
基于子孔径处理的大斜视SAR 点目标仿真
2021-11-08 12:47吴佳晔顾丹丹
上海航天 2021年5期
吴佳晔,顾丹丹,刘 鹏
(1.复旦大学 信息科学与工程学院 电磁波信息科学教育部重点实验室,上海 200433;2.上海航天技术研究院电磁散射重点实验室,上海 200438)
0 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是现代遥感领域重要技术手段,能够全天时、全天候进行高分辨成像,具有重要的军事和民用价值[1]。成像算法是SAR 提高分辨率的核心技术之一。在众多的成像算法中,子孔径算法因在成像性能、运动补偿和成像效率方面独特的优势而受到重视[2]。子孔径处理可使成像分辨率与效率达到平衡[3-4],既保证了实时性,又避免了长时间数据录取导致的方位向相位误差增大等缺陷。除此之外,随着成像技术的发展,与精确制导技术结合的弹载SAR 也已成为研究热点[5-6]。对于弹载SAR,斜视成像是一种重要工作模式[7],并且,为实现快视成像,弹载SAR 大多以牺牲一定的分辨率为代价,采用子孔径数据进行相干处理[8]。
机载、弹载SAR 平台飞行过程中稳定性一般较差,当方位向分辨率要求较高时,信号积累需要长的合成孔径时间[9],弯曲轨迹下的运动参数变化剧烈,多普勒模糊现象加剧,因此直接在全孔径处理成像聚焦难度较大。子孔径算法将全孔径分为若干子孔径,近似认为每个子孔径内机载平台的速度稳定,且运动参数变化不大,对每个子孔径分别处理成像后进行拼接合成,得到全孔径图像。
本文采用大斜视角距离多普勒(Range-Doppler,RD)算法进行子孔径的仿真成像。首先对大斜视角下的RD 算法进行全孔径成像公式推导,然后分割子孔径进行算法处理。在构建仿真平台时,可以增加任意角度的斜视角或任意方向的运动误差。仿真成像结果通过等高线图及点散布函数加以验证。
1 斜视SAR 成像几何模型
斜视SAR 机载平台成像几何示意图如图1 所示。图中,O点为全孔径中心时刻机载平台所处的位置。以O点为坐标原点,雷达航向为横轴,建立直角坐标系。设机载平台沿航线作匀速直线运动,速度为V,斜视角为θ0,机载平台到地面场景中心点即点目标P的最近距离为Rb,斜视波束到地面场景与过点目标的航向平行线交点之间的距离为Rs。
