
下肢外骨骼康复机器人人因工程研究进展
2021-11-09 06:03王秋惠姚景一
图学学报 2021年5期
王秋惠,姚景一
下肢外骨骼康复机器人人因工程研究进展
王秋惠,姚景一
(天津工业大学机械工程学院,天津 300387)
下肢外骨骼康复机器人是专门针对下肢运动障碍及行动不便者,提供康复锻炼的智能化装备,其发展对于中国康复事业具有重大的理论意义与实际应用价值。人因工程研究可有效提高下肢康复机器人HRI人机交互安全性与交互效率。因此,深入探讨国内外下肢外骨骼康复机器人人因工程研究进展,对其研究现状、发展趋势进行总结归纳。通过文献检索方法对相关文献进行分析,发现人机交互、步态行为、结构设计、安全问题等是下肢外骨骼康复机器人人因工程领域的研究热点,并从人因出发,系统梳理国内外下肢外骨骼康复机器人人因工程研究进展和发展动态,提出我国在下肢外骨骼康复机器人人因工程领域所面临的挑战,研究重点和未来发展趋势。
下肢外骨骼机器人;康复机器人;人因工程;人机关系;研究与应用进展
中国人均寿命普遍延长,老龄化群体逐渐扩大,截止2019年数据显示,中国60周岁及以上的老年人占总人数的18.1%,65周岁及以上的老年人占总人数的12.6%[1],而且这个比重还在逐年增长。快速老龄化及高龄化趋势导致下肢康复服务的需求不断加大,使得各国加强了对医疗康复机器人相关技术的研究。通过康复师利用专业知识帮助患者恢复下肢运动功能是各国的传统方式,由于康复师人数有限,康复治疗时间和地点有限,总是满足不了需求。为此,医疗机器人经常因成本低、治疗效果好、安全可靠等优势被各国医疗机构用于患者康复训练[2]。
而随着社会老龄化进程不断加深,康复机器人的社会需求得到广泛关注。高校、企业和科研机构开始研究下肢外骨骼康复机器人,并希望能够造福人类。
国防军工最初使用下肢外骨骼机器人作为单兵作战武器,旨在提高士兵作战能力与后勤保障能力,而后在医疗康复领域得到迅速发展。目前,该技术在国外已经步入全面发展时期,而国内研究时间较短,在研究成果和经验方面相对不足。随着科学技术的更新和国内需求的增加,国内部分高校和科研机构如上海交通大学、电子科技大学以及中科院合肥研究所等,正在加大对其研究,且取得一系列研究成果[3]。
在研究下肢外骨骼康复机器人如何辅助下肢运动障碍患者行走过程中,人因工程是十分重要的环节,良好的人因工程设计可以提升产品的工作效率,提升患者的舒适度和心理接受能力。本文从文献综述的角度对国内外下肢外骨骼康复机器人的发展现状、人因工程研究进展、人机协作安全问题等进行梳理,并阐述其目前面临的挑战及未来的发展趋势。
1 国内外研究与应用现状
1.1 国外研究与应用现状
全球第一个下肢外骨骼机器人是由俄罗斯YAGNN[4]于1890年研制的,该机器人可有效提高使用者的下肢运动能力[5],从而带动各国对其研究的热潮,并积极地推动了下肢外骨骼康复机器人后续的发展,此后越来越多的国家和科学家投入到康复医疗机器人的研究中。
1935年,美国研发出Wind-up机器人应用于协助下肢运动障碍患者行走[6]。1970年初,南斯拉夫研制出下肢外骨骼机器人,该装置采用气动作为动力源,对此后的下肢外骨骼康复机器人发展产生深远的影响[7]。
2001年,美国国防高级研究计划局启动了“Exo-skeletons for Human Performance Augmentation”(增强人体机能外骨骼)项目[8],极大地推动了外骨骼机器人在医疗康复方面的发展。
