
基于改进模糊逻辑控制的并联式船舶动力系统能量管理
2021-11-05 03:08王瑞昌陈志华明新国
上海交通大学学报 2021年10期
王瑞昌, 陈志华, 明新国
(上海交通大学 机械与动力工程学院,上海 200240)
由于环境污染的日渐严重和排放法规的日益严苛,混合动力船舶开始逐渐受到关注[1-2].混合动力船舶主要是指由两个或多个能同时运转的单个驱动系统联合组成的船舶.相较于传统的以柴油机为主的单一推进方式,由混合动力系统进行推进可以显著提高船舶轻载过程中的燃油效率,降低排放中的污染物含量,从而满足经济和环境保护的要求.随着工业技术的快速发展,船舶电力来源也愈加多样化,主要包括柴油机发电、太阳能发电、锂电池、超级电容及燃料电池等[3].
现代意义上的混合动力船舶主要包括串联式混合动力船舶、并联式混合动力船舶及混联式混合动力船舶.混合动力系统不再单独由发动机提供船舶航行所需总功率,而是通过采用机电耦合架构,大大提升了船舶动力系统的灵活性、安全性、可操作性及环保性,但是也给混合动力船舶的能量管理带来了挑战.因此,如何优化船舶混合动力系统的能量管理策略就显得尤为重要.文献[4]通过对燃料电池混合动力系统的能量管理策略进行设计与研究,利用燃料电池的优化控制策略提高了燃料电池的耐久性,实现了系统功率的合理分配.目前混合动力系统的能量管理策略主要分为两类:一类是基于规则的控制策略,即依靠预先制定的规则,通过判断船舶航行工况决定混合动力系统的工作模式;另外一类是基于优化的控制策略[5],即通过设定不同的优化目标,确定不同的能量管理策略.
基于规则的控制策略可根据规则是否具有确定性分为基于确定规则的策略和基于模糊规则的策略.文献[6]通过构建由内燃机、发电机及锂电池组成的能量系统模型,根据船舶作业的实际工况制定功率变化规律,提出了船舶的基础能量控制策略和高级能量控制策略.文献[7]采用模糊逻辑控制(Fuzzy Logic Control, FLC),以电池荷电状态(State of Charge,SOC)值和电池端电压为输入,电池工作状态(Battery Working State, BWS)为输出,根据BWS来选择不同的工作模式,并采用仿真对该能量管理策略进行分析验证.结果表明该方法可以使得发动机保持在燃油利用效率较高区域工作,减少污染排放.文献[8-9]将电池与超级电容结合,组成能量存储系统,并研究了将这一混合能量存储系统安装在串联式混合动力船舶的工作效果.文献[10]采用模糊逻辑控制研究了由燃料电池、蓄电池以及超级电容共同组成的推进动力来源的混合动力系统能量管理策略,并验证了提出的混合动力系统能量分配准则的合理性.基于优化的混合动力系统能量控制策略主要分为全局优化策略和实时优化策略.全局优化策略是根据历史工况数据,在线下进行算法优化,找到最优的能量管理控制策略.常用的基于全局优化的能量管理策略主要包括模拟退火法、博弈论、线性规划、最优化控制、动态和随机规划以及遗传算法等.实时优化策略由于可以实现实时动态预测船舶的航行工况,得到了较为广泛的应用.文献[11]研究了一种基于模型预测控制的混合动力系统能量管理策略,从而实现了船舶动力系统中各个动力源输出载荷之间的协调控制.文献[12]利用模型预测控制算法对船舶航行所需的功率进行预测,进而对船舶动力系统不同的动力能源需提供的功率大小进行分配,提升了船舶动力系统的燃油效率和电力系统的稳定性.
目前,串联式船舶动力系统可以通过控制电力总线上电流的流动方向,能快速、灵活地对船舶动力系统的能量分配进行控制,因此,国内外学者已经开展了很多针对串联式混合动力系统的能量管理策略.串联式混合动力系统多是在总功率相对较小的船舶上进行设计应用,相比于串联式混合动力系统,并联式混合动力系统既可以在船舶设计制造阶段进行应用,也可以通过将现有的传统的船舶动力系统改装得到.因此,船舶并联式混合动力系统的应用可以大大降低投资,起到立竿见影的效果.但是,并联式混合动力系统多用于大功率和大吨位的船舶,针对并联式混合动力系统的能量管理策略研究较少,多是基于确定规则和模糊规则的能量管理策略,输出总功率对于需求功率的跟随效果较差.因此,本文主要针对并联式混合动力系统的能量管理策略开展研究.
1 并联式船舶动力系统
1.1 并联式船舶动力系统组成概述
船舶动力系统是一个大型的成套设备,主要包括发动机、传动装置及推进装置.发动机是船舶航行的主要动力来源,是船舶动力的输出设备,主要是将热能转化为机械能,推动船舶运动.并联式混合动力系统是通过耦合装置,使用机械连接将发动机与螺旋桨直接连接起来,这就使得发动机产生的功率可以直接驱动螺旋桨转动,降低能量在传输过程中的损失.并联式船舶动力系统结构如图1所示,发动机和电动机可以根据船舶航行的不同工况, 为船舶提供驱动力.
