
船用水下机械臂载体结构设计及稳定性分析
2021-11-08 01:59:54韩江桂郭文勇
兵器装备工程学报 2021年10期
胡 淼,韩江桂,郭文勇
(海军工程大学 动力工程学院,武汉 430033)
1 引言
目前,随着我国海军新装备的投入和使用,装备的发展建设重点从解决有无问题转移到提高装备性能方面。舰船水下部分的正常运转是其正常航行的根本保证,舰船在海洋中行驶时,螺旋桨往往由于缠绕渔网而失去动力,严重影响舰船的在航率和执行任务。但由于舰船停留在水面上时其活动空间的特殊性以及用于舰船水下应急维修的保障手段严重不足,目前主要还是依靠潜水员下水解决问题,危险系数大且难度高。
针对目前用于舰船水下应急维修方案的自动化程度低且舰船进坞维修周期长、维修费用高等问题,本文设计了一种可以输送和搭载水下机械臂及其辅助设备进行水下作业的可拆装的固定式载体装置,并对其末端搭载的水下机械臂模拟水下作业时的操控稳定性进行分析和验证[1-2],将水下机械臂实际位置与预期位置进行对比,所求结果可为舰船水下应急维修结构设计以及水下机械臂操控稳定性分析提供参考。
2 水下机械臂载体结构设计
根据某型维修对象船体的吃水深度(不超过5 m),本研究设计了一种以三角形桁架结构形式为主体的固定式水下机械臂载体结构,图1为其搭载机械臂进行水下作业时的示意图。在设计时充分考虑各部分结构的尺寸大小,并采用模块化的结构形式,使其具有较好的通用性和互换性,以便于快速装拆和储存。该结构主要由基座、起吊装置、锁紧装置、吸盘、垂直桁架、水下电机和伸长桁架等部分组成,各个模块之间通过快锁装置进行连接,保证水下应急维修的要求,从而实现舰船停留在水面上时对其水下船体和附体进行观察、检测和维修。

图1 水下机械臂载体结构示意图