Lokomat康复机器人是第一台悬挂式下肢外骨骼康复机器人并搭载全自动步态评估训练系统(图1(a)),其特点是适用年龄广、适用人群多[9]。该康复机器人的驱动设计主要作用于下肢的髋关节和膝关节,结构主要是滚珠丝杠,单腿自由度个数为2个,电机驱动力主要靠其传递,进而完成髋关节和膝关节在矢状面上的运动[10]。荷兰研发的Lopes康复机器人所使用的控制器为阻抗控制器,可控制外骨骼穿戴设备与下肢同步运动,驱动装置的反向驱动通过串联弹性致动来实现,并可实现步态恢复、运动学功能评估和实时监测康复状态功能[11]。美国研发了ALEXⅠ机器人,其运动信号是借助机械装置中的非线性滤波器传递的,并引导用户按照外骨骼机械装置的预设轨迹进行运动[12]。经过不断改进技术,其视觉反馈优势明显[13]。
HAL外骨骼机器人由日本筑波大学于2001年研制成功,可为佩戴者提供步态训练和下肢质量支持,辅助患者实现行走功能(图1(b))[14]。经过研究人员不断开发新技术[15],配合上肢机械外骨骼的使用,导致其结构更精简、质量更轻便、续航时间更持久[5]。

图1 Lokomat机器人和HAL机器人
((a) Lokomat robot[9]; (b) HAL robot[14])
ReWalk机器人适用人群主要是因脊髓损伤而导致下肢运动机能受损的患者[16],由电池供电,关节传递的运动信号可由倾斜传感器感应并传递,从而辅助患者行走[17]。
WalkTrainer机器人是由法国洛桑联邦理工大学设计的,驱动下肢运动的力可以借助该装置采集到的肌电信号计算。腿部相应肌肉可由电极刺激传递相关信号,动力来自机器人的线性制动器,并可由曲柄机构传递动力,辅助下肢运动障碍患者实现运动功能[18]。
MOLTENI等[19]认为,康复机器人可以对患者产生复杂可控的多感觉刺激,应该从机器人的运动强度、复杂性和特异性来判断机器人治疗的功效和效率。HAMZA等[20]提出动静平衡、防止跌落、确保控制器的稳定性等对用户安全至关重要,并通过相关研究验证。
1.2 国内研究与应用现状
中国与发达国家相比在该方面研究起步时间较晚。
2014年,上海交通大学研制出一款下肢外骨骼康复机器人,很好地融合了表面肌电信号与交互力,功能更完善,性能也得到更大提高[21]。2016年,哈尔滨工业大学研发了HIT-LEX机器人[22]。
2018年,北京大艾机器人科技有限公司研制出了Ailegs机器人。该装置的动力来源为电动机,髋、膝关节的动力也来自于电动机,可与拐杖配合使用,保证使用者的安全,提高产品的安全系数,并尽量不改变使用者的步行习惯,提高产品的适用性,并配合患者康复(图2(a))[23]。该机器人各部位可根据使用者自身情况自由调节,并辅助适应因各种问题产生的下肢障碍,满足使用者各自目的[5]。
2017年,上海傅利叶智能科技有限公司研制出FourierX1机器人,可以提高用户使用时的安全性,感知周围环境。2019年,该企业研制出第二代康复机器人产品FourierX2,该装置在第一代的基础上又增加了许多功能,提高产品的适用性(图2(b))[24]。

图2 Ailegs机器人和FourierX2机器人
((a) Ailegs robot[23]; (b) FourierX2 robot[24])
2019年,中国科学院深圳先进技术研究所研发出Auto-LEE,该装置自由度个数为10,各个部位可独自运动,共同辅助人体行走,保证安全,不需借助其他装置协助,这与传统外骨骼大不相同[25]。
由人口老龄化导致的下肢病患问题是各国共同面对的问题,为了更好地提升老年人下肢康复效果、康复效率和舒适度,国外一直在下肢外骨骼康复机器人领域开展探索性研究,取得一定成果,并不断投入医疗市场。中国虽然步入该领域时间不长,但是高校、企业和科研院所等都在积极开展基础与应用研究,力图打造舒适度高、人机协作安全程度高、续航时间久、质量轻,适合中国老年群体的下肢外骨骼康复机器人。