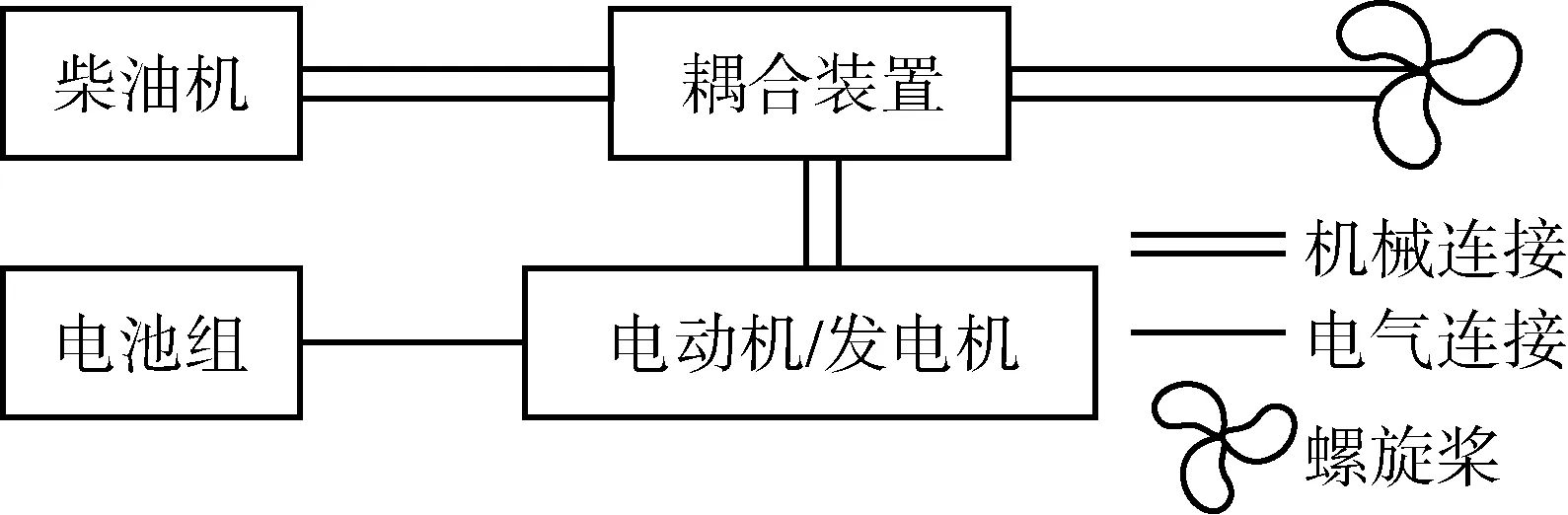
图1 并联式船舶动力系统结构Fig.1 Structure of parallel ship power system
1.2 并联式船舶动力系统工作模式
根据不同的航行工况,并联式船舶动力系统的工作模式可以分为以下4种.
(1) 发动机与电池同时为船舶提供动力,此时船舶动力系统提供的推进功率最高;
(2) 由发动机单独为船舶提供动力;
(3) 发动机在为船舶航行提供动力的同时, 也提供部分功率给以电池或超级电容为主的储能单元,为储能单元充电;
(4) 在船舶低负载航行时,由以电池或者超级电容为主要储能单元的储能模块放电,单独为船舶航行提供动力.并联式船舶动力系统在不同工作模式下运行时的能量流动方向如图2所示.
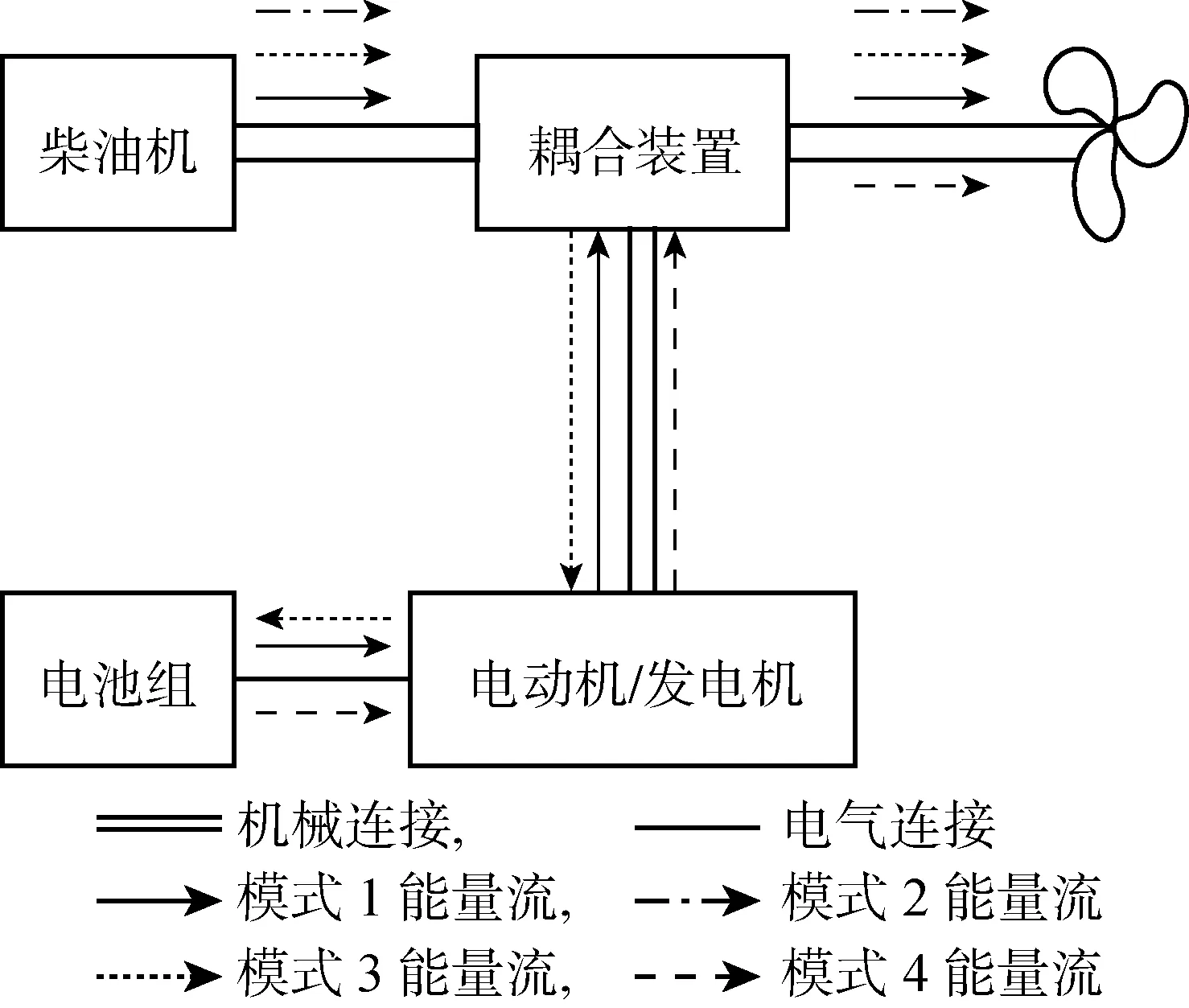
图2 并联式船舶动力系统不同工作模式的能量流动Fig.2 Energy flow at different operating modes of parallel ship power system
并联式船舶动力系统多用于大中型船舶,需求功率一般较大,且耦合装置为机械连接,采用智能控制算法频繁地更换船舶动力系统的工作模式会对耦合装置造成较为严重的磨损,而现有的基于经验的和基于确定规则的能量管理策略不能满足船舶动力系统航行过程中的实际功率需求.因此,本文采用改进的模糊逻辑控制对并联式船舶动力系统的能量管理策略进行研究.
2 改进的模糊逻辑控制算法
2.1 算法设计