该结构采用锁紧式工作平台,平台底部固定在甲板上,并通过增加海水袋来保持整个结构的稳定性;起吊装置采用移动式电动葫芦,电动葫芦配有2个吊钩,在工作过程中可交替使用;桁架结构由标准节组成,标准节采用三角形桁架结构;吸附在船舷外侧的真空吸盘,可以限制桁架结构的一部分自由度,吸盘可以根据船舷外侧的弧度调整角度;转动装置由水下电机、伸长桁架和机械臂等结构组成,可以绕着垂直桁架结构底端转动,增大了机械臂的工作范围。
由于水下机械臂进行水下作业时对作业精度和运动稳定性要求较高,所以水下机械臂载体结构必须具有足够的强度和刚度。本文综合考虑波浪、水流环境荷载和机械臂工作荷载的极限值,来对载体结构的强度和刚度进行校核。其中,波浪、水流荷载的计算参考势流理论和Morison方程,Morison方程的完整表达式为[3-4]:
(1)
通过计算得到最大水平波浪力为1.277 kN、水流流速为3 m/s时的水流力极值为1.486 kN,并考虑水平方向100 N的机械臂作业荷载,将以上极限荷载乘以安全系数1.35之后施加到水下机械臂载体结构模型上。本文在保证计算精度的前提下,对载体结构进行等效处理,在Workbench中建立的载体结构模型如图2所示。
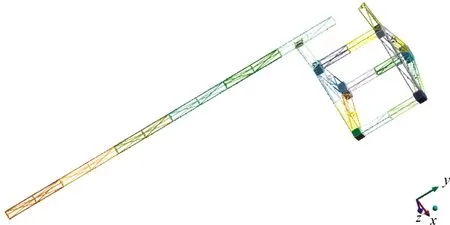
图2 载体结构模型示意图
表1为通过有限元分析得到的载体结构位移极值和等效应力极值的位置和大小。
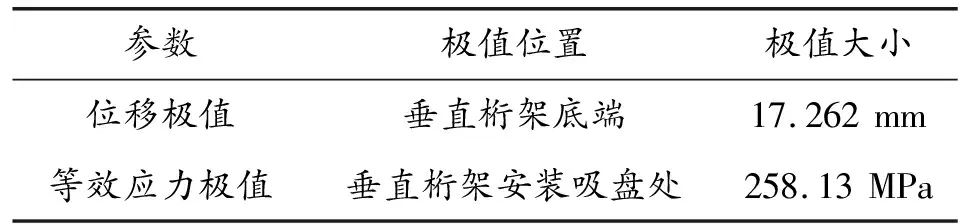
表1 结构位移极值与等效应力极值
由以上结果可知,结构最大水平位移与高度(9 m)比值小于1%,符合结构刚度要求;结构的等效应力极值小于载体结构材料铝合金的屈服强度(310 MPa),整体结构应力过渡均匀,没有出现应力集中,满足强度要求。综上可知,在极限荷载作用下,水下机械臂载体结构的强度和刚度均满足要求,可以输送和搭载水下机械臂进行水下作业。
