尾灯特征的ADAS系统前方车辆识别
2021-11-06 12:02敖宏伟陈学文李子柔
重庆理工大学学报(自然科学) 2021年10期
敖宏伟,陈学文,李子柔
(辽宁工业大学 汽车与交通工程学院, 辽宁 锦州 121001)
目前,汽车安全辅助驾驶系统(ADAS)被广泛用于改善驾驶安全性,通过分析车载传感器信息掌握道路、车辆及周围环境等驾驶信息,并在危机时刻为驾驶员提供劝告或预警信号,甚至对车辆实施控制,减轻驾驶员的操作强度,避免驾驶员因人为因素造成的交通事故[1-5]。
视觉图像中含有丰富的信息,随着图像处理与分析理论的不断成熟,从图像中提取车辆信息已经成为现实可行的办法。可以利用一些先验的知识获取有关车辆的特征信息,找出属于车辆的边缘,以便确定车辆存在的区域,国内外研究工作者就图像中车辆的检测方法进行了广泛研究。Qing等[6]利用车辆的尾灯特征确定车辆的标记区域,针对停车场与道路中行驶车辆分别进行了验证。建立了粒子滤波跟踪器,对检测出的车辆标记区内的车辆实施跟踪控制。Chen等[7-9]基于AdaBoost方法与支持向量机分类器进行了车辆的检测与识别研究,以标记图像窗的形式提取了图像区域内的目标车辆。耿庆田等[10]采用方向可控滤波算法与HOG算法相结合的方法提取车辆的外型特征,通过建立的SVM分类器对所提取出的特征进行训练,识别了车辆的外型特征。Girshick等[11-13]提出了深度学习与高速-区域卷积神经网络方法,主要结合Faster R-CNN和LocNet算法,进行了车辆的检测研究,但小目标没有获得良好的检测和定位。
本文结合车辆尾灯对特征,确定车辆可能存在的感兴趣区域边界。针对检测到的感兴趣区域边界进行车辆的边缘特征与区域特征参数提取,采用构建的径向基神经网络车辆识别器,经过训练后最终确认该区域是否存在车辆。
1 基于车辆尾灯特征的车辆检测方法
1.1 车辆尾灯对特征提取
图1为前方车辆的后部尾灯对结构示意图。从车辆的后部特征可以看出,车辆的尾灯对特征颜色鲜明且有别于其他部位或道路的灰度信息,尾灯对位于车辆的中部位置且左右边缘与车辆宽度基本一致。这些位置、色度与边缘结构特征对于一幅图像中车辆区域的标记是非常关键的。可以利用边缘检测算子提取出图像的物体的边缘信息,然后进一步设置尾灯特有的限制条件,就可以将尾灯对轮廓提取出来。

图1 前方车辆的后部尾灯对结构示意图
从图1中可以看出,尾灯对轮廓信息可以用以下约束条件进行提取:
Wmin≤WLlLr≤Wmax
(1)
|HLcl-HLcr|≤hc