船舶在航行的过程中,除了需要满足其在静水中航行的需求功率之外,还需要考虑船舶在航行过程中受到的环境扰动.文献[13]利用自适应模糊控制实现了船舶动力定位,即利用控制系统驱动推进器抵消风、浪等作用于船舶上的环境扰动.而船舶在航行过程中的实际需求功率则可以通过将船舶循环航行过程中一个周期内的需求功率与环境扰动相叠加得到:
Pd=Pcla+Pr
其中:Pd为模糊逻辑控制中实际的需求功率;Pcla为静水状态下的典型需求功率;Pr为环境扰动带来的额外的需求功率.
根据模糊逻辑规则输出的总功率不能较为精确地满足需求功率大小,改进的模糊逻辑控制算法是在模糊逻辑控制的基础上将输出总功率与需求功率的差值乘以一个修正因子作为修正项,与需求功率相叠加,作为修正的需求功率,进而可以激活不同的模糊逻辑控制规则,减小输出总功率与实际需求功率的差值.此时的需求功率修正为
Perror=Pd-Pout
其中:w为修正系数,可以通过调整修正系数的大小达到调整修正项大小的效果;Perror为需求功率与修正前实际输出总功率的差值,即需求功率的修正项;Pout为输出总功率.
2.2 模糊逻辑控制器设定
并联式船舶动力系统通过耦合装置中的机械连接将发动机、电池组及螺旋桨联结在一起,频繁地更换动力系统的工作模式将会大大降低船舶动力系统的整体寿命.因此本文在不对船舶动力系统运行寿命产生较大影响的前提下,通过调用MATLAB软件中的Fuzzy工具箱,利用基于改进模糊逻辑控制的管理策略对船舶动力系统的工作模式进行实时切换,进而提升并联式船舶动力系统的能量利用效率和系统稳定性,如图3所示.图中:Pe-out为柴油机提供的推进功率;Pe-bat为柴油机提供给电池组的充电功率;Pbat为电池组的推进功率.