2 下肢康复机器人分类
人体的运动是依靠关节转动来实现的,髋关节、膝关节、踝关节均影响着人体的下肢运动[10],关节运动范围见表1。
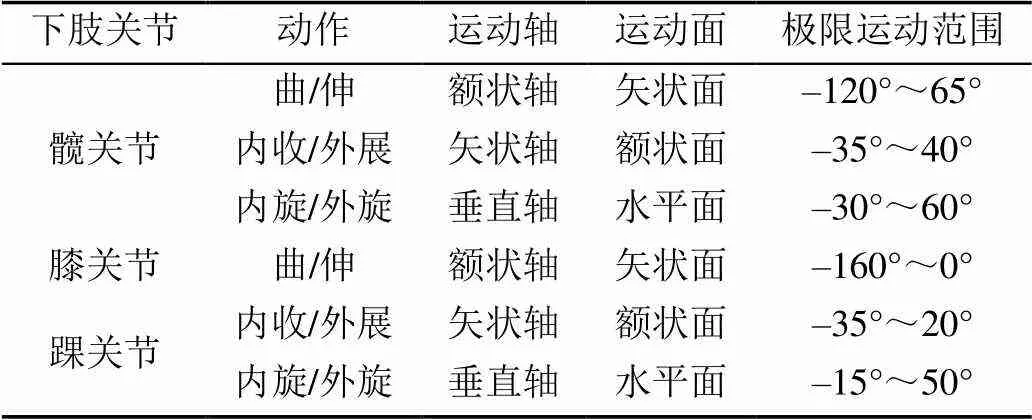
表1 人体下肢关节运动范围[26]
按照关节作用部位、力传动方式和自由度的不同,下肢康复机器人可分类如下:按照关节作用部位的不同,可分为髋关节、膝关节和踝关节下肢康复机器人以及多关节结合下肢康复机器人;按照力传动方式的不同,可分为齿轮传动、鲍登线传动和丝杠螺母下肢康复机器人以及多种传动方式组合的下肢康复机器人;按照自由度的不同,下肢外骨骼康复机器人可分为单侧自由度为1~7的机器人。驱动方式的改进有助于改善患者的康复效果,并且影响整个装置的结构设计、控制策略和功能等[10]。
3 人因工程设计研究
3.1 人因工程学内涵
人因工程的研究重点是提高使用者在使用产品时的舒适性和满意度,让使用者在使用产品时能够得心应手,提高使用效率[27]。人因工程学在二战中迅速发展,人因工程学在仪表盘等的应用,在很大程度上减少了驾驶员的伤亡。安全有效的人因系统架构是提升使用效率、使用安全以及设计体验的重要保证。
用户在使用下肢外骨骼康复机器人的过程中,与周围环境共同构成了完整的“人-机器人-环境”复杂人因系统。在其设计过程中,人机交互关系显得尤为重要,从“人”方面需要充分考虑到人体的基本素质、心理生理特点;从“机器人”方面需要充分考虑到性能、相关参数等;在“环境”方面需要充分考虑到环境的作业特征。充分考虑到人与机器人的动作分析、稳定性、适应性和运动轨迹,并结合周围环境进行综合分析[28]。因此,人因工程研究对下肢康复机器人人因系统至关重要,且对其整个结构设计等有较大影响。目前,各国都非常注重人因工程在下肢外骨骼康复机器人的应用,在设计中考虑到用户人体的尺寸、生理和心理特性,以人为中心,提高产品的舒适度和人机协作关系。
3.2 下肢康复机器人人因工程研究内容
面向下肢外骨骼康复机器人的人因工程,从人的需求出发,系统梳理该装置中人因工程的研究内容,论述国内外在其领域的研究重点和不足之处。以下肢外骨骼机器人、康复机器人、人因工程等为关键词搜索到二百余篇来自国内外期刊的文献,并通过SATI软件进行分析,发现步态规划、结构设计是研究热点,如图3所示。

图3 分析研究热点
3.2.1 步态分析
人类的行走是周期性过程,配合双腿交叉摇摆前进,其是通过肢体协调配合运动并前进,步行、跑步等均属于步态。全球的下肢外骨骼康复机器人的运动方式主要为2种,①用户提前设定装置的运动轨迹;②机器人通过实时提取分析用户的需求,配合人行走[29]。只有深入分析步态行为,才能设计出符合人机工程学的下肢外骨骼康复机器人。步态分析在人机工程学的研究中占据重要地位,通过对人的步态行为分析,人的尺寸分析,可以设计出产品的合适尺寸和角度。
2015年,香港中文大学研制出机器人CUHK-EXO,该装置的驱动来源为电动机,髋、膝关节的动力也来自于电动机,并可与外部装置如拐杖配合使用,帮助使用者实现行走等功能。该装置可对使用者的行走数据进行分析,从而更好地提高人机协作能力[30]。该款机器人有良好的人机协作能力,可以辅助使用者进行稳步行走,减少运动过程中的障碍,人机工程学在其中得到很好的应用。由荷兰的特温特大学研制出的MindWalker机器人,可帮助使用者以0.8 m/s实现行走等功能[31]。该装置可实时监控人体行走状态,及时调整机器人作业姿势,并配合相关检测及时修正[5]。通过精确的步态分析,能够极大提高产品的舒适性和工作效率,保证人机关系的协调和安全性,步态分析是人机工程研究领域不可缺少的组成部分。