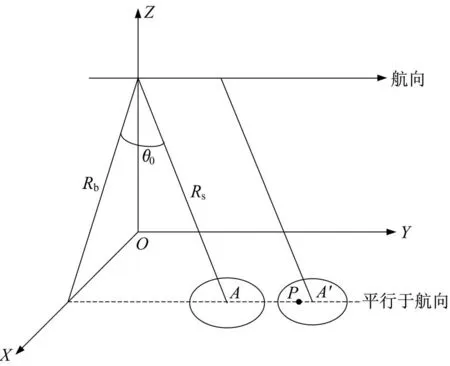
图1 斜视SAR 成像几何模型Fig.1 Imaging model for squint SAR
为了后续讨论斜距与慢时间tm的关系以及推导信号模型,将三维成像几何模型变换为XOY二维平面讨论几何关系,如图2 所示。
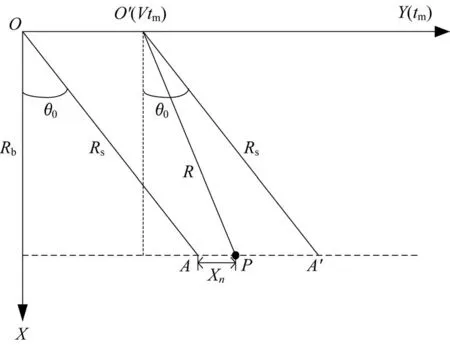
图2 斜视SAR 成像平面Fig.2 Imaging plane of squint SAR
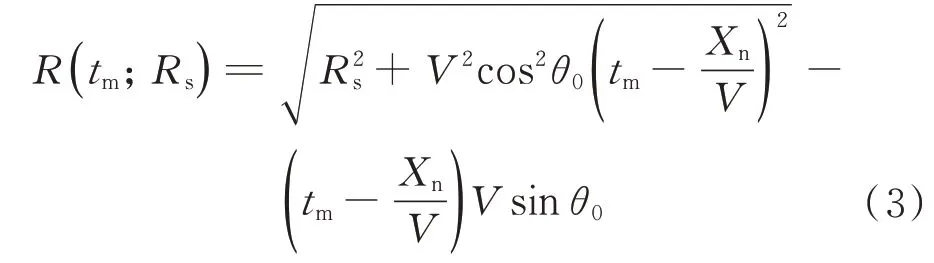
经过时间tm后,机载平台从O点移动到O′点处,雷达波束与地面场景的交点从A移动到A′点,AA′距离即机载平台移动的距离。设tm为0 的时刻雷达波束与地面场景交点到点目标P的距离为Xn,那么在三角形O′PA′中可以得到斜距R与tm关系的表达式为

将式(1)斜距表达式泰勒展开到二次项以后,代入接收的回波基频信号,即可得到大斜视角下的点目标回波基频信号为
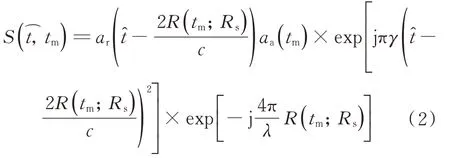
式中:ar、aa分别为线性调频信号的距离窗函数和方位窗函数;γ为调频率;c为光速;λ为中心频率对应的波长。
此时,
式中:V为机载平台的飞行速度。
2 基于子孔径处理的大斜视RD 算法思路和流程
2.1 大斜视RD 算法
首先在距离频域进行距离走动的补偿,当距离移动量ΔR已知时,距离走动的补偿相位因子[10-11]为
式中:fr为距离频率。
根据R的表达式,对多普勒中心进行补偿即一级运动补偿,补偿的相位因子为

距离走动校正和多普勒中心补偿后,对信号进行距离压缩。在大斜视角及运动误差较大的情况下,距离弯曲多在方位多普勒域进行校正,因此将距离压缩后的信号变至距离频域-方位多普勒域,有
式中:σn为距离压缩后的信号幅度;fa为方位频率;fc为中心频率