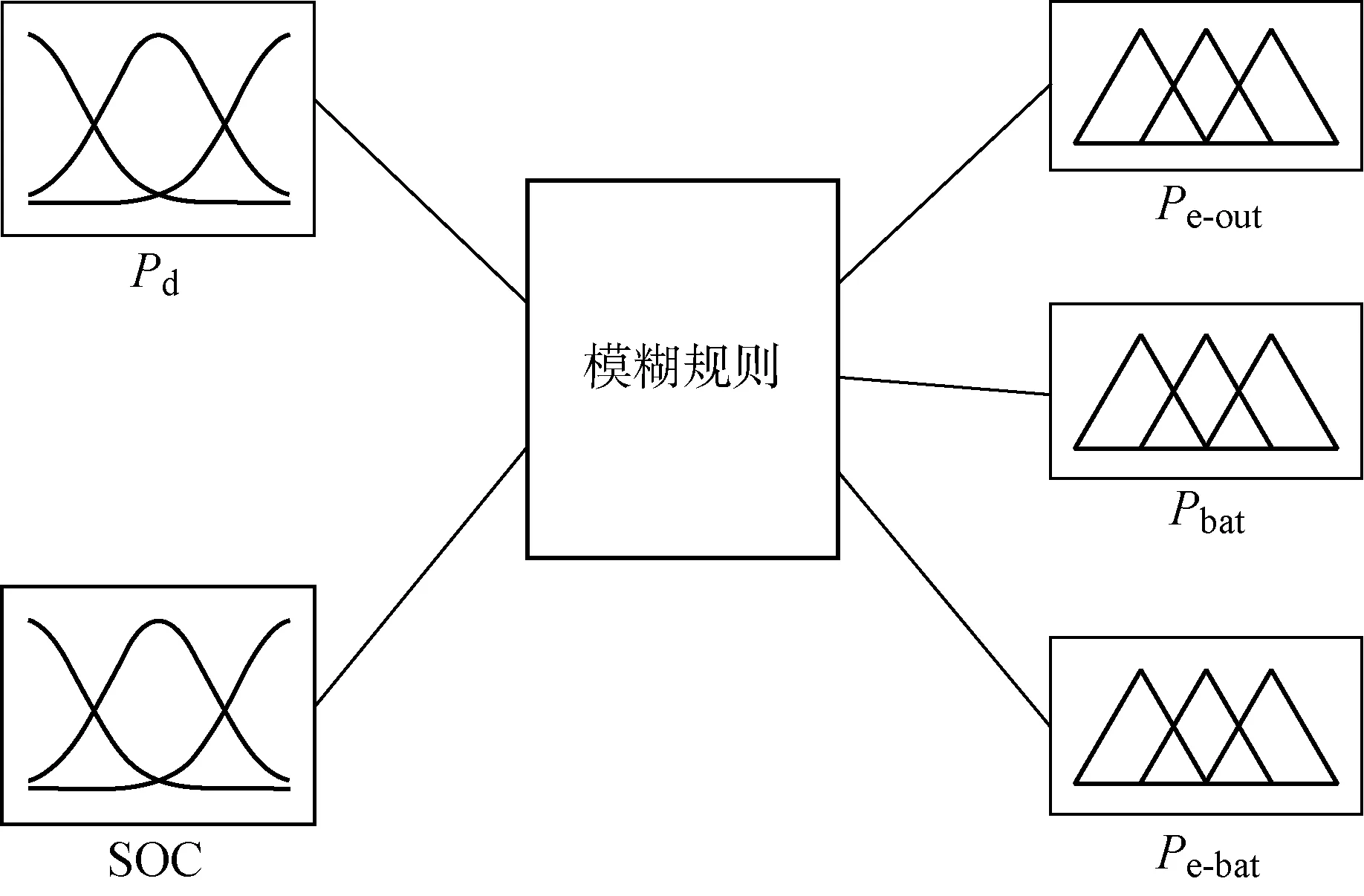
图3 MATLAB软件中的Fuzzy工具箱Fig.3 Fuzzy toolbox in MATLAB software
2.2.1输入及输出设定 MATLAB软件中的Fuzzy工具箱主要是通过设定输入、输出的隶属度函数及模糊规则,进而实现模糊逻辑控制.基于模糊逻辑控制的并联式船舶动力系统能量管理策略的输入主要包括船舶所需的总功率和电池组剩余的荷电状态值两个状态量.设定船舶所需的总功率及电池组剩余的荷电状态有7个隶属度集合,分别为VS(非常小)、S(小)、RS(较小)、M(中等)、RB(较大)、B(大)以及VB(非常大).船舶所需的总功率和电池组剩余的荷电状态的隶属度函数如图4(a)、4(b)所示,图中P为概率.基于模糊逻辑控制的并联式船舶动力系统能量管理策略的输出是对船舶需求的总功率进行分配,即柴油机输出功率和电池组输出功率.设定柴油机推进时输出功率有9个隶属度集合,分别为VS(非常小)、S(小)、RS(较小)、LS(偏小)、M(中等)、LB(偏大)、RB(较大)、B(大)以及VB(非常大);电池组应输出功率有3个隶属度集合,分别为S(小)、M(中等)以及B(大);柴油机充电时向电池输出功率有3个隶属度集合,分别为S(小)、M(中等)以及B(大).其隶属度函数如图4(c)~ 4(e)所示.
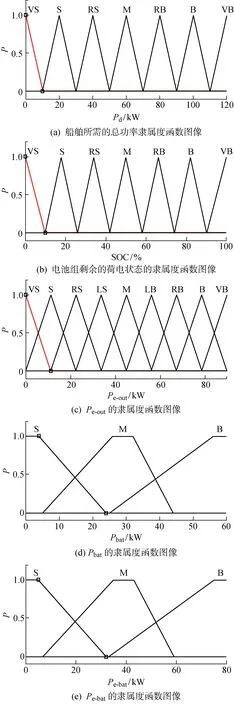
图4 隶属度函数配置Fig.4 Configuration of membership functions
2.2.2模糊规则设定 根据船舶动力系统的模糊逻辑控制原理,设定了如表1~3所示的柴油机推进时输出功率、电池组应输出功率和柴油机充电时向电池输出功率的模糊逻辑控制规则.例如,当需求功率为VS,即小功率需求(0~10)kW,电池组剩余荷电状态为VS(0~0.2)kW, 此时发动机应分配的功率为VB(80~90)kW,因为此时柴油机的输出功率一部分用来提供船舶航行所需的功率,另一部分用来给电池组充电.