3.2.2 结构设计
良好的结构设计必须要考虑人因工程学。传统的人因工程学涵盖人体解剖学、测量学、生理学和生物力学等[32]。在下肢外骨骼康复机器人结构设计中,人因工程学主要包括各关节自由度分析,人使用时的安全及心理生理反应,有良好人机关系的结构设计,实时健康检测等。
为了提高使用者舒适性和人机协作关系,机器人应该充分考虑到人体关节的特征。通过对人体进行步态分析,得到下肢运动时的关键部位是髋关节、膝关节、踝关节,并将1~2个自由度分给髋关节,仅将1个自由度分给膝关节,踝关节结构使用球铰结构,有3个自由度[33]。
文献[33]采用曲柄滑块机构设计髋关节,能够辅助用户完成行走等功能。文献[34]设计的机器人髋关节自由度个数为2,膝关节自由度个数为1,踝关节自由度个数为3。该款机器人可以通过调节螺栓的松紧来调节适合使用者的宽度和长度,实现无极调节。
3.2.3 人机关系
在研究下肢外骨骼康复机器人人因工程过程中,人机关系是必须要考虑的内容,良好的人机关系是该机器人成功的关键。在各国的研究中,如何处理人机关系,提高用户安全性和使用效率一直是研究重点。
人机关系中最基本的关系就是共存关系[35],即人与机器人之间互相依存、单独存在,可共同执行相同的任务,彼此之间互相协作。在此基础上产生了另外一种关系——交互关系。交互关系也是人机关系中重要的组成部分,交互关系与共存关系最根本的区别在于具有交互关系的人和机器之间可以互相“理解”彼此意图,有交流沟通的环节,不再是单独执行任务。人机关系中还有合作关系,即人与机器为了完成同一目标,互相帮助,也有沟通的环节[32]。
在这里,装置与人之间是直接物理接触,并执行行走这一相同的任务。人和下肢外骨骼康复机器人既是交互关系也是协作关系。通过对人的步态行为分析,机器可以顺利地辅助使用者实现行走的功能,和谐共生是人机关系的发展方向。
3.2.4 人机交互安全性问题
人机交互的安全性问题是人因工程要解决的关键问题。最好的人机关系不是靠外部装置或外力来保证使用者的安全,而是在人与机器人共同工作的过程中,机器人产生的一种本能的反应,能够提前预判或及时发现存在的安全隐患,及时发出警告或立即采取保护措施[36]。在评估人机交互安全性的问题上,HORVÁTH和ERDŐS[37]建议使用仿真手段。人机交互安全性问题是急需解决的难题。例如一些下肢外骨骼康复机器人,还需要借助拐杖等外部装置维持用户行走时身体的平衡,可能会在用户进行上肢操作时,产生安全问题[32]。
有些机器人还可以配合轮椅使用,安全性得到很大程度上的提高。某些装置还可以及时上传并分析使用者的生理、心理等数据[38]。信息的迅速准确传递还可以及时预防或发现问题。如,当机器人感受到使用者有摔倒趋势或步态角度异常,会及时报警并保护使用者。
从以上对人机关系的分析可以看出,下肢外骨骼康复机器人人机一体化趋势明显,其首要任务仍然是保障人的安全,提升人机交互的安全性[36]。由于该机器人面临的人群主要是下肢运动障碍的老龄群体,所以在其设计过程中要预防产品出错,给使用者带来二次创伤。这就要求在设计过程中,充分考虑到人体各部位尺寸,神经敏感度以及机器如何在出现危险和故障时能首先保证使用者的安全。考虑到老年人面临的生理变化,如感知能力下降、神经功能衰退、认知能力退化等,以及心理上的变化如安全感降低、孤独感增强、适应性变差等,从色彩上的选择到机构的建立都要慎重选择,考虑到老年人的审美和实际需求,尽量减少操作步骤,延长机器人的使用寿命。