基于半阵相位和差法的相控阵雷达测角方法研究
2021-11-09 11:50徐磊,张放
舰船电子对抗 2021年5期
徐 磊,张 放
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
目标相对于雷达的角度值是雷达对目标探测的重要参数之一。单脉冲和差测角方法普遍应用于相控阵雷达测角系统中[1],目前和差测角常用的方法有[2-3]:基于对称取反的和差测角方法、基于直接加权法的和差测角方法、基于双指向法的和差测角方法。根据雷达对回波信号提取角信息的方式,和差测角又可分为相位法和差测角和振幅法和差测角。文献[4]~[5]对相位和差单脉冲测角性能进行了分析。本文给出基于半阵相位和差法的相控阵雷达测角方法,利用蒙特卡洛方法并进行多次Matlab仿真,对仿真结果进行分析,同时给出进一步提升测角精度的建议。
1 比相和差波束构成方法
布置在空间的2个天线,相距d(d大于雷达信号的数个波长)。单个天线孔径会形成1个对称于天线轴的波束。在远区,2个天线的方向图几乎完全重叠在一起,如果目标在波束范围内,2个波束接收到信号的振幅近似相等。当目标偏离对称轴时,两天线接收信号由于波程不同会带来相位差,此时相位差为η=2πdsinθ/λ,其中d是天线间距,θ是目标对天线对称轴的偏角。因此天线 1 和天线 2 收到的回波信号相位差是η且幅度相同。矢量示意图如图1所示。半阵法阵列相位和差波束示意图如图2所示。

图1 矢量图示意图

图2 阵列相位和差波束示意图


当雷达目标方向偏向天线1时,E1超前E2;若雷达目标方向偏向天线2时,差信号反相。差信号的幅度大小反映了雷达目标偏离天线轴的角度值大小,相位反映了雷达目标偏离天线轴的方向。
2 一维半阵法相位和差测角
一维阵元均匀排列线阵的阵列信号模型如图3所示,设置阵元数目为2L,信号来波方向为θ,所有阵元均匀布置,其间距为d。