表1 Pe-out控制规则Tab.1 Control rules of Pe-out
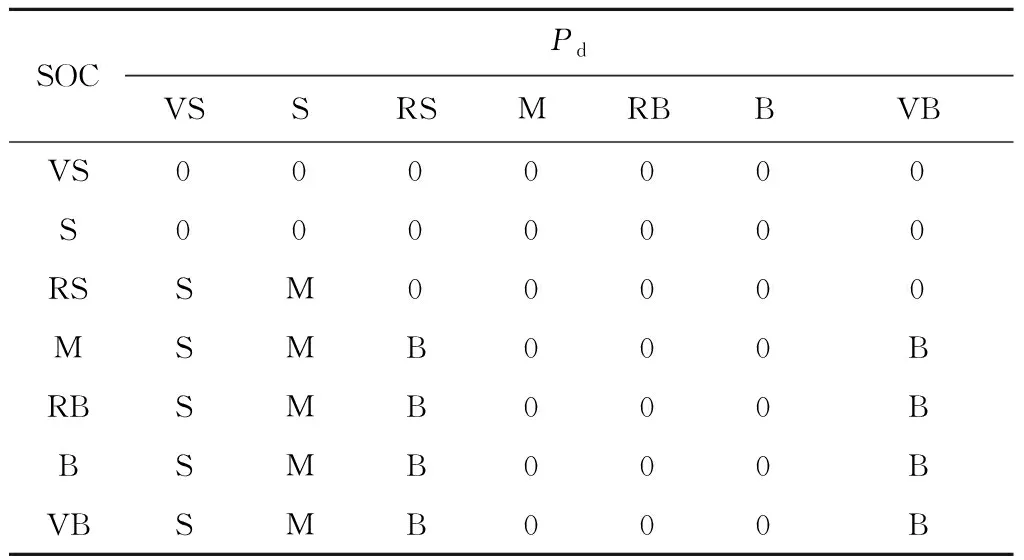
表2 Pbat的控制规则Tab.2 Control rules of Pbat
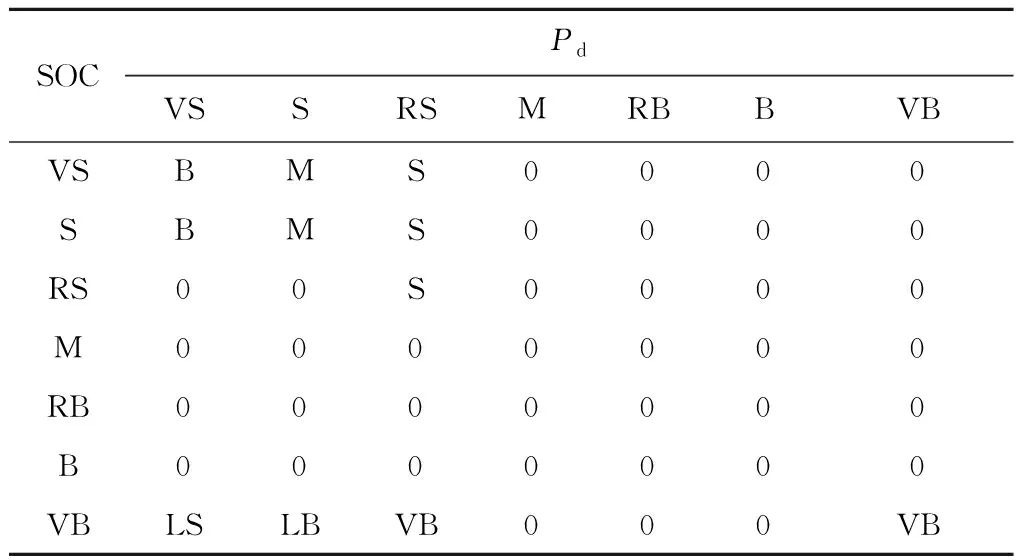
表3 Pe-bat的控制规则Tab.3 Control rules of Pe-bat
3 示例验证
3.1 船舶动力系统的基本情况
以某新型内河拖轮的典型工况作为研究对象,该船舶的典型工况主要包括停靠港口、离港、加速航行及正常巡航等经典工况.船舶航行过程中的实际需求功率如图5所示,图中:t为时间.
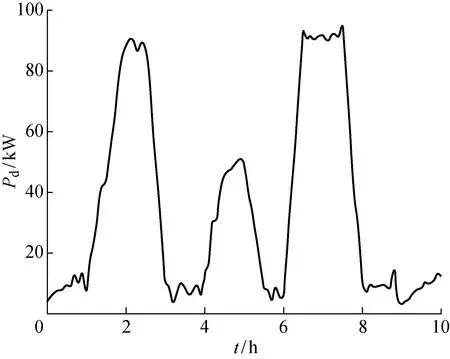
图5 船舶航行过程中的需求功率Fig.5 Demand power during ship sailing
3.2 Simulink仿真结果分析
根据模糊逻辑控制原理,建立并联式船舶动力系统的Simulink仿真模型,如图6所示,图中2、2.5等数字为修正系数.Signal 1用于模拟船舶航行过程中为克服环境扰动所需提供的功率波形;Signal 2用于模拟静水条件下船舶航行所需的功率需求波形;Signal 3和Signal 4 相叠加用于模拟电池组的荷电状态变化曲线;Signal 5用于修正Signal 3和Signal 4叠加后的电池组荷电状态曲线,将其修正为纵坐标在0~1之间的变化曲线.由柴油机输出功率和电池组输出功率共同组成的输出总功率与需求功率的关系如图7所示.修正前的柴油机输出功率和电池组输出功率曲线分别如图8(a)和图8(b)所示,经过模糊逻辑控制,可以对船舶航行的需求功率进行分配,即规定柴油机输出功率和电池组输出功率的大小.柴油机输出功率可以通过调节燃油消耗实现,电池组输出功率可以通过调节输出电流电压实现.