变换时忽略了空变性,即将场景中各点的距离弯曲都用场景中心点Rs0处的值进行近似,由于大斜视角影响,调频率由初始线性调频信号(LFM)信号的γ变为γe。
根据式(6)的最后一项,可以看出信号的距离向和方位向存在耦合,即存在距离弯曲,由此得到弯曲校正函数为

用式(7)进行补偿后,距离徙动被基本校正。
二级运动补偿即多普勒调频率补偿。机载平台在每一时刻的瞬时速度都可以看成平均速度与扰动速度之和[12-13],其矢量速度会影响斜距,斜距的变化会造成调频率的变化,因此每一时刻也存在着瞬时调频率。当速度的变化已知,就可以反推出每一时刻的调频率误差,再对误差进行二次积分即可得到调频率的补偿相位因子[14-15],即

式中:Δφ=∬Δγm(tm)dtm;fdr为需要校正的多普勒调频率。
若不考虑高次运动相位误差带来的影响,在经过两次运动补偿后,运动误差已经基本补偿完毕。
最后将信号变到方位多普勒域进行方位压缩,此时的信号表达式为
根据式(9),方位向匹配滤波函数为

方位匹配滤波函数中包含与斜视角相关的部分,θ0即大斜视带来的影响。而传统RD 算法的方位匹配滤波函数表达式为

后续仿真验证时,将分别使用这两种方位匹配滤波器进行成像对比分析。
对信号方位压缩处理后,再进行方位向快速傅里叶逆变换(Inverse Fast Fourier Transform,IFFT),将信号变至二维时域,最终得到的信号为
由式(12)可以看出,最终图像会存在几何形变。
2.2 基于子孔径处理的算法流程
采用子孔径处理算法,将方位孔径分段,是为了减小全孔径的运动补偿复杂度[16-17]。对于复杂弯曲轨迹下的成像,子孔径算法也可以提高精度。本文采用2 种方法进行子孔径处理:第1 种方法,只在子孔径进行一级运动补偿,即不完全运动补偿;第2种方法,既在子孔径里进行一级运动补偿,又进行二级运动补偿,即完全运动补偿。
子孔径不完全运动补偿流程如图3 所示,主要步骤如下:

图3 子孔径不完全运动补偿流程Fig.3 Compensation process of incomplete subaperture motion
步骤1将全孔径的原始信号进行含有重合段的子孔径分割,重合是为了保证后续拼接对准。