在满足使用功能的前提下如何提高产品舒适度,提高工作效率,完善良好的人机关系,简化操作方式,是一直要面对和突破的问题。机器人的步态分析、整体结构设计、人机关系分析等是该装置的研究重点和突破点,各国在人因工程方面都投入了很大的人力和财力,都在积极利用人因工程学技术提高下肢外骨骼康复机器人使用效率和交互安全性,改善人机关系,逐渐由“以技术为中心”转变成“以人为中心”。
4 挑战与展望
国内外在下肢外骨骼康复机器人研究方面都还存在着一些问题,尤其中国在下肢外骨骼康复机器人研究时间相对国外晚,人因工程学在国内发展也不够成熟,因此,有必要分析下肢外骨骼康复机器人人因工程方面的不足和挑战,并据此提出一些发展建议。
4.1 挑 战
国外在下肢外骨骼康复机器人人因工程方面所面临的挑战主要是能否增强人与下肢机器人的人机协作能力及使用者的心理适应能力。
国内在下肢外骨骼康复机器人人因工程方面所面临的挑战主要是学科建设、科学研究和社会接受度等方面。
人因工程学引入国内时间不长,在知识储备和影响力方面还存在诸多不足。高等工程教育阶段对本学科的基础理论知识的培养重视程度不高,且很多企业在研发过程中,只注重产品的功能性,很少考虑到“人”的因素,导致人机关系协调性差,使用者体验感较差,产品的工作效率也大大折扣。
“人”是下肢外骨骼康复机器人的研究核心,而人本身就是一个复杂的研究对象,在生理、心理等方面存在大量复杂问题和不确定性。尤其是心理方面,人的心理非常复杂,很难通过数学模型或程序分析,这对人因工程也提出了挑战,需要更加细致地进行分析,提高人机协作能力[32]。
该装置能否及时发现危险,保证人的安全,降低使用者的心理负担,顺利完成辅助行走功能,准确充分理解使用者的感受等都是能否被大众所接受的关键。大众对机器人的信赖程度还有待提高,尤其是老龄人群,在思想上能否从传统的人工康复向机器人康复转变,也是一个需要解决的问题。
4.2 展 望
根据上述挑战,综合下肢外骨骼康复机器人在国内外研究及应用发展情况,提出如下建议。
(1) 加强对人因工程学方面的研究与普及。国家要将人因工程学列为重点发展的学科内容,凸显人因工程学在相应课程体系的重要性。同时,鼓励高校和科研部门,加强对人因工程学方面的研究,让人因工程学的理念应用到机器人等的智能装备设计与制造中去,推动人因工程学在机器人等领域的发展与延伸。
(2) 构建下肢外骨骼康复机器人设计中的信息反馈环节,建立人体信息分析数据库,及时分析使用者生理和心理数据,包括感知能力,认知能力,运动机能衰退,心理适应性变差等,及时调整机器人的下一步操作,预防和发现危险,保证使用者的安全。
(3) 加强在社会中宣传康复机器人较传统康复手段的优点,解答大众对康复机器人的疑问与忧虑,从心理上减轻使用者负担。同时,各国要加强合作,充分利用现有技术,改善人机关系,优化结构设计,提高产品舒适度,增强产品耐久性,轻便性。加强该装置的模块化设计,实现个性化的康复功能,可分析不同患者的需求采用不同康复方法的针对性训练。
5 结 论
通过以上的研究与分析,更加明确人因工程在其研究与应用中的重要性。未来的下肢康复机器人会向着智能化、人性化方向发展,舒适度、安全性、满意度等会得到提高,用户也会更加愿意借助该设备辅助行走,可以很大程度上提高老龄群体的康复效果。
[1] 国家统计局. 中国老年人口达到2.54亿人[EB/OL]. [2020-01-21]. http://feng.ifeng.com/c/7tJA9u9P5jt.