3 水下机械臂运动学模型的建立
根据实际作业需求在载体结构末端搭载一个六自由度协作型水下机械臂,并依据维修对象船体的尺寸参数,在机械臂底座固接一段伸长桁架结构,通过水下电机与垂直桁架部分进行组装来增加一个旋转关节,从而增大机械臂的作业范围,本文分析对象为协作型机械臂与增加的旋转关节组装而成的新的七自由度水下机械臂。图3为通过Solidworks建立的水下机械臂三维模型。

图3 水下机械臂三维模型示意图
3.1 水下机械臂D-H参数的确定
本文通过修正D-H法来建立七自由度水下机械臂的运动学模型[5-9]。首先,在基座处建立基坐标系O0X0Y0Z0,然后通过齐次变换矩阵及右手定则建立水下机械臂其余各关节坐标系[10],如图4所示。
表2为根据关节坐标系而得到的各连杆D-H参数。其中,以基座中心为坐标原点,扭角αi-1表示Zi-1轴绕Xi-1轴旋转到Zi轴方向的角度,连杆长度ai表示Zi-1轴沿Xi-1轴方向到Zi轴的距离,连杆偏距di表示Xi-1轴沿Zi轴方向到Xi轴的距离,关节夹角θi表示Xi-1轴绕Zi轴旋转到Xi轴方向的角度,i=1,2,…,7。
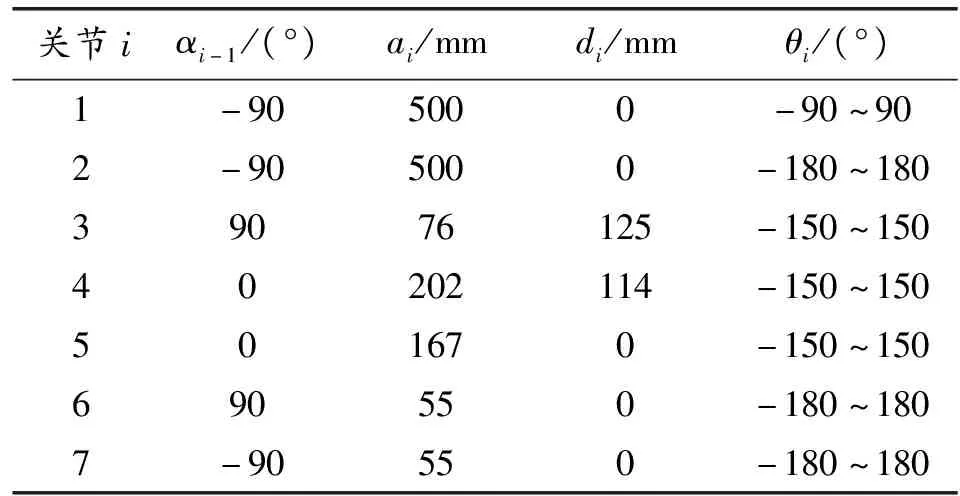
表2 水下机械臂各连杆D-H参数
3.2 水下机械臂逆运动学的求解
逆运动学是指通过机械臂末端位姿来求得各关节转角,在求解多自由度机械臂逆解时,单独采用数值法往往计算量大,且不利于实时控制。本文利用解析法和数值法来对水下机械臂的运动学逆解进行计算[11-13]。
由图4可知,关节2和6的旋转轴线与连杆共线,则水下机械臂的末端位置由关节1、3、4、5和7确定,且关节1、3、4、5和7中存在一个冗余关节,所以存在多组运动学逆解。