步骤2对每个子孔径数据分别进行一级运动补偿即多普勒中心的补偿和距离走动校正;
步骤3对每个子孔径数据做距离压缩;
步骤4将子孔径数据进行拼接,拼接后在全孔径进行距离弯曲校正和调频率误差补偿;
步骤5进行方位压缩得到最终SAR 图像。
在子孔径里进行完全运动补偿流程图,如图4所示。
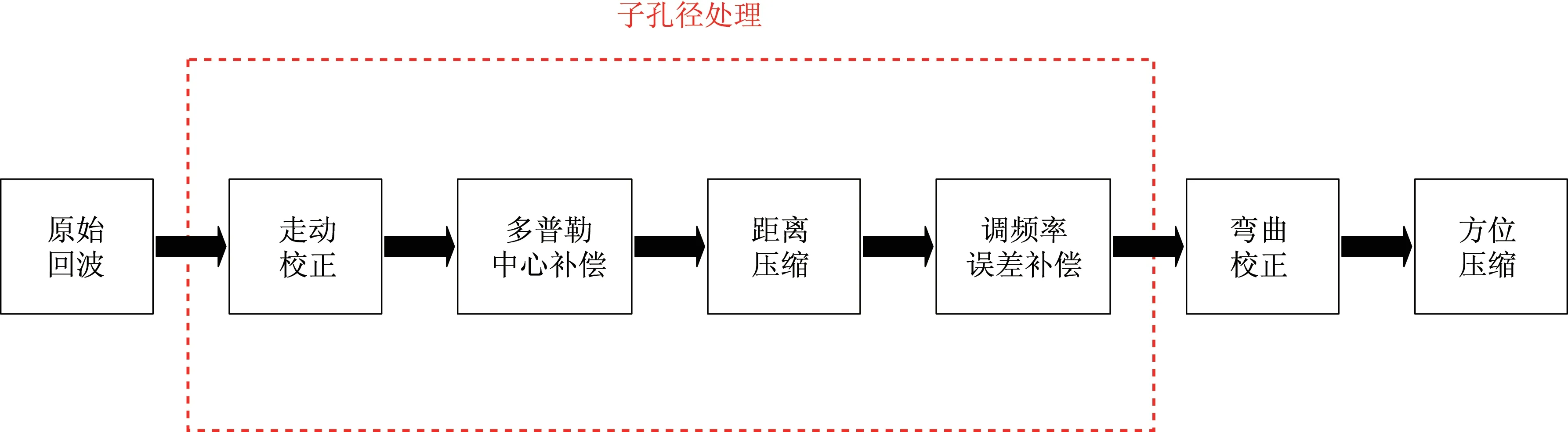
图4 子孔径完全运动补偿流程Fig.4 Compensation process of complete subaperture motion
3 仿真试验及结果分析
为了验证子孔径处理算法的正确性,本文展示了仿真实验结果,仿真参数见表1。
仿真几何根据图1 建立,机载平台以150 m/s 的速度沿Y轴方向运动,点目标位于XOY平面,雷达参数见表1,理想情况下斜视角和速度误差均为0。仿真时将全孔径分割为含有重合部分的16 段子孔径,运动误差模拟机载平台行进方向的速度误差,造成的位置误差为正弦函数形状,斜视角为20°,横向为方位向,纵向为距离向。

表1 点目标仿真参数Tab.1 Simulation parameters of point targets
为了对比采用大斜视算法和传统RD 算法的方位匹配函数处理后的成像结果,主要利用Contour图和方位向点散布函数展示两者聚焦效果。
3.1 子孔径不完全运动补偿
3.1.1 单点目标仿真
在理想情况,即正侧视(即斜视角为0°)、无运动误差的条件下,采用传统RD 算法的方位匹配函数和本文大斜视算法的方位匹配函数得到的单点目标等高线图及点散布函数,如图5 所示。等高线图为十字形,点散布函数也近似为sinc 函数形状,第一副瓣低于20 dB,满足工程要求,故两种指标图均反映点目标已精确聚焦。
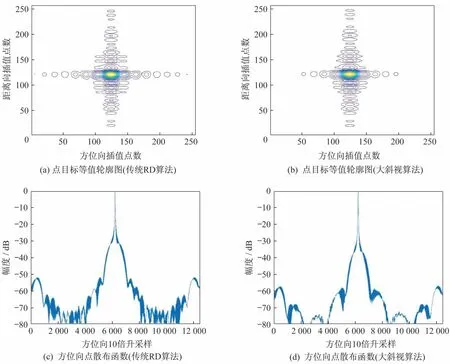
图5 子孔径方法1:正侧视、无运动误差情况单点成像Fig.5 Subaperture method 1:single point imaging with broad-side looking and no motion error