(2)
(3)
式中:WLlLr为图像中尾灯对间的宽度;Wmin与Wmin分别为尾灯对间宽度的最小与最大像素值;HLcl与HLcr分别为图像中左右尾灯的高度;hc为左右尾灯的高度差阈值;ALl与ALr分别为图像中左右尾灯的面积;al与ar分别为图像中左右尾灯对面积比的最小值与最大值。
1.2 车辆存在的感兴趣区域获取
基于尾灯对信息,可以获取尾灯的质心位置,根据质心的中心点,经过形态学运算后便可确定尾灯的标记区域,再利用式(4)给定的车辆图像与实际尺寸转换比例,便可以确定目标车辆的矩形标记区域。
(4)
式中:wf为图像中车宽;hf为图像中车高;WV为实际车辆的宽度;HV为实际车辆的高度;α为比例系数。
上述确定的区域只是作为车辆可能存在的感兴趣区域,该感兴趣区域虽然能够在一定程度上检测出车辆,但依然存在目标混淆或漏检现象,因此,该区域是否存在唯一的车辆目标仍需要进一步结合基于神经网络识别步骤才能更可靠地确定检测区域内的目标。
2 基于RBF神经网络的车辆识别
2.1 车辆目标特征提取
为了准确地识别出车辆目标,需要对检测到的图像区域提取车辆形状特有的特征。本文拟提取车辆的混合特征,同时包含了边缘特征与区域特征共计19个特征参数。
2.1.1离散余弦变换子系数
目标图像经过分割预处理后进行边缘提取,获得外形轮廓数据f(x[n],y[n]),把M个点组成的闭合边缘曲线放到复平面上,形成一维复序列,如式(5)所示。
f(n)=x(n)+jy(n) (1≤n≤m)
(5)
对式(5)进行离散余弦变换如下。
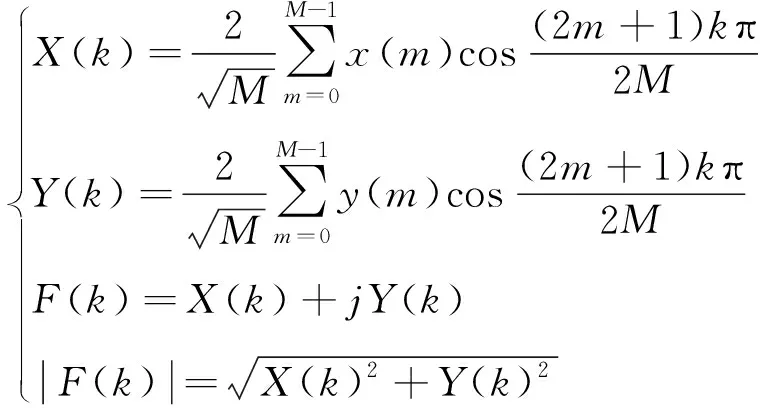
(6)
通过式(6)的计算,得到离散余弦变换子系数如式(7)所示。
C(k)=|F(k)|/F(1)
(7)
离散余弦变换系数对目标具有平移、旋转及比例不变性,对轮廓数据的起始点不敏感。
2.1.2独立的不变矩参数
如果一幅数字图像满足分段连续,且在XY平面上只有有限个零点,则说明该数字图像的各阶矩是存在的。
对于二值图像,由于其中像素的值只有0和1,假设目标区域像素值为1,背景区域像素值为0,则该二值图像的r+s阶矩如式(8)所示:
(8)
该区域的中心矩为:
(9)

2.1.3区域描述特征参数
为了更好地识别出车辆目标,选取5个典型区域特征作为目标识别的特征参数,分别为:区域的偏心率(即与区域有着相同二阶矩的椭圆的偏心率);区域的短轴和长轴之比;区域的面积;区域的周长;区域的面积与周长平方之比。
2.2 车辆识别的RBF神经网络设计