National Bureau of Statistics. China’s elderly population has reached 254 million[EB/OL]. [2020-01-21]. http://feng.ifeng.com/c/7tJA9u9P5jt(in Chinese).
[2] MENG W, LIU Q, DE ZHOU Z, et al. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation[J]. Mechatronics, 2015, 31: 132-145.
[3] 蔡玉强, 曾健. 下肢外骨骼康复机器人的设计及仿真分析[J]. 华北理工大学学报: 自然科学版, 2019, 41(4): 82-88, 94.
CAI Y Q, ZENG J. Design and simulation analysis of lower limb exoskeleton rehabilitation robot[J]. Journal of North China University of Science and Technology: Natural Science Edition, 2019, 41(4): 82-88, 94 (in Chinese).
[4] YAGNN. Apparatus to facilitate walking and running[EB/OL]. (1890-01-28)[2019-07-21].https://www.mendeley.com/research-papers/apparatus-facilitate-walking-running.
[5] 李龙飞, 朱凌云, 苟向锋. 可穿戴下肢外骨骼康复机器人研究现状与发展趋势[J]. 医疗卫生装备, 2019, 40(12): 89-97.
LI L F, ZHU L Y, GOU X F. Current status and development trend of wearable lower-limb exoskeleton rehabilitation robot[J]. Chinese Medical Equipment Journal, 2019, 40(12): 89-97 (in Chinese).
[6] YASUHARA K, ENDO Y. Walking motion assist device: US9610209[P]. 2017-04-04.
[7] VUKOBRATOVICM. Biped locomotion: dynamics, stability, control and application[M]. Berlin: Springer-Verlag, 1990: 36.
[8] GARCIA E, SATER J M, MAIN J. Exoskeletons for human performance augmentation (EHPA): a program summary[J]. Journal of the Robotics Society of Japan, 2002, 20(8): 822-826.
[9] HIDLER J, WISMAN W, NECKEL N. Kinematic trajectories while walking within the Lokomat robotic gait-orthosis[J]. Clinical Biomechanics, 2008, 23(10): 1251-1259.
[10] 徐飞, 佀国宁, 程云章, 等. 下肢康复机器人结构设计的研究进展[J]. 北京生物医学工程, 2018, 37(1): 96-102.
XU F, SI G N, CHENG Y Z, et al. Research advances in structural design of lower limb rehabilitation robot[J]. Beijing Biomedical Engineering, 2018, 37(1): 96-102 (in Chinese).
[11] VENEMAN J F, KRUIDHOF R, HEKMAN E E G, et al. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(3): 379-386.
[12] BANALA S K, KIM S H, AGRAWAL S K, et al. Robot assisted gait training with active leg exoskeleton (ALEX)[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2009, 17(1): 2-8.
[13] ZANOTTO D, STEGALL P, AGRAWAL S K. Adaptive assist-as-needed controller to improve gait symmetry in robot-assisted gait training[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE Press, 2014: 724-729.
[14] SANKAI Y. Leading edge of cybernics: robot suit HAL[C]//2006 SICE-ICASE International Joint Conference. New York: IEEE Press, 2006: 1-2.
[15] KAWAMOTO H, LEE S, KANBE S, et al. Power assist method for HAL-3 using EMG-based feedback controller[C]//2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme - System Security and Assurance. New York: IEEE Press, 2003: 1648-1653.
[16] ESQUENAZI A, TALATY M, PACKEL A, et al. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury[J]. American Journal of Physical Medicine & Rehabilitation, 2012, 91(11): 911-921.
[17] TALATY M, ESQUENAZI A, BRICEÑO J E. Differentiating ability in users of the ReWalkTM powered exoskeleton: an analysis of walking kinematics[C]//2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR).New York: IEEE Press, 2013: 1-5.