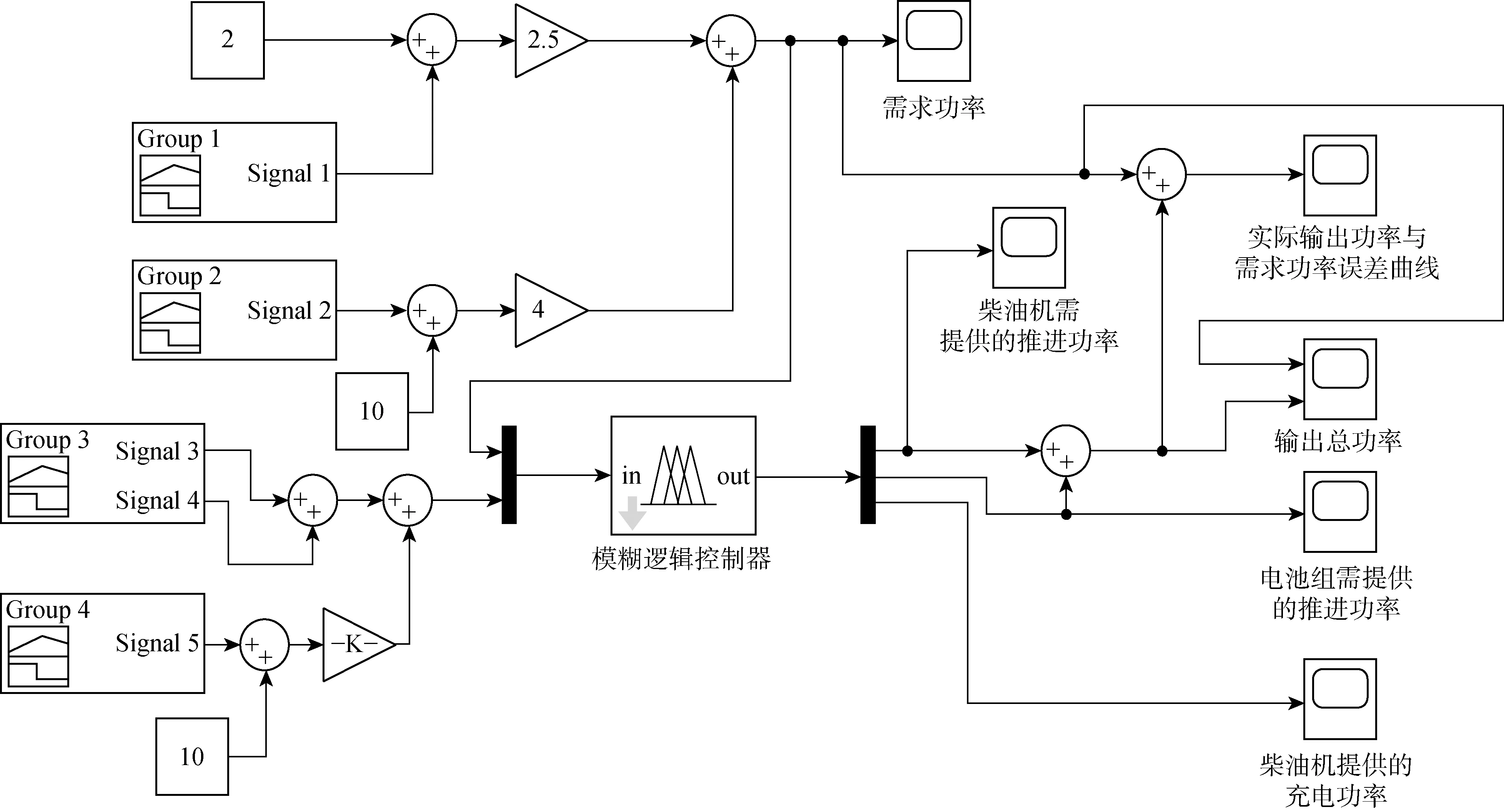
图6 并联式船舶动力系统的Simulink仿真模型Fig.6 Simulink simulation model of parallel ship power system
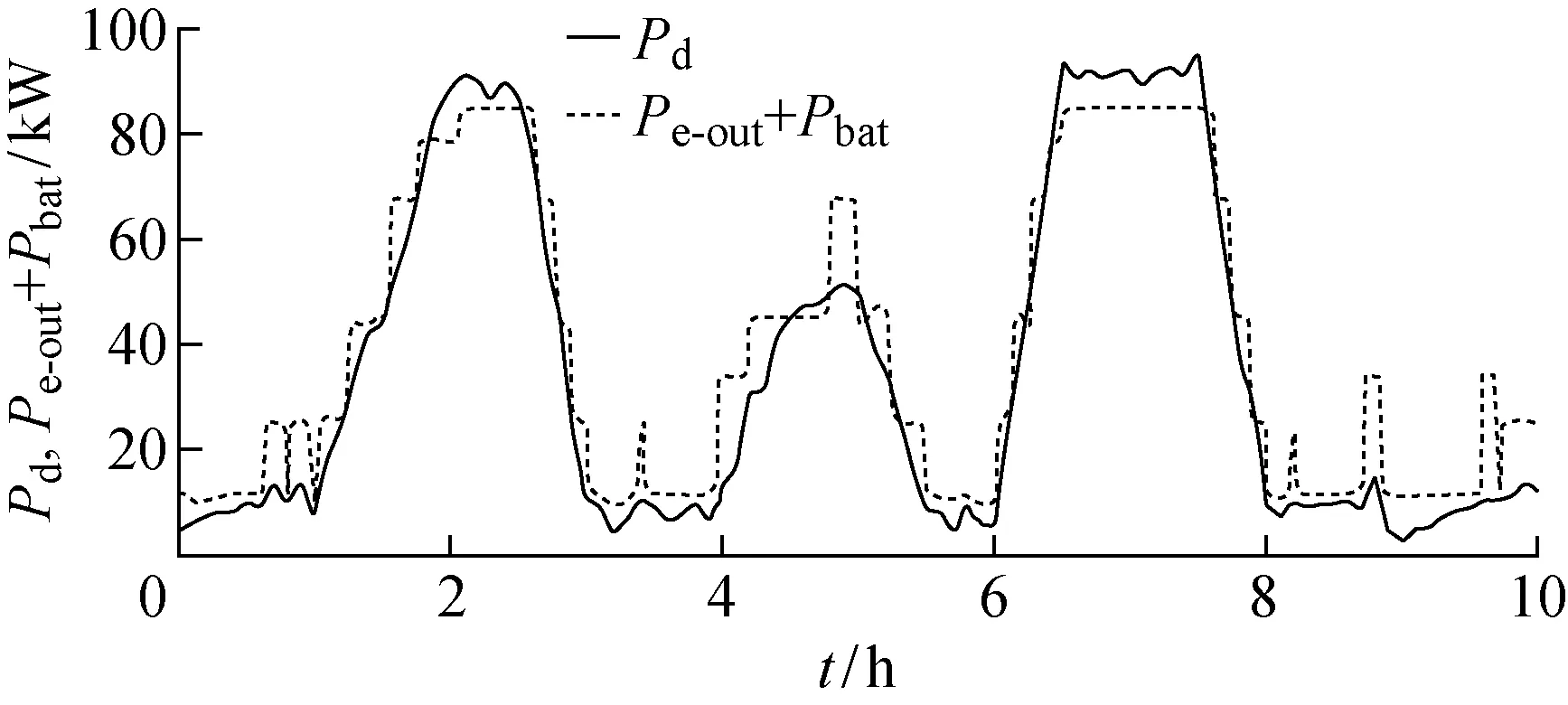
图7 需求功率与修正前输出总功率对比Fig.7 Comparison of required power and unmodified output power
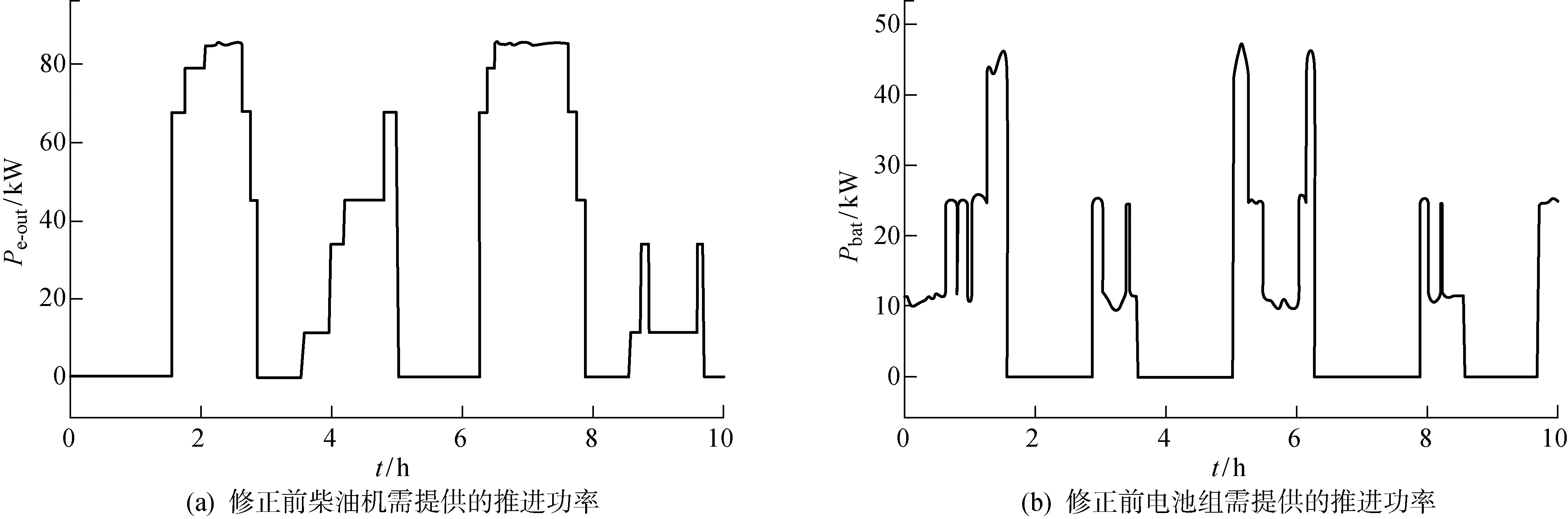
图8 修正前的柴油机输出功率和电池组输出功率Fig.8 Unmodified propulsion power required for diesel and battery package


图9 修正后的模糊逻辑仿真图Fig.9 Modified simulation model of fuzzy logic control

图10 需求功率与修正后输出总功率对比图Fig.10 Modified comparison chart of required power and output power

图11 修正后柴油机需提供的推进功率和电池组需提供的推进功率Fig.11 Modified propulsion power required for diesel engine and battery package
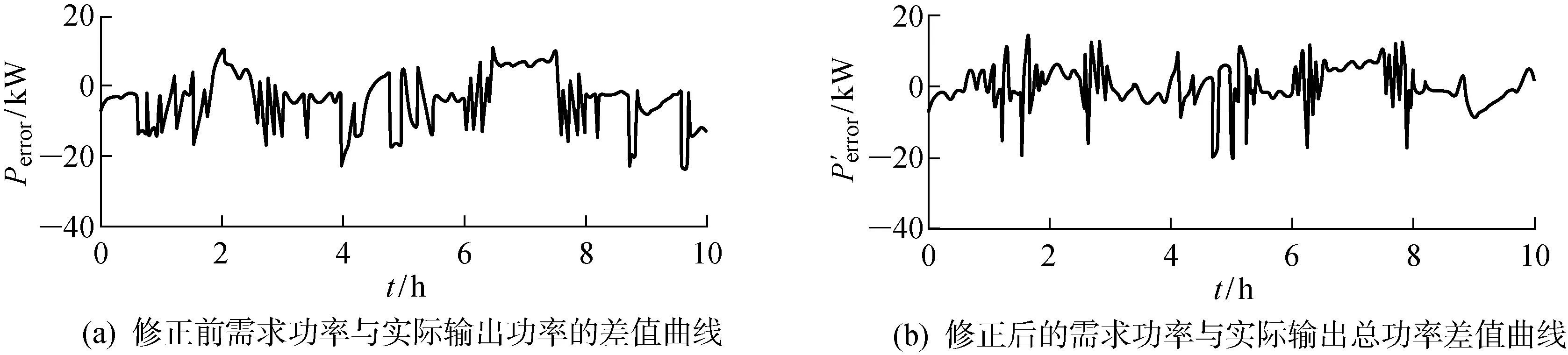