图3 一维阵列信号模型
以线阵的首阵元为起始参考点,目标的导向矢量为:
al(θ)=[1,exp(-j2πdsin(θ)/λ),…,
exp(-j2π(L-1)dsin(θ)/λ)]T
(1)
ar(θ)=al(θ)exp(-j2πLdsin(θ)/λ)
(2)
为使接收的和波束方向指向为θ0,数字波束形成(DBF)加权取值为:
(3)
左半阵接收方向图函数为:
Yl=WlHal(θ)=
(4)
右半阵接收方向图函数为:
Yr=WrHar(θ)=exp(-j2πdL/λ·
(sinθ-sinθ0))Yl
(5)
和波束接收方向图函数为:
(sinθ-sinθ0))
(6)
差波束接收方向图函数为:
(7)
接收差波束与和波束的差和比为:
(8)
令β=sinθ-sinθ0,则:
(9)
在相控阵雷达系统进行和差测角时,目标来波方向θ与接收和波束指向θ0接近,sinθ与sinθ0近似相等,则:
(10)
sinθ在θ0处进行Taylor级数展开并忽略高阶量,则:
sinθ≈sinθ0+cosθ0(θ-θ0)
(11)
将式(11)带入式(10)可得:
(12)
由以上推导可知,一维阵元均匀排列的线阵的接收波束差和比为纯虚数,与线阵的阵元数目、阵元间距、信号波长、接收波束指向和目标方向与接收波束指向的偏角有关,其幅度值正比于目标来波方向与阵列接收波束指向的偏角,目标偏离接收波束指向由差和比的虚部符号所确定,如果符号为负则目标偏向左,如果符号为正则目标偏向右。
在实际工程应用中可以根据实际雷达设备的天线规模及信号波长等信息利用信号源进行近场标定和远场验证,对不同波束指向下不同偏角对应的差和比值的斜率进行修正,进一步提高测角精度。
3 二维半阵法相位和差测角
设二维阵面由2L×2N个阵元单元组成,方位阵元单元数为2L,阵元单元间距dx,俯仰阵元单元数为2N,阵元单元间距dy,来波方向方位和俯仰角度值为(θ,φ),和波束中心指向角度值为(θ0,φ0)。以二维阵面的中心为参考。半阵法和差波束形成示意图如图4所示。