在正侧视、有运动误差的条件下,等高线图和点散布函数如图6 所示。图中可见,点目标的聚焦情况较理想条件下差,旁瓣的散焦可认为是由运动误差造成。但从点散布函数分析,旁瓣均低于-20 dB,符合工程使用要求,因此也可以认为是精确聚焦。
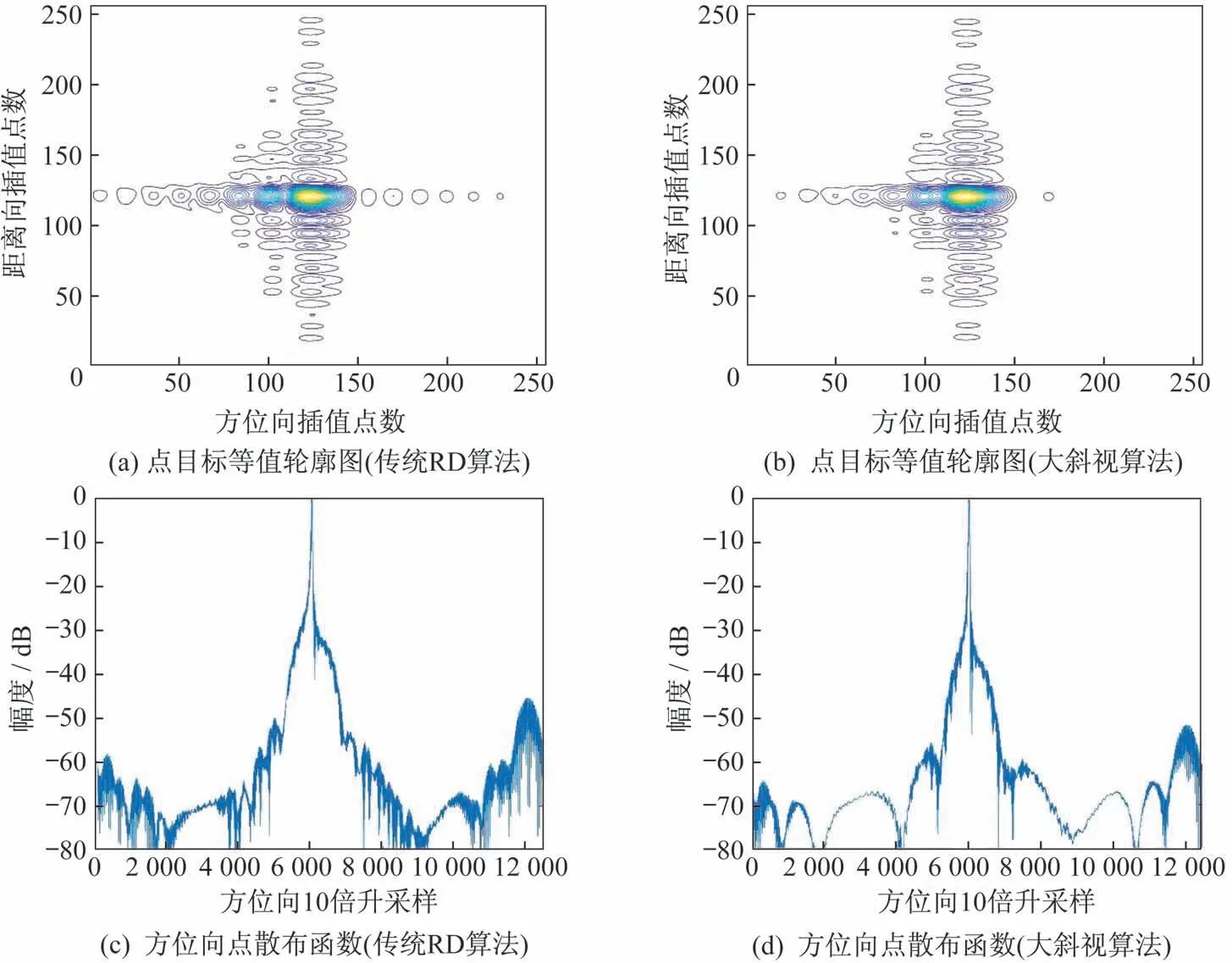
图6 子孔径方法1:正侧视、有运动误差情况单点成像Fig.6 Subaperture method 1:single point imaging with broad-side looking and motion error
在斜视、无运动误差的条件下,仿真结果如图7所示。若采用传统RD 算法的方位匹配函数,点目标将散焦,方位点散布函数的分布(如图7(c)和图7(d)所示)也予以证明已不再是sinc 函数形状。
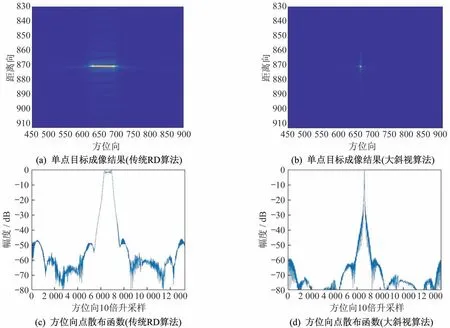
图7 子孔径方法1:斜视、无运动误差情况单点成像Fig.7 Subaperture method 1:single point imaging with squint looking and no motion error
根据以上3 种情况的仿真结果,采用传统RD 算法的方位匹配函数进行处理,对正侧视和有运动误差的情况下可以精确成像,但对于大斜视角下的场景会造成方位向散焦。而采用本文大斜视角下的方位匹配函数,对3 种情况都可以精确聚焦。将斜视角θ0=0 代入大斜视算法下的方位匹配函数,就退化为正侧视和小斜视角情况下的匹配函数,因此具有广泛适用性。
3.1.2 多点目标仿真
在正侧视、无运动误差条件下,将成像后的一行目标放大,如图8(a)所示,两种算法的匹配函数都会带来边缘点的散焦。这是因为两种算法都是基于对场景中心点补偿进行的公式推导,对空变性进行了近似处理。虽然都会带来散焦,但传统RD算法的匹配函数在边缘点的散焦情况更为严重,观察结果图的左右两点即可看出。为了更精确展示多点成像结果,中间行的点散布函数如图8(c)和图8(d)所示。图中可以更清晰看出:中间点的聚焦效果最好,仍为sinc 函数形状,副瓣也低于-20 dB;而边缘点的整体形状虽然可以近似认为是sinc 函数,且旁瓣也均低于-20 dB,但相比中间点的点散布函数分布,确实存在部分失真,即轻微散焦。