构建了自组织选取中心的RBF三层神经网络,具有19维输入神经元和2个输出量。其中,输入层完成特征向量的输入。中间层为隐层,它与输入层完全连接(权值=1)。输出层计算中间层与输出层之间的权值,得到2个输出量,识别出车辆目标与非车辆目标。
自组织选取中心的RBF神经网络算法首先完成无导师学习,求解出中间层的基函数;然后进行有导师学习,求解中间层至输出层之间的权值。
径向基函数取高斯函数,如式(10)所示。
(10)
式中:‖xp-ci‖为欧式范数;ci为高斯函数的中心;σ为高斯函数的方差。
网络的输出量如式(11)所示。
(11)

设e是样本的期望输出值,则基函数的方差可表示为:
(12)
自组织选取中心的RBF神经网络学习法的总体步骤如下:
步骤1采用K-均值聚类法得到基函数中心c。
步骤2求解基函数的方差σi。
选取高斯函数作为网络的基函数,其方差的计算公式如下:
(13)
式中:cmax是基函数中心之间的最大距离。
步骤3中间层与输出层节点间的权重系数计算。
权重系数的计算可以用最小二乘法得到,如式(14)所示:
(14)
3 车辆检测与识别结果
3.1 车辆存在的感兴趣区域检测结果
图2为基于尾灯对特征提取的车辆区域结果。从图中可以看出,从原始图像中提取了车辆的尾灯区域,结合尾灯质心位置确定了车辆宽度区域,最后得到车辆的矩形标记框。
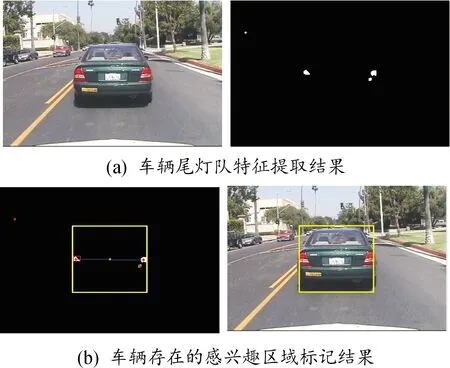
图2 基于尾灯对特征提取的车辆存在的感兴趣区域结果
此外,共验证了200张采集的图像(含晴天、阴天、雨、雪及夜间条件下的图像),能够准确提取车辆标记区,其检测精度可达97%。下面给出了雨、雪天及夜间非常规环境下的检测结果,如图3~5所示。从图3~5的检测结果可以看出,基于车辆尾灯对特征针对雨雪及夜间环境同样能够准确提取出车辆存在的感兴趣区域并对其进行标记。
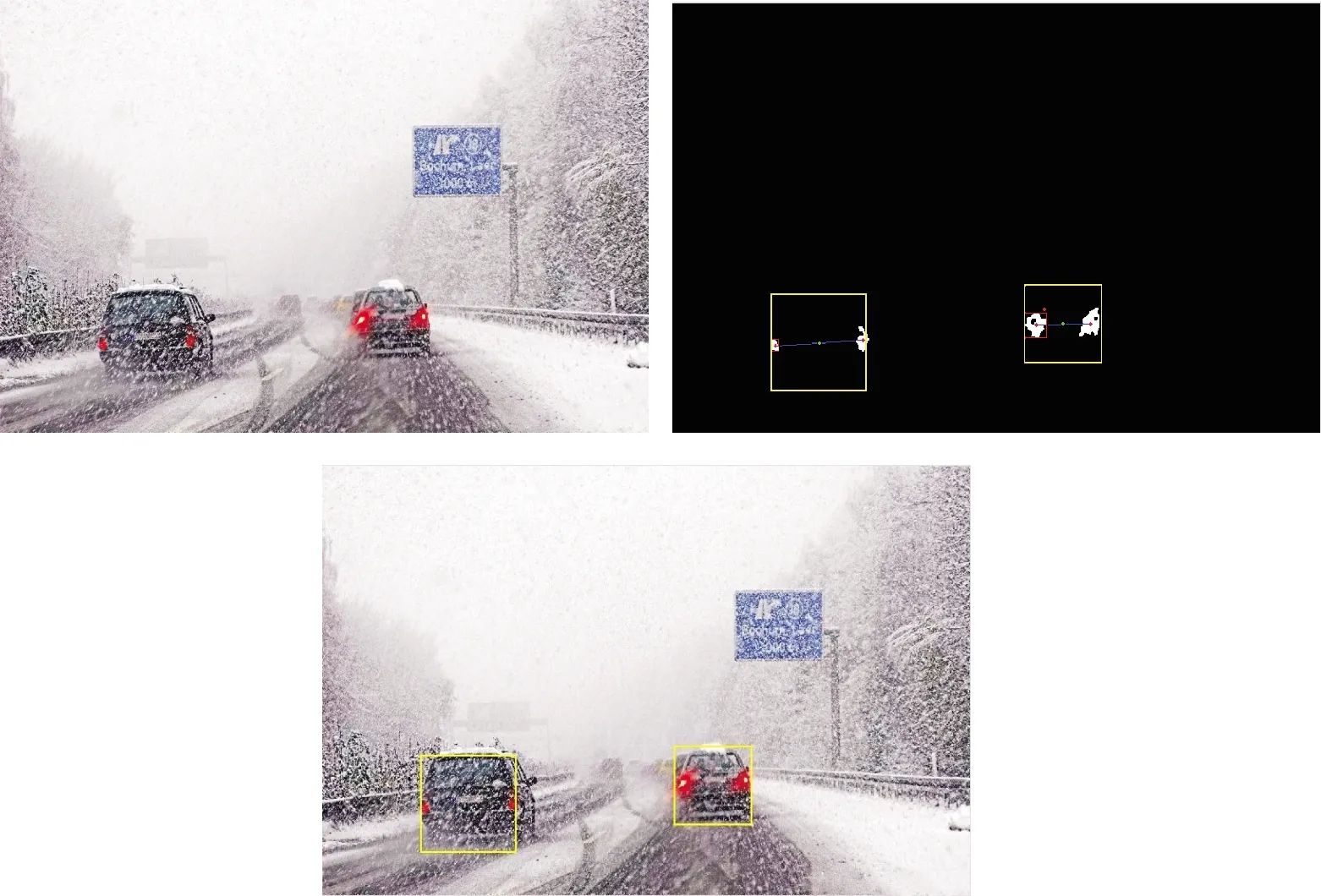
图3 雪天环境下车辆存在的感兴趣区域标记结果

图4 雨天环境下车辆存在的感兴趣区域标记结果

图5 夜间环境下车辆存在的感兴趣区域标记结果
图6为利用尾灯对特征提取的并行两车辆的的检测结果,从图6右侧图中可以看出,当两车尾灯形状形似且高度相等时,采用该方法确定的车辆存在感兴趣区域会存在混淆的现象。针对该情形,需要对混淆区域进行进一步确认,才能保证车辆识别的准确性。

图6 并行车辆存在的感兴趣区域标记结果
3.2 感兴趣区域车辆识别结果