图5为水下机械臂的结构示意图,可以方便各关节转角的求解[14]。其中,基坐标系O0X0Y0Z0用点O表示,坐标系O1X1Y1Z1和O2X2Y2Z2用点A表示,坐标系O3X3Y3Z3和O4X4Y4Z4用点B表示,坐标系O5X5Y5Z5和O6X6Y6Z6用点C表示,坐标系O7X7Y7Z7用点D表示。点A、C、D由水下机械臂末端姿态确定,在三角形ABC中过点B作直线AC的垂线交AC于点M,则点B的轨迹为以点M为圆心且绕直线AC旋转的一个圆。
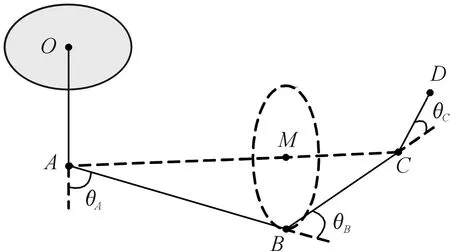
图5 水下机械臂结构示意图
设点A在坐标系O1X1Y1Z1中的坐标为(l1,0,0),AB=l2,BC=l3,点C在坐标系O7X7Y7Z7中的坐标为(0,-l4,0),AC=l5,则由水下机械臂的D-H参数可知:l1=a1+a2cosθ1,l2=a3+a4,l3=a5+a6,l4=a7。则点C在基坐标系O0X0Y0Z0中的坐标(xc,yc,zc)为:
(2)
点B的轨迹可由其与点A、C的距离确定:
(3)
式(3)中:点B的轨迹为以点M为圆心;t为半径的圆,其中
(4)
由水下机械臂的D-H参数可知:θA=|θ2|,θB=|θ4|,θC=|θ6|,θ2、θ4、θ6取正负时均不干涉,所以可求得机械臂8组运动学逆解。
1)求解θ1:
由点B在面X0OoZo上的投影坐标(xB,zB)可得:
(5)
2)求解θ2:
机械臂关节3的坐标(x3,y3,z3)为:
(6)
θ2为轴Z3绕AB顺时针旋转之后与轴Z1的夹角,则有:
(7)
式(7)中,当夹角为锐角时,sgn()=1;否则,sgn()=-1。
3)求解θ3:
