 路口模型绘制
跟据实际道路情况确定主路与入口匝道位置关系,还原真实道路场景见图10。

图10 VISSIM环境下路口图
设置主路类型为高速路(允许自由换道),期望车速为60 km/h,匝道类型为城市道路(机动车型),期望车速为30 km/h。在匝道设置信号灯头与排队计数器,在主路上下游每个车道分别设置数据采集点。
3.2 仿真实验设计
1) 设定信号灯初始值、输入流量数据,并用VISSIM进行仿真。
2) 采集仿真指标:主路占有率、匝道排队长度、交通流量、速度。
3) 根据主路占有率、匝道排队长度,利用MATLAB模糊控制计算绿灯延长时间。再根据信号灯配时设计方案计算新的配时。
4) 在新的配时方案下,重新运用VISSIM仿真,采集仿真指标。比较前后仿真结果。
3.3 仿真结果评价分析
根据统计结果,本路段下午时段车流量在2 000~3 800 veh/h之间,因此选取2组极值进行仿真实验。
3.3.1小流量仿真
输入主路车流量2 000 veh/h,匝道车流量500 veh/h,通过检测器经计算得到上游占有率平均值为16.1%,匝道排队长度平均值为134 m,输入模糊控制器,输出绿灯延长时间为12.1 s,即本周期绿灯时间为71.1 s,仿真结果见表4、表5。

表4 匝道控制性能对比表

表5 主路控制性能对比表
在小流量情况下,通过模糊控制延长绿灯时间使得匝道排队长度下降48.7%,停车次数下降37.3%;并且主路各项指标变化不大,仅速度下降3.8%。说明在小流量情况下,模糊控制能够起到兼顾主辅路通行效率的效果。小流量仿真下,定时控制和模糊控制对比见图11、图12。

图11 匝道对比结果图
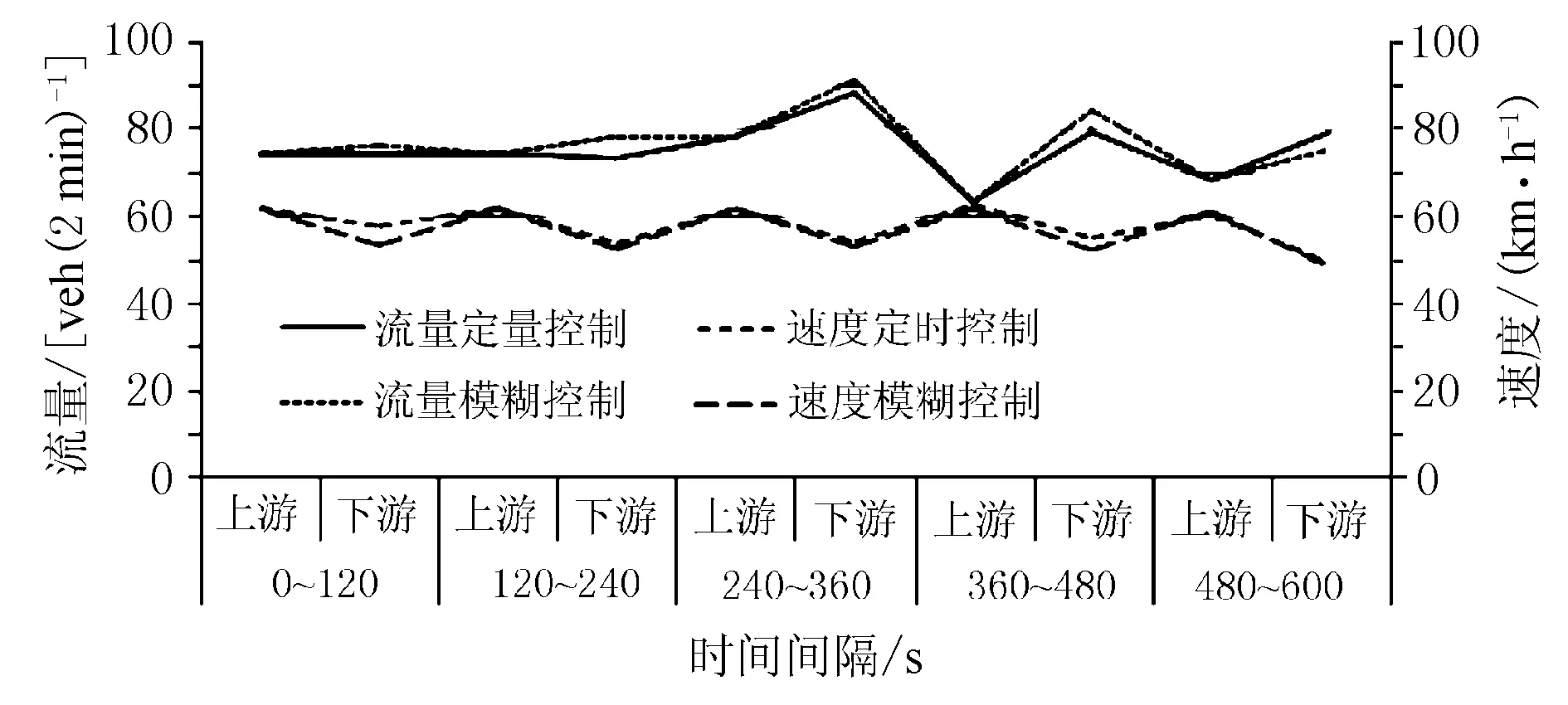
图12 主路对比结果图
3.3.2大流量仿真
输入主路车流量3 800 veh/h,匝道车流量800 veh/h,通过检测器经过计算得到上游占有率平均值为44.8%,匝道排队长度平均值为183 m,输入模糊控制器,输出绿灯延长时间为-11.3 s,即本周期绿灯时间为47.7 s,仿真结果见表6、表7。

表6 匝道控制性能对比表

表7 主路控制性能对比
大流量仿真下,定时控制和模糊控制对比见图13和图14。

图13 匝道对比结果图

图14 主路对比结果图
由图13、图14可见,在大流量情况下,与定时控制相比模糊控制使主路上游排队长度下降78.2%,行驶速度提高11.7%。同时对于匝道的影响较小,排队长度仅增加4.6%,停车次数增加2.4%。充分体现大流量时主要保障主路通行需求的特点。
4 结语
模糊控制是一种非线性控制系统方法,在城市快速路主路和入口匝道上安装多个传感器,根据传感器测得的交通流信息,获取模糊控制的相应输入变量。
本文以杭州上塘高架大关路段入口匝道数据为例,利用模糊控制方法定义合适的规则库、划定相应隶属函数、修改推理过程,构建了模糊逻辑入口匝道控制器。根据模糊控制器输出的绿灯延长时间,得到能反映主线和匝道交通流变化的自适应信号灯配时方案。利用VISSIM软件进行仿真评估模糊控制的可行性,仿真结果显示通过模糊控制能够较好地提高主路运行效率,并且兼顾匝道车流,证明了该方法的实用性和有效性。
猜你喜欢
实用临床护理学杂志(电子版)(2020年28期)2020-07-14
现代家电(2019年21期)2019-12-28
电子技术与软件工程(2017年4期)2017-03-27
家庭用药(2017年2期)2017-03-14
少年体育训练(2015年7期)2015-12-05
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
中国服饰(2014年11期)2015-04-17
城市道桥与防洪(2014年2期)2014-02-27
城市道桥与防洪(2013年8期)2013-03-11
城市道桥与防洪(2013年8期)2013-03-11