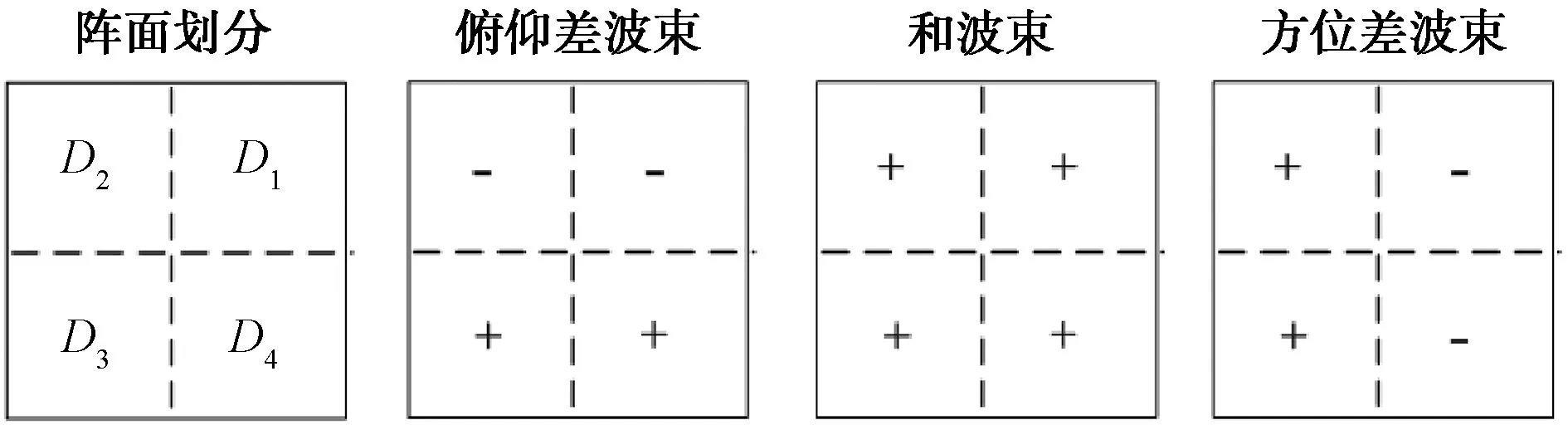
图4 半阵法和差波束形成示意图
令ux=cosφsinθ-cosφ0sinθ0,uy=sinφ-sinφ0,则有:
dy(n-1)uy)/λ)
(13)
D2=exp(-j2πLdxux/λ)D1
(14)
D3=exp(-j2πLdxux/λ)exp(-j2πNdyuy/λ)D1
(15)
D4=exp(-j2πNdyuy/λ)D1
(16)
则和波束的输出为:
DΣ=D1+D2+D3+D4=(1+e-j2πNdyuy/λ)·
(1+e-j2πLdxux/λ)D1
(17)
方位差波束的输出为:
Dad=D2+D3-D1-D4=(1+e-j2πNdyuy/λ)·
(e-j2πLdxux/λ-1)D1
(18)
俯仰差波束的输出为:
Dpd=D3+D4-D1-D2=
(e-j2πNdyuy/λ-1)(e-j2πLdxux/λ+1)D1
(19)
(20)
经泰勒展开,得:
sinφ0sinθ(φ-φ0))/λ)
(21)
同理可得:
(22)
4 计算机仿真分析
4.1 一维阵列
仿真条件:阵元数量40,射频频率10 GHz,阵元间距15 mm,目标数量3,目标1偏离引导角0°,目标2偏离引导角0.2°,目标3偏离引导角1°,蒙特卡洛试验次数100次。下面给出引导角分别为0°、30°时对3个目标进行测角,测角均方差随幅度误差和相位误差变化的仿真。仿真结果如图5~图20所示。
(1) 引导角为0°
引导角为0°,一维线阵波束指向0°时,理想和差方向图如图5所示,鉴角曲线如图6所示。
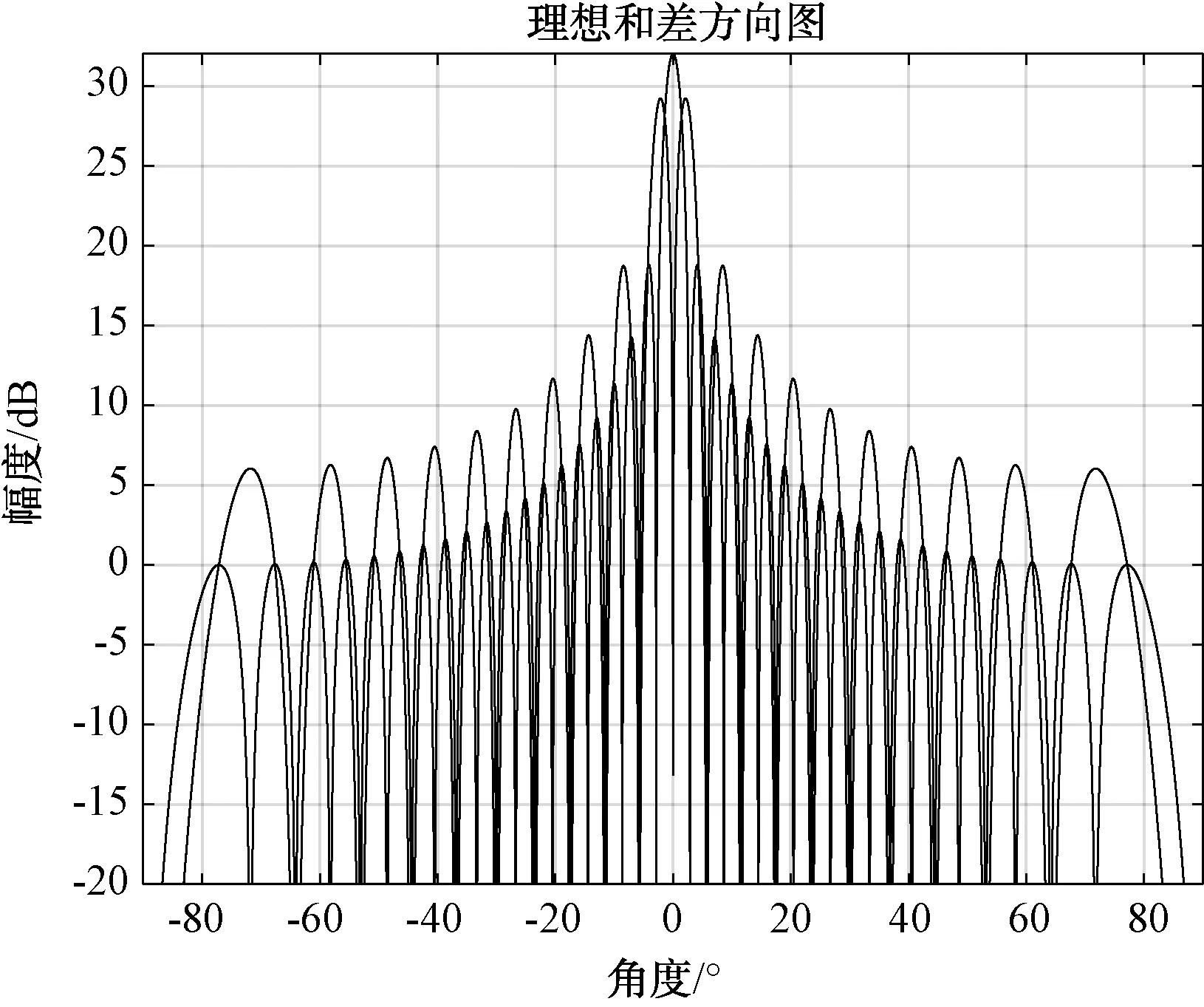
图5 波束指向0°理想和差方向图