联立式(3)、式(4)可求得B点坐标,从而可以求出AB、BC的长度,则在△ABC中有:
(8)
4)求解θ4、θ5:

(9)
式(9)中,n、o、a的3个分量分别为水下机械臂末端坐标系X、Y、Z轴在基坐标系3个坐标轴上的投影,p的3个分量为水下机械臂末端坐标系原点在基坐标系3个坐标轴上的值。以上参数均由水下机械臂末端位姿确定。则由:
(10)
可求得θ4、θ5的解。
5)求解θ6:
由式(11):
(11)
可求得
θ6=atan2(sinθ6,cosθ6)
(12)
6)求解θ7:
nxsinθ2-nycosθ2=cosθ7sinθ6
(13)
oxsinθ2-oycosθ2=-sinθ7sinθ6
(14)
联立式(13)、式(14)可以求得θ7的解。
3.3 计算目标任务逆解
当所求机械臂位姿存在多组运动学逆解时,根据本文要实现的动作,选取其中能实现最佳路径且能量最优的一组解。
已知七自由度水下机械臂初始末端位姿为:
(15)
根据实际工作要求设置目标位置坐标点G(669,-90,926),目标位姿矩阵为:
(16)
通过Matlab计算得到水下机械臂在目标位姿下的8组运动学逆解,为了选取最符合本文作业需求且路径最短、能量最优的一组解,利用ADAMS建立水下机械臂的虚拟仿真模型[16]。在适当减少计算量并保证结果正确的前提下对模型的基座连杆和连杆1进行了等效处理,如图6所示。
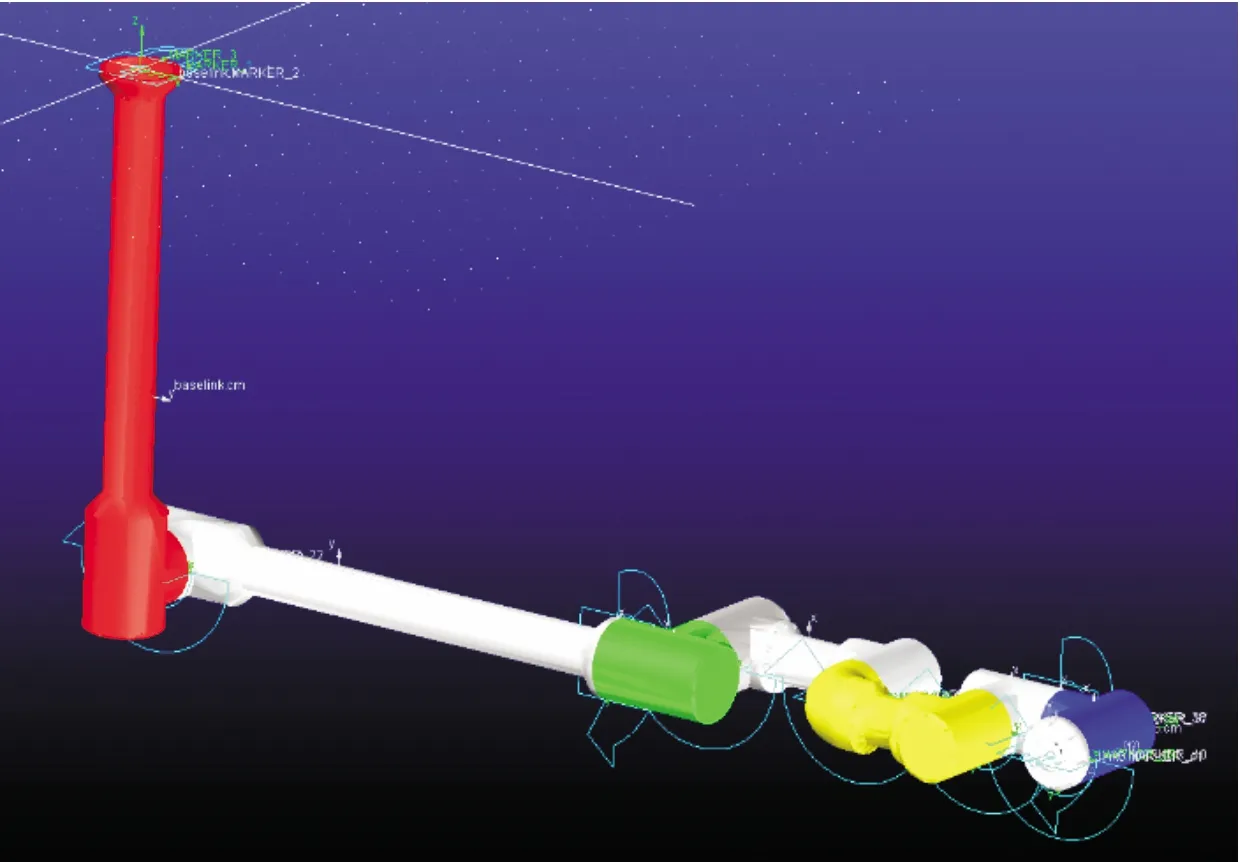
图6 水下机械臂ADAMS虚拟模型图
表3为根据水下机械臂的初始位置选取的满足路径最短、最符合要求的一组逆解。

表3 水下机械臂关节初始角及逆解