如前所述,当遇到两车尾灯形状形似且高度相等时,利用尾灯特征检测车辆的方法可能会存在目标误检现象。如图6所示情况发生时,对于标记出来的候选框区域,需要进一步确认3个候选区内是否都真正含有车辆,一旦此情形发生时,就需要采用论文提出的RBF神经网络进行深层次确认,才能保证车辆识别的可靠性,避免误检现象的发生。
在利用RBF神经网络对车辆目标识别时,首先要利用样本对网络进行训练和学习,直到网络收敛为止,然后利用训练过的网络对测试样本进行识别,具体步骤如下:
步骤1首先将样本图像进行尺寸标准化转换,统一为250×219像素。
步骤2对样本图像进行边缘检测与分割,得到车辆目标区域。
步骤3针对目标区域进行前文所列19个特征参数提取,获取车辆特有特征值。
步骤4编程实现样本训练直至网络收敛,即达到训练精度要求。
步骤5随机选取测试图像,完成步骤1、2,用训练好的网络对测试图像进行识别验证。
对于图6情形,针对标记框区域,截取该图像区域作为测试图像,按照上述步骤便可以实现图像区域内车辆存在性的确认。
建立了1 700张车辆正、负样本,对RBF神经网络进行了训练,随机选取60%的正、负样本完成了测试,同时也针对停车场及并行车辆等情形进行了确认测试,实现了检测区域内车辆存在性的准确确认,正确率≥94%。通过RBF神经网络的训练误差性能曲线(图7)可以看出,本文设计的网络达到了训练目标精度要求。
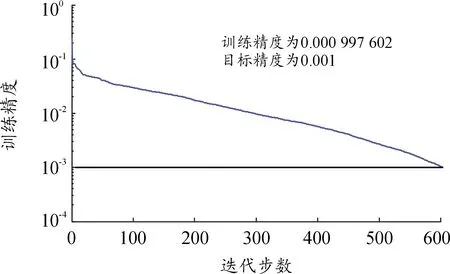
图7 RBF神经网络训练误差性能曲线
4 结论
结合车辆尾灯对特征,确定车辆可能存在的感兴趣区域,分别针对不同环境条件(如晴天、雪天及夜间等)下车辆可能存在的感兴趣区域进行了标记验证。实现了车辆的边缘与区域特征参数提取,建立了车辆正、负样本库,完成了RBF神经网络识别器的训练并达到了误差精度要求,实现了基于尾灯特征提取的车辆存在区域内车辆的进一步确认,提高了车辆检测的可靠性。
猜你喜欢
金山(2022年2期)2022-03-15
汽车零部件(2021年9期)2021-09-29
含能材料(2021年1期)2021-01-10
模具制造(2019年10期)2020-01-06
电子制作(2019年19期)2019-11-23
工业设计(2016年8期)2016-04-16
重型机械(2016年1期)2016-03-01
汽车实用技术(2015年8期)2015-12-26
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27