图12 修正前后的需求功率与实际输出总功率差值曲线Fig.12 Unmodified and modified error curves of demand power and actual output power
修正前后输出总功率与需求功率误差绝对值的差值曲线如图13所示.用δ来表示修正后的误差大小:

图13 修正前后输出总功率与需求功率误差绝对值的差值曲线Fig.13 Error curve of absolute error between required power and output power before and after modification
δ=
如果δ<0,则表明修正后的误差更小.观察可知,修正后系统误差更小,修正效果较好.
3.3 算法稳健性分析
(1) 不同模糊逻辑控制规则下,修正前后输出总功率与需求功率的误差分析.
通过选用3种不同的模糊逻辑控制规则,均将输出总功率与需求功率的差值作为修正项,对需求功率进行修正,所得的修正前后输出总功率与需求功率误差绝对值的差值如图14(a)~14(c)所示.可见,该算法可以有效降低输出总功率与需求功率的差值.

图14 3种模糊逻辑控制规则下修正前后输出总功率与需求功率误差绝对值的差值Fig.14 Error of absolute error between required power and output power before and after modification under three different fuzzy logic control rules
(2) 不同模糊逻辑控制规则间的输出总功率与需求功率误差比较.
分别比较3种不同模糊逻辑控制规则下修正后输出总功率与需求功率误差绝对值的差值,如图15和16所示.可知,相比于其他两种模糊逻辑控制规则,本文中提出的模糊逻辑控制规则较好.