根据表3中求得的水下机械臂各关节逆解,在ADAMS中设置机械臂每个关节的驱动函数,并将仿真得到的机械臂末端位置与目标位置进行对比,对运动学模型及所求逆解进行验证。各个方向的位置误差为:X向误差为0.5 mm,Y向误差为0.4 mm,Z向误差为0.8 mm,误差均在合理范围内。
4 水下机械臂仿真实验及结果分析
4.1 水下机械臂仿真实验
为了提高舰船水下应急维修的自动化水平,本文采用水下机械臂代替人力解决舰船水下问题,而直接利用水下机械臂在实际环境中进行舰船的水下实验造价成本高,实现难度大。因此本文在相关理论知识的基础上,在ADAMS仿真软件中建立水下机械臂的虚拟实验平台,在水下机械臂末端安装切割刀,模拟水下机械臂末端切割工具沿着螺旋桨叶片运动,并对水下机械臂运动到螺旋桨不同位置的操控稳定性进行分析验证。
选取螺旋桨叶片上3个不同位置状态点,3个状态点的关节角位移通过逆运动学方程求得,并约束3个状态点的关节角速度和角加速度。运用求解出的3个位置点的运动学逆解,使用IF函数对水下机械臂每个关节添加驱动。设置机械臂模型中运动副1即基座与载体结构连接处为固定副,其余均为旋转副。整个工作时间设置为6 s,图7为水下机械臂末端切割工具运动到螺旋桨不同位置的仿真效果图。
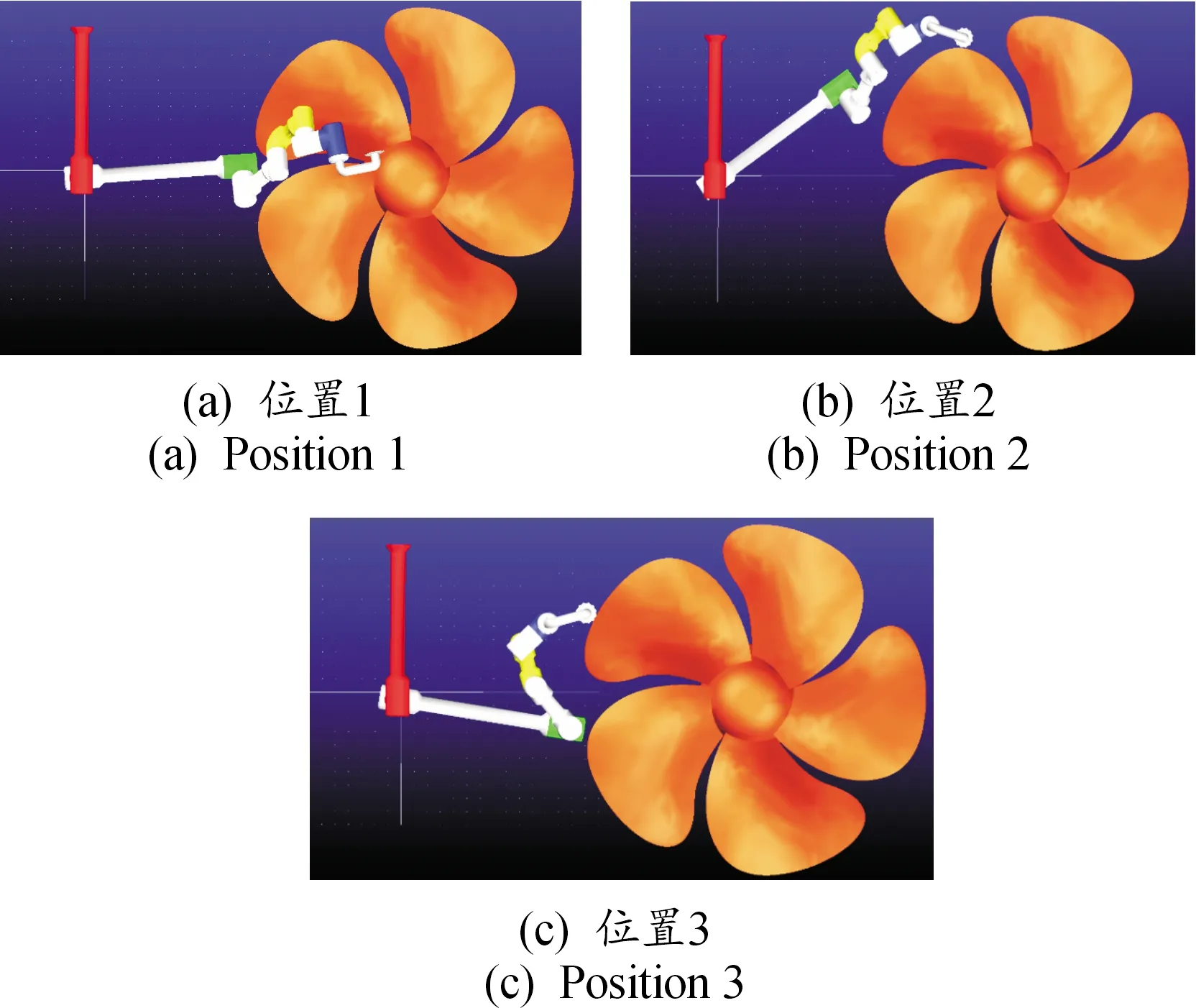
图7 水下机械臂运动过程图
从图7水下机械臂的运动过程图可以看出,水下机械臂运动连续,运动到不同位置时与所求得的关节逆解的误差较小,系统的控制性和稳定性较好。
4.2 结果分析
调用ADAMS后处理模块得到水下机械臂运动副1的受力和力矩变化、驱动1的力矩变化、机械臂末端位置、角速度和角加速度在不同方向的曲线分别如图8~图13所示。

图8 运动副1受力曲线
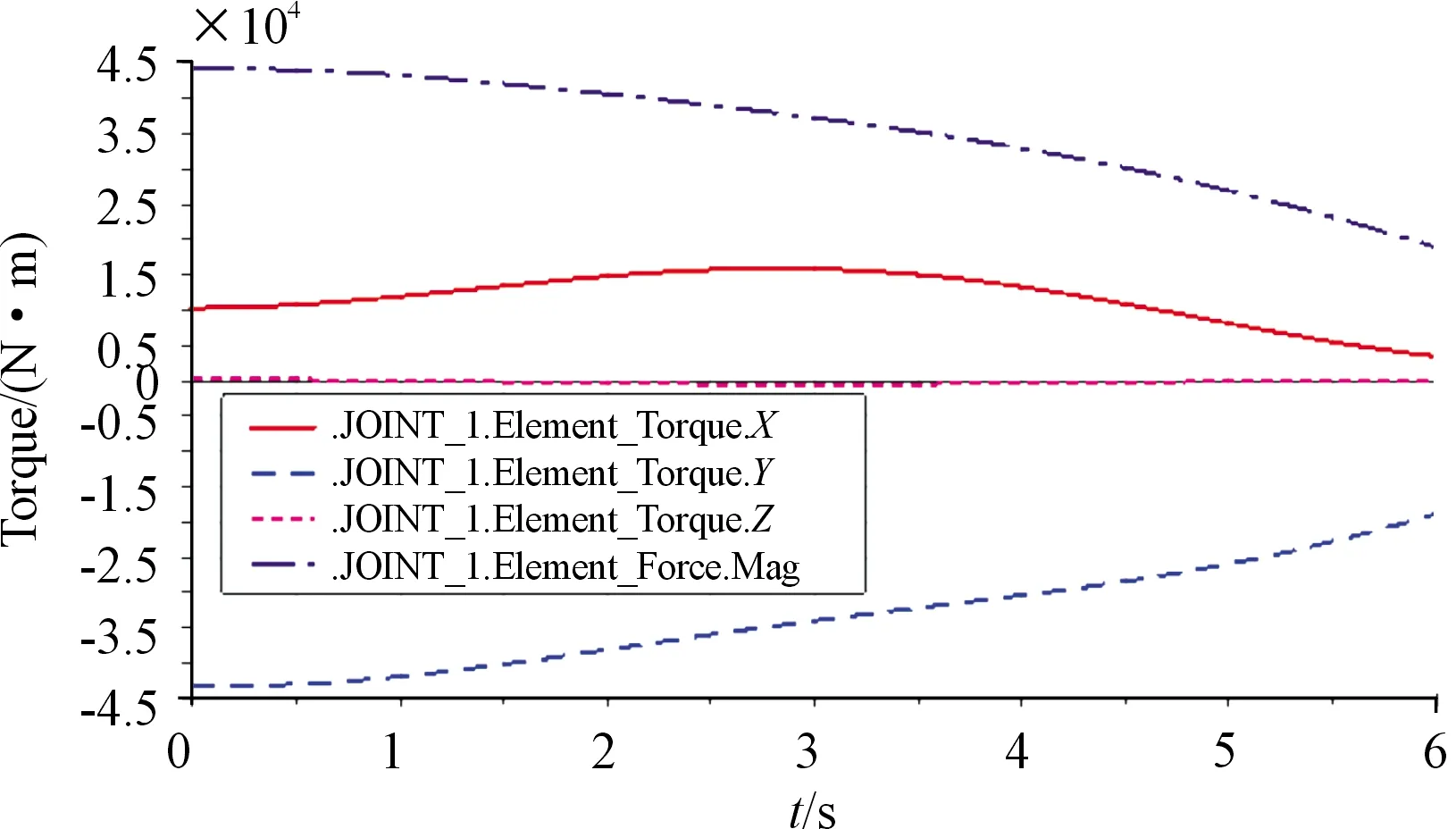
图9 运动副1力矩曲线

图10 驱动1的力矩曲线