[18] STAUFFER Y, ALLEMAND Y, BOURI M, et al. The WalkTrainer—a new generation of walking reeducation device combining orthoses and muscle stimulation[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2009, 17(1): 38-45.
[19] MOLTENI F, GASPERINI G, CANNAVIELLO G, et al. Exoskeleton and end-effector robots for upper and lower limbs rehabilitation: narrative review[J]. PM&R, 2018, 10(9): S174-S188.
[20] HAMZA M F, GHAZILLA R A R, MUHAMMAD B B, et al. Balance and stability issues in lower extremity exoskeletons: a systematic review[J]. Biocybernetics and Biomedical Engineering, 2020, 40(4): 1666-1679.
[21] 范渊杰. 基于sEMG与交互力等多源信号融合的下肢外骨骼康复机器人及其临床实验研究[D]. 上海: 上海交通大学, 2014.
FAN Y J. Study on lower limb exoskeleton for rehabilitation based on multi-source information fusion including sEMG&interactive force and its clinical trail[D]. Shanghai: Shanghai Jiaotong University, 2014 (in Chinese).
[22] 张超. 下肢助力外骨骼机器人研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
ZHANG C. Research on lower limbs powered exoskeleton robot[D]. Harbin: Harbin Institute of Technology, 2016 (in Chinese).
[23] 帅梅. 双足型下肢外骨骼康复训练机器人: CN304822498S[P]. 2018-09-18.
SHUAI M. Biped lower extremity exoskeleton rehabilitation training robot: CN304822498S[P]. 2018-09-18 (in Chinese).
[24] 上海傅利叶智能科技有限公司. FourierX2产品介绍[EB/OL]. [2019-07-21]. http://www.fftai.com/product/X2.php.
Fu Li intelligent technology co., LTD. Shanghai FourierX2 product introduction [EB/OL]. [2019-07-21]. http://www.fftai. com/product/X2.php (in Chinese).
[25] HE Y, LI N, WANG C, et al. Development of a novel autonomous lower extremity exoskeleton robot for walking assistance[J]. Frontiers of Information Technology & Electronic Engineering, 2019, 20(3): 318-329.
[26] PonsJL. Wearable robots: biomechatronic exoskeletons[M]. Souther Gate, Chichester: John Wiley&Sons Ltd, 2008.
[27] 孙林岩. 人因工程[M]. 北京: 中国科技出版社, 2005.
SUN Y L. Human factors engineering[M]. 2nd ed. Beijing: China Science and Technology Press, 2005 (in Chinese).
[28] 王年文, 朱亦吴, 姜文博等. 下肢外骨骼康复机器人人机交互系统分析[J]. 现代商贸工业, 2018, 1: 181-183.
WANG N W, ZHU Y W, JIANG W B, et al. Human-computer interaction system analysis of lower extremity exoskeleton rehabilitation robot[J]. Modern Business Trade Industry, 2018, 39(1): 181-183 (in Chinese).
[29] 林焰, 衣正尧, 李玉平, 等. 一种坞内船体外板喷涂新方法研究[J]. 大连理工大学学报, 2018, 58(1): 43-49.
LIN Y, YI Z Y, LI Y P, et al. Research on new method for ship shell plate spraying in dock[J]. Journal of Dalian University of Technology, 2018, 58(1): 43-49 (in Chinese).
[30] CHEN B, ZHONG C H, ZHAO X, et al. Reference joint trajectories generation of CUHK-EXO exoskeleton for system balance in walking assistance[J]. IEEE Access, 2019, 7: 33809-33821.
[31] WANG S Q, VAN DIJK W, VAN DER KOOIJ H. Spring uses in exoskeleton actuation design[C]//2011 IEEE International Conference on Rehabilitation Robotics. New York: IEEE Press, 2011: 1-6.
[32] 王柏村, 黄思翰, 易兵, 等. 面向智能制造的人因工程研究与发展[J]. 机械工程学报, 2020, 56(16): 240-253.
WANG B C, HUANG S H, YI B, et al. State-of-art of human factors/ergonomics in intelligent manufacturing[J]. Journal of Mechanical Engineering, 2020, 56(16): 240-253 (in Chinese).