图6 波束指向0°鉴角曲线
(a) 以0.2 dB为步进加入6 dB幅度误差,对3个目标进行100次蒙特卡洛仿真,给出3个目标测角均方误差随幅度误差变化曲线,如图7~图9所示。

图7 目标1测角均方误差随幅度误差变化曲线

图8 目标2测角均方误差随幅度误差变化曲线

图9 目标3测角均方误差随幅度误差变化曲线
(b) 以1°为步进加入15°相位误差,对3个目标进行100次蒙特卡洛仿真,给出3个目标测角均方误差随相位误差变化曲线,如图10~图12所示。

图10 目标1测角均方误差随相位误差变化曲线

图11 目标2测角均方误差随相位误差变化曲线

图12 目标3测角均方误差随相位误差变化曲线
(2) 引导角为30°
引导角为30°,一维线阵波束指向30°时,理想和差方向图如图13所示,鉴角曲线如图14所示。

图13 波束指向30°理想和差方向图

图14 波束指向30°鉴角曲线
(a) 以0.2 dB为步进加入6 dB幅度误差,对3个目标进行100次蒙特卡洛仿真,给出3个目标测角均方误差随幅度误差变化曲线,如图15~图17所示。

图15 目标1测角均方误差随幅度误差变化曲线

图16 目标2测角均方误差随幅度误差变化曲线

图17 目标3测角均方误差随幅度误差变化曲线
(b) 以1°为步进加入15°相位误差,对3个目标进行100次蒙特卡洛仿真,给出3个目标测角均方误差随相位误差变化曲线,如图18~图20所示。

图18 目标1测角均方误差随相位误差变化曲线

图19 目标2测角均方误差随相位误差变化曲线

图20 目标3测角均方误差随相位误差变化曲线
4.2 二维阵列
仿真条件:方位阵元数12,俯仰阵元数8,射频频率10 GHz,阵元间距15 mm,波束指向:方位10°、俯仰8°,仿真给出二维阵列和差方向图和鉴角曲线如图21~图24所示。测角误差分析与一维情况相近,不再进行分析。

图21 和波束二维方向图

图22 方位差波束二维方向图

图24 二维阵列方位俯仰鉴角曲线
4.3 仿真结果分析
从仿真结果可知,本方法在阵面法向及偏离法向30°时对偏离引导角不同角度的目标均保持较高的测角精度。测角均方误差随阵列单元中幅度误差的增加而恶化,随相位误差的增加而恶化,仿真结果同时反映本方法对幅相误差容忍度较高。
偏离引导角不同角度的测角均方误差不同,原因为鉴角曲线为类直线,利用斜率进行角度计算时曲率高的区域测角误差稍有恶化。
如需要更高的测角精度可对鉴角曲线采取分段求斜率处理的方法。
5 结束语
本文给出基于半阵相位和差法的相控阵雷达测角方法的数学建模及计算机仿真,在不同的扫描角度对偏离引导角不同角度的目标均保持较高的测角精度。通过仿真分析可见测角精度尽管随幅相误差恶化,但仍保持了较高精度。在测角精度要求更高的雷达中应用时,可对鉴角曲线采取分段求斜率处理的方法,构建频率-扫描角度-鉴角曲线斜率的三维矩阵库。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化·高三版(2021年10期)2021-11-01
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
福建基础教育研究(2019年6期)2019-05-28
移动通信(2019年2期)2019-03-27
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
现代电子技术(2009年8期)2009-06-25