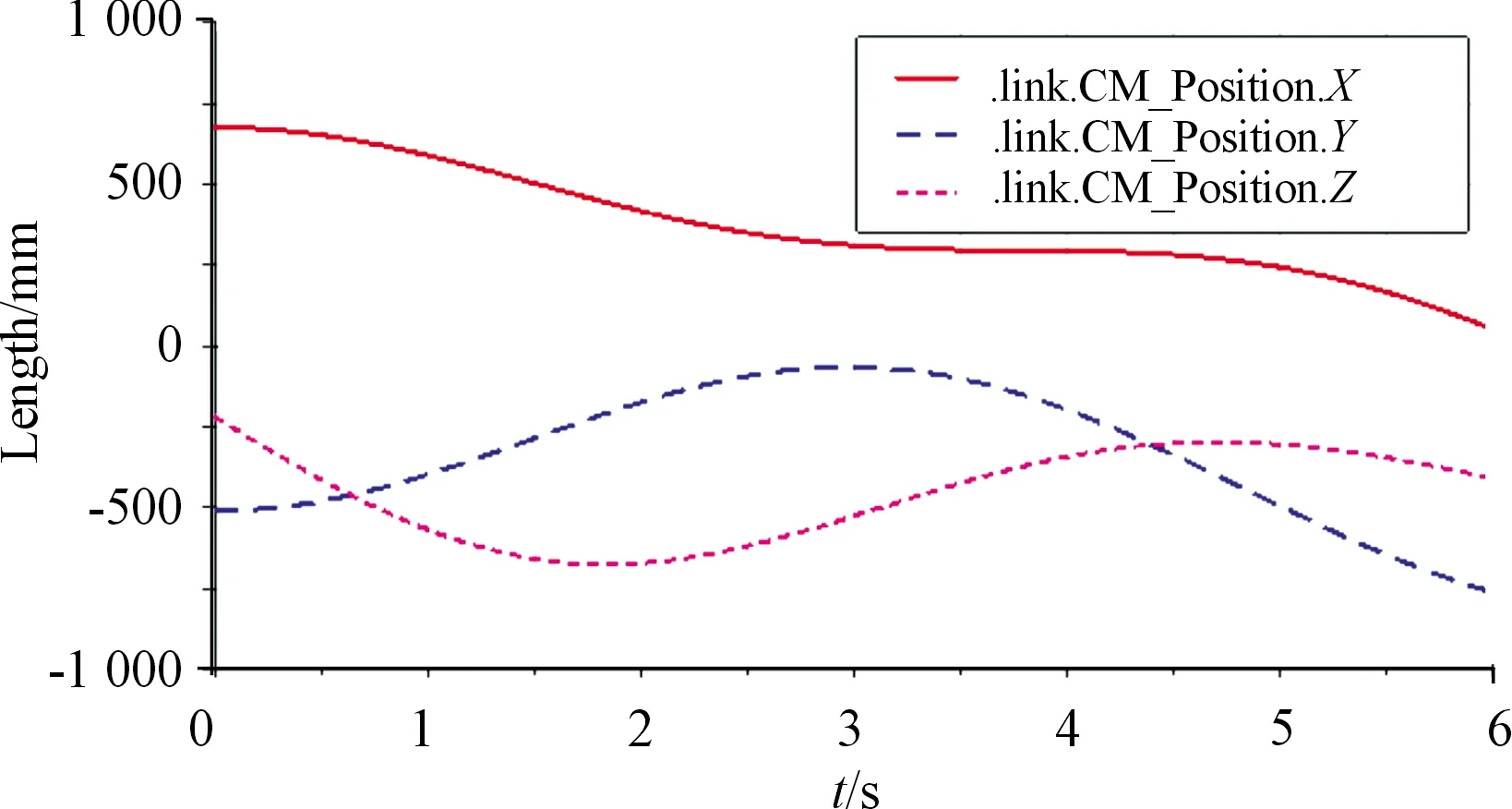
图11 水下机械臂末端位置曲线
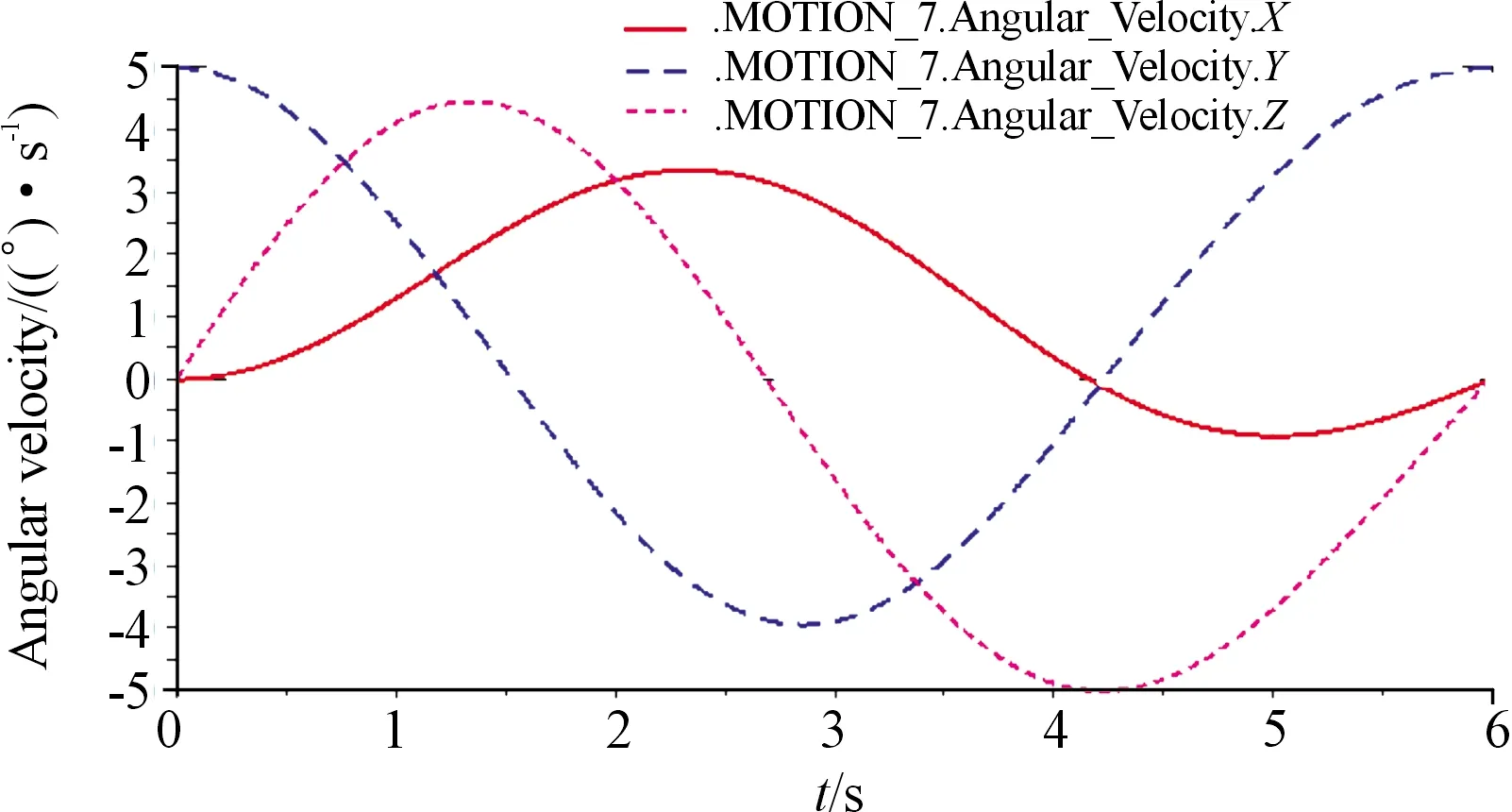
图12 水下机械臂末端角速度曲线

图13 水下机械臂末端角加速度曲线
由图8和图9可知,在水下机械臂的运动过程中载体结构主要受到Z方向的力作用,最大受力为80.8 N,载体结构在机械臂的初始位置受到最大力矩为44.5 N·m,均远小于水下机械臂载体结构的承载能力极限,即水下机械臂在运动过程中对载体结构的扰动很小,所以载体结构可以保证水下机械臂的位置精度要求。
由图10可知,驱动1即运动副2处的最大驱动力矩为43.7 N·m,运动副2为增大水下机械臂的作业范围而增加的一个旋转副,小于水下电机的额定转矩75 N·m,满足要求,可以保证水下机械臂的正常驱动。
由图11可知,0~2 s,机械臂由起始位置运动到位置1;2~4 s,机械臂由位置1运动到位置2;4~6 s,机械臂由位置2运动到位置3。曲线平滑连续,运动平稳。水下机械臂在整个运动过程中没有出现奇异现象。水下机械臂控制效果较好,机械臂末端可以稳定地运动到螺旋桨不同位置进行作业。
由图12可知,水下机械臂在不同的位置段速度大小不一样且曲线变化平滑连续,机械臂速度分配合理,可以保证机械臂平稳地运动到螺旋桨不同位置。
由图13可知,水下机械臂在整个运动过程中加速度变化大小保持在较小范围内,没有出现突变,说明水下机械臂可以平稳的过渡到不同位置。
综上所述,水下机械臂在沿着螺旋桨的叶片运动时,机械臂的整体协调性较好,运动平稳。
经过多次仿真实验,可以得到水下机械臂末端作业工具运动到螺旋桨不同位置时机械臂各个关节的位置误差,如表4所示。