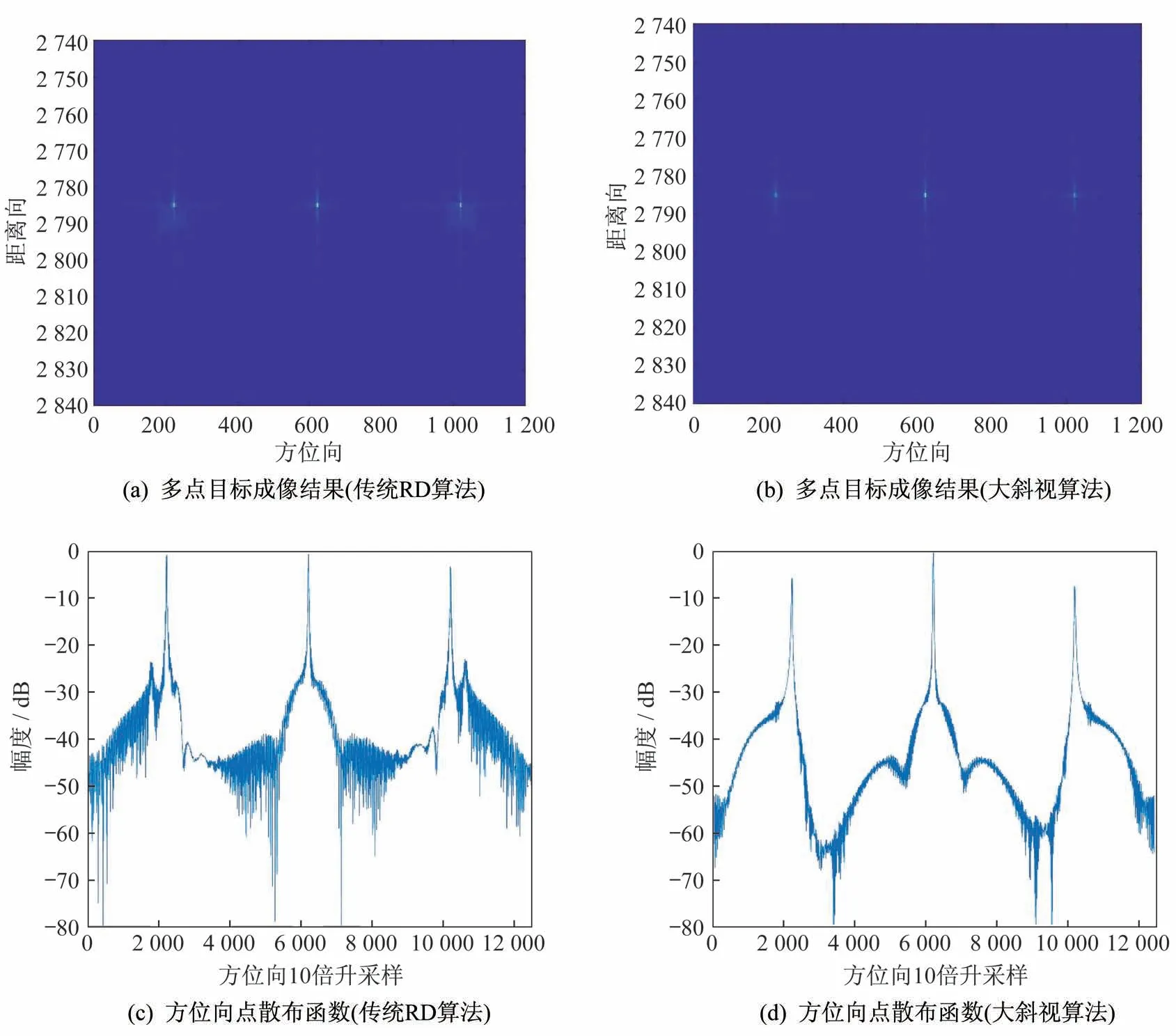
图8 子孔径方法1:正侧视、无运动误差情况多点成像Fig.8 Subaperture method 1:multipoint imaging with broad-side looking and no motion error
与没有运动误差的条件类似,正侧视、有运动误差时也产生了边缘点散焦的情况。同样将成像后的一行目标放大,观察传统RD 算法带来的散焦具体情况与没有运动误差条件不完全相同,如图9(a)所示,左右两点的散焦情况与图8(a)中并不完全相同,这是因为运动造成了成像拖尾,异于空变性引起的散焦。图9(c)和图9(d)点散布函数也可以看出,中间行点目标的旁瓣均低于-20 dB,但边缘点的sinc 函数形状有部分失真,即点目标会有轻微散焦。
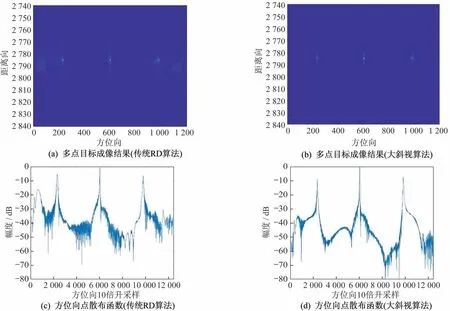
图9 子孔径方法1:正侧视、有运动误差情况多点成像Fig.9 Subaperture method 1:multipoint imaging with broad-side looking and motion error
仿真结果如图10 所示,在斜视、无运动误差的条件下产生了几何形变,符合大斜视角下算法处理后的信号表达式。将采用本文大斜视公式成像后的中间一行放大,可以看出基本都已精确聚焦。与单点目标相同,传统RD 算法仍然在大斜视角情况下造成方位向散焦。
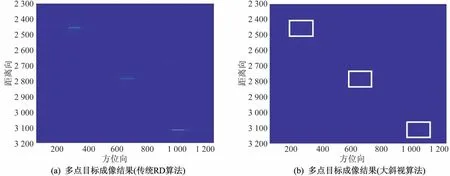
图10 子孔径方法1:斜视、无运动误差情况多点成像Fig.10 Subaperture method 1:multipoint imaging with squint looking and no motion error
3.2 子孔径完全运动补偿
3.2.1 单点目标仿真
在正侧视、无运动误差的条件下,仿真结果如图11 所示,等高线图显示点目标已聚焦。