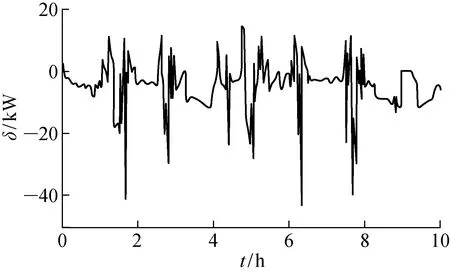
图15 第1种与第2种模糊逻辑控制规则的差值Fig.15 Error of the first and the second fuzzy logic control rules
综上所述,本文提出的改进的模糊逻辑控制算法具有较好的稳健性.
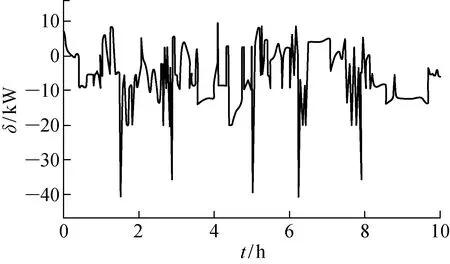
图16 第1种与第3种模糊逻辑控制规则的差值Fig.16 Error of the first and the third fuzzy logic control rules
4 结语
以柴油机为主要推进装置的并联式混合动力系统为例,针对船舶不同的航行工况,通过改进模糊逻辑控制,以需求功率与实际输出总功率的差值作为需求功率的修正项,对需求功率输入端激发的模糊规则进行更改,可以简便快捷地实现对并联式船舶动力系统能量管理进行决策,为大功率船舶动力系统的能量管理提供了新的解决方案.
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
北京理工大学学报(2022年6期)2022-06-14
太阳能(2022年2期)2022-03-07
快乐语文(2021年35期)2022-01-18
汽车维修与保养(2020年11期)2020-06-09
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
科技视界(2016年18期)2016-11-03
旅游纵览(2015年8期)2015-09-25