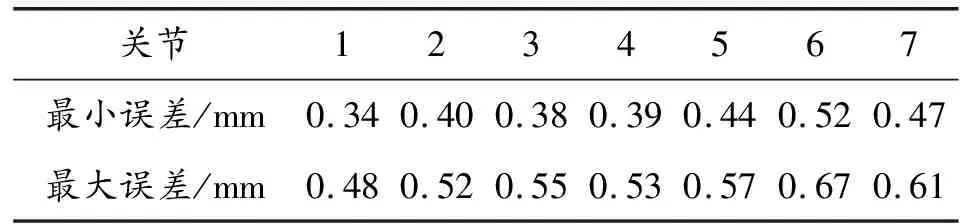
表4 不同目标位置水下机械臂各关节位置误差
由表4中的结果计算得到水下机械臂末端运动到目标位置的平均误差为0.49 mm,方差为0.008 mm2,且多次实验过程中,机械臂与螺旋桨均无碰撞,说明该七自由度水下机械臂的操控稳定性较好。
5 结论
1)对水下机械臂载体结构进行了设计和强度、刚度的校核,结果表明载体结构可以输送并搭载水下机械臂实现舰船停留在水面上时对船体水下部分进行水下应急维修作业。
2)通过ADAMS仿真对七自由度水下机械臂的运动学模型及所求逆解进行了验证,结果表明各关节误差均在合理范围内。
3)模拟机械臂末端切割工具沿着舰船螺旋桨叶片运动,载体结构、增加的旋转关节均符合设计要求,水下机械臂运动平稳,协调性和控制性较好,可以按预期实现水下机械臂末端作业工具运动到螺旋桨不同位置进行操作任务。
以上结论可为舰船水下应急维修结构设计以及水下机械臂操控稳定性分析提供参考。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
舰船科学技术(2021年12期)2021-03-29 01:28:44
航空发动机(2020年3期)2020-07-24 09:03:16
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
舰船科学技术(2016年1期)2016-02-27 15:39:26
海军航空大学学报(2015年1期)2015-11-11 17:18:37
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
机械制造与自动化(2014年1期)2014-03-01 04:22:01