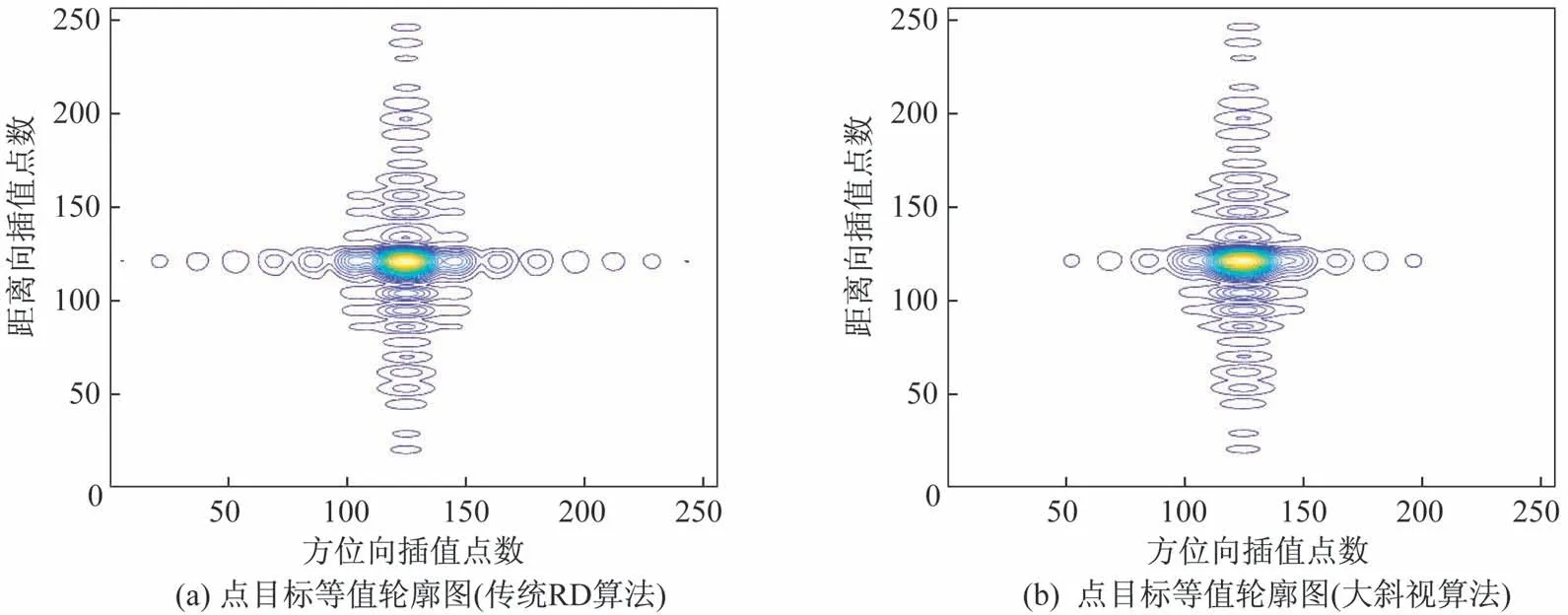
图11 子孔径方法2:正侧视、无运动误差情况单点成像Fig.11 Subaperture method 2:single point imaging with broad-side looking and no motion error
在正侧视、有运动误差的条件下,仿真结果如图12 所示,类似子孔径不完全运动补偿方法,完全运动补偿也会造成成像拖尾,聚焦效果没有理想情况好。
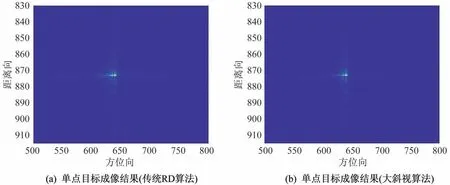
图12 子孔径方法2:正侧视、有运动误差情况单点成像Fig.12 Subaperture method 2:single point imaging with broad-side looking and motion error
在斜视、无运动误差的条件下,仿真结果如图13所示,传统RD算法的方位匹配函数会造成方位向散焦。
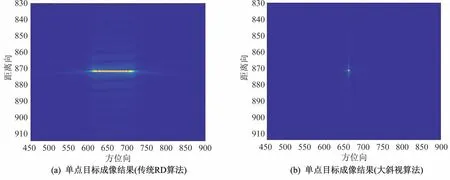
图13 子孔径方法2:斜视、无运动误差情况单点成像Fig.13 Subaperture method 2:single point imaging with squint looking and no motion error
与只在子孔径里的运动补偿相同,除了大斜视角下的成像,两种算法的方位匹配函数都可以对点目标精确聚焦,大斜视角下,传统RD 算法会造成散焦。
3.2.2 多点目标仿真
在正侧视、无运动误差的条件下,仿真结果如图14 所示。
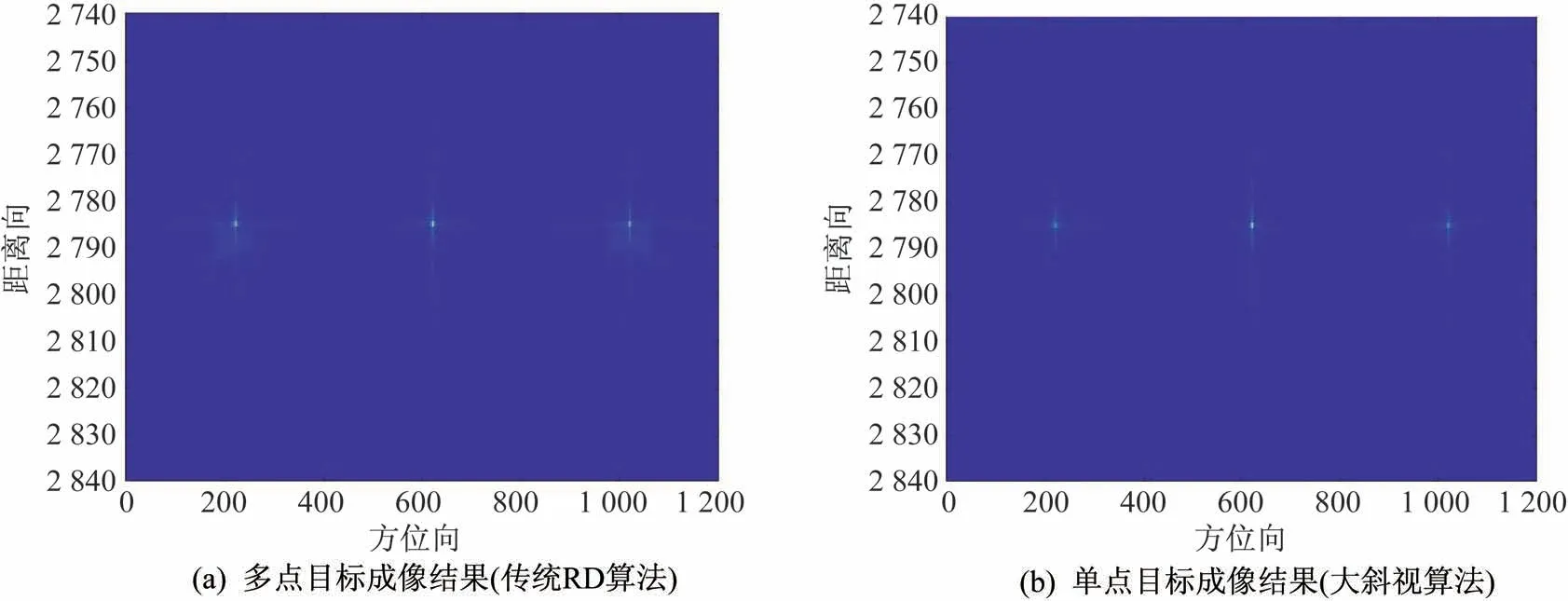
图14 子孔径方法2:正侧视、无运动误差情况多点成像Fig.14 Subaperture method 2:multipoint imaging with broad-side looking and no motion error
在正侧视、有运动误差的条件下,仿真结果如图15 所示。
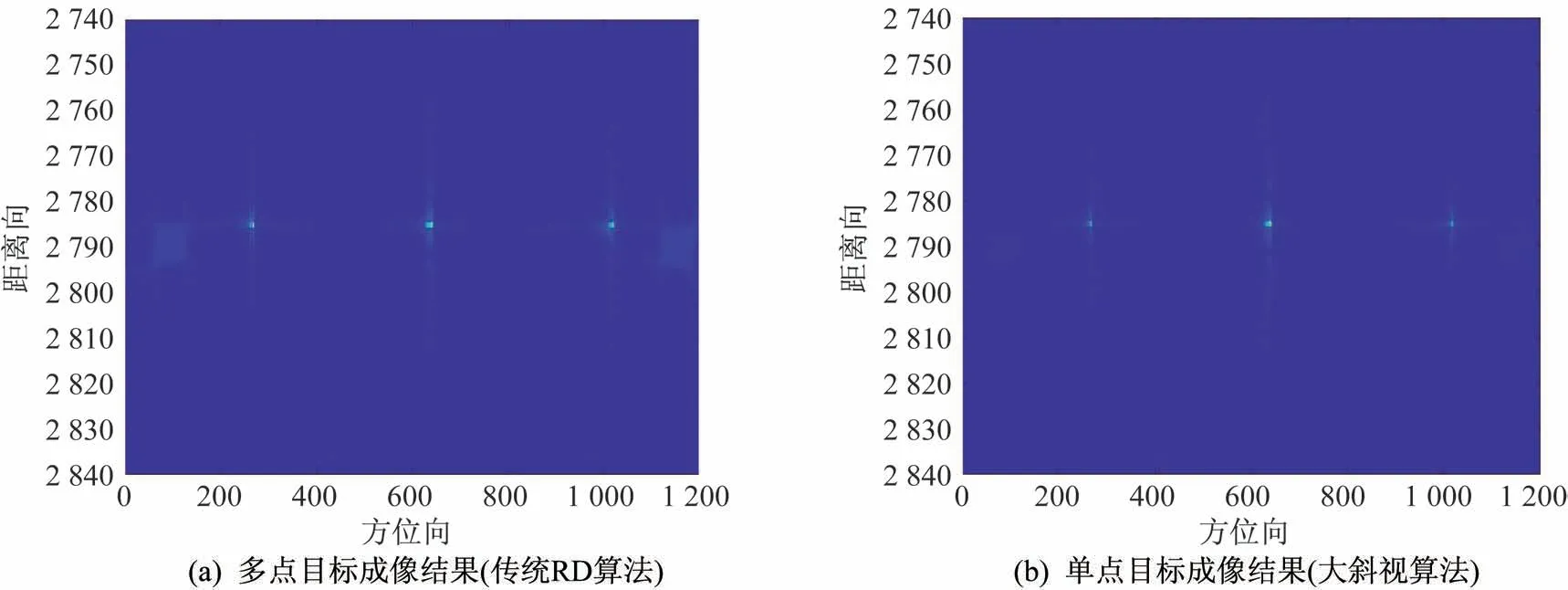