[33] 汪步云, 王月朋, 梁艺, 等. 下肢外骨骼助力机器人关节驱动设计及试验分析[J]. 机械工程学报, 2019, 55(23): 55-66.
WANG B Y, WANG Y P, LIANG Y, et al. Design on articular motion & servo driving with experimental analysis for lower limb exoskeleton robot[J]. Journal of Mechanical Engineering, 2019, 55(23): 55-66 (in Chinese).
[34] 周伟杰, 韩亚丽, 朱松青等. 下肢外骨骼助力机器人关节驱动设计及试验分析[J]. 现代制造工程, 2020, 3: 48.
ZHOU W J, HAN W L, ZHU S Q, etal. Design and experimental analysis of joint drive for lower limb exoskeleton assist robot[J]. Modern Manufacturing Engineering, 2020, 3:48(in Chinese).
[35] WANG L, GAO R, VÁNCZA J, et al. Symbiotic human-robot collaborative assembly[J]. CIRP Annals, 2019, 68(2): 701-726.
[36] 王秋惠, 张一凡, 刘力蒙. 老龄服务机器人人机界面设计研究进展[J].机械设计, 2018, 35(9): 105-113.
WANG Q H, ZHANG Y F, LIU L M. Advance in Human-Robot interface design of service robot for the elderly[J]. Journal of Machine Design, 2018, 35(9): 105-113 (in Chinese).
[37] HORVÁTH G, ERDŐS F G. Gesture control of cyber physical systems[J]. Procedia CIRP, 2017, 63: 184-188.
[38] ROMERO D, STAHRE J, WUEST, et al. Towards an operator 4.0 typology: a human-centric perspective on the fourth industrial revolution technologies[C]//The International Conference on Computers and Industrial Engineering (CIE46).New York: IEEE Press, 2016: 29-31.
Progress in the research of exogenic lower limb rehabilitation robot
WANG Qiu-hui, YAO Jing-yi
(School of Mechanical Engineering, Tiangong University, Tianjin 300387, China)
Lower limb exoskeleton rehabilitation robot is a kind of intelligent equipment providings rehabilitation exercise for the patients with lower limb dyskinesia or impaired mobility. Its development is of great theoretical significance and practical application value for the rehabilitation in China. Human factors engineering research can effectively improve the safety and efficiency of human-computer interaction of lower limb rehabilitation robot HRI. The research progress of human factors engineering of lower limb exoskeleton rehabilitation robot at home and abroad was deeply explored, and its research status and development trend were summarized. The related literatures was analyzed by literature retrieval method. It was found that HRI, gait behavior, structure design and safety issues are the research hotspots in the field of human factors engineering. Starting from human factors, this paper systematically reviewed the research progress and development trend of human factors engineering of lower limb exoskeleton rehabilitation robot at home and abroad, and presented the challenges, research focus and future development trend in the field of human factors engineering of lower limb exoskeleton rehabilitation robot in China.
lower limb exoskeleton robot; rehabilitation robot; human factors engineering; the human-robot interaction; research and application progress
TP 391
10.11996/JG.j.2095-302X.2021050712
A
2095-302X(2021)05-0712-07
2021-01-08;
2021-02-17
8 January,2021;
17 February,2021
王秋惠(1969-),女,山东潍坊人,教授,博士。主要研究方向为智能人因学、设计人因学、机器人HRE人因工程及机器人HRI人机界面设计。E-mail:wangqiuhui@126.com
WANG Qiu-hui (1969-), female, professor, Ph.D. Her main research interests cover smart robot ergonomics, ergonomics in design, robot HRE human factors engineering and robot HRI human-machine interface design, etc. E-mail:wangqiuhui@126.com
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
青少年科技博览(中学版)(2022年6期)2022-08-31
中学生学习报(2022年26期)2022-05-23
南都周刊(2021年3期)2021-04-22
小哥白尼(野生动物)(2021年12期)2021-03-29
领导文萃(2019年18期)2019-09-25
轻兵器(2019年5期)2019-06-21
民用飞机设计与研究(2019年4期)2019-05-21
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