图15 子孔径方法2:正侧视、有运动误差情况多点成像Fig.15 Subaperture method 2:multipoint imaging with broad-side looking and motion error
在斜视、无运动误差的条件下,仿真结果如图16 所示。
从图14~图16 得出的分析结论与子孔径里只处理多普勒中心的补偿分析基本一致,这是因为仿真情况的参数比较理想,误差很小,因此是否在子孔径里进行完全运动补偿影响不大。
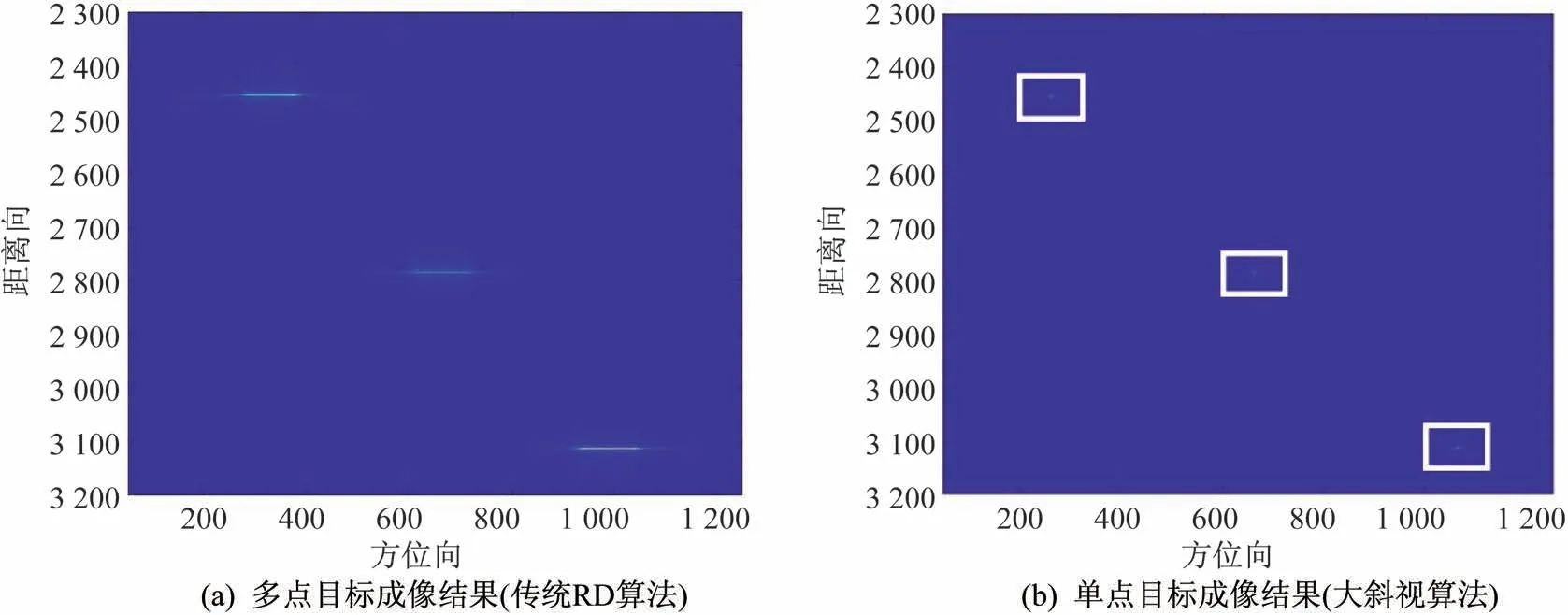
图16 子孔径方法2:斜视、无运动误差情况多点成像Fig.16 Subaperture method 2:multipoint imaging with squint looking and no motion error
4 结束语
考虑到长合成孔径、弯曲轨迹条件下,采用全孔径算法的运动补偿和成像聚焦难度较大,本文研究了子孔径成像处理方法。为了扩大适用性,本文在大斜视角的条件下进行了成像公式的理论推导,并对正侧视、有运动误差和大斜视角3 种情况,采用将全孔径分为含有重合部分的16 段子孔径处理方法进行成像,并采取两种子孔径运动补偿方法,按照子孔径不完全运动补偿和完全运动补偿,分别进行了单点目标和多点目标的仿真。两种子孔径处理方法均显示与传统RD 算法的方位匹配函数相比,大斜视角下的子孔径成像方位匹配函数可以精确聚焦。仿真结果表明了本文方法的正确性。
猜你喜欢
雷达科学与技术(2022年5期)2022-10-26
农业工程学报(2022年10期)2022-08-22
军事文摘(2021年24期)2022-01-11
康颐(2020年14期)2020-11-10
中老年健康(2016年1期)2016-03-07
小学生时代·大嘴英语(2015年7期)2015-11-23
中华家教·幼儿版(2014年6期)2014-09-15
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16
祝您健康(1987年4期)1987-12-29
