新能源汽车电子转向自动控制系统设计研究
2021-11-03 09:23青岛中测检测技术服务有限公司王金涛
电子世界 2021年18期
青岛中测检测技术服务有限公司 王金涛
在现代科技不断发展的背景下,新能源汽车能够使石化能源的危机得到缓解,而且在绿色与环保方面拥有突出优势,不过其控制系统仍有很多要完善的地方,待控制系统功能充分发挥后,新能源汽车的能源利用率和实用性都会大幅提升,本文基于此,研究了新能源汽车电子转向的自动控制系统的设计。
1 对新能源汽车的电子转向自动控制系统的电流和转矩传感器的设计
对新能源汽车的电子转向自动控制系统而言,其硬件系统是由电流传感器以及转矩传感器构成的。电流传感器这一反馈信号装置非常重要,其主要功能是检测电动机电流的大小。电流传感器的产生是在LabCar的ES1292板卡之中模拟而成,转矩传感器的信号是在LabCar的PB4350板卡之中模拟而成。对电流传感器的设计以及转矩传感器的设计来说,传感器设计中的上位机需要完成数据处理工作,而下位机则是助力转向系统。利用PC机串口来完成对数据的传输工作,进而能够测试传感器的信息、测试方向盘转矩。传感器设计的示意图如图1所示。

图1 传感器设计
2 新能源汽车的电子转向自动控制系统的软件设计
2.1 新能源汽车的转向自动控制电路的模块设计
新能源汽车的电子转向自动控制系统的优化主要指的是电路模糊测试模块,在明确系统的目标电流之后,整合整体的电流,使汽车运行时的目标电流无论是稳定性还是响应性均得到改善。电路模糊测试模块的优势除了有耗电很少以及性价比很高之外,还有操作流程相对比较简单,可以有效符合新能源汽车的自动转向控制系统的实际需要。需要依据具体需求对进步电机型号进行选择,常见的进步电机型号以及主要的参数如下文所示:F-5718HB5401,步距角角度为1.8°,相电阻为1.4Ω,相电感为5mH,额定电流为4.4A,其最大静转矩为3.1N·m,重量为1.46kg;F-5718HB4402,步距角角度为1.8°,相电阻为0.81Ω,相电感为3mH,额定电流为2.2A,其最大静转矩为2.8N·m,重量为1.14kg;F-5718HB4401,步距角角度为1.8°,相电阻为3.1Ω,相电感为11.8mH,额定电流为4.4A,其最大静转矩为2.8N·m,重量为1.14kg;F-5718HB3401,步距角角度为1.8°,相电阻为0.95Ω,相电感为3.7mh,额定电流为3.1A,其最大静转矩为2.2N·m,重量为1.04kg。电路模糊测试模块如图2所示。

图2 电路模糊测试模块
2.2 新能源汽车的同步带的传动设计
在设计新能源汽车的同步带转动时,已经确定传动比i是2,电机的最大输出静转矩是2.8N·m,最大的转向负载力矩是2.3N·m,主动转速n1是300r/min,同步带的中心距a是300m。在此情况下,同步带功率的计算方式为:

公式中,Pd指的是同步带的功率,K指的是载荷修正系数,Pm指的是进步电机功率。
在对同步带轮的直径进行确定之后,应该确定传动带的节距与同步带轮的齿数,齿数直径的计算方式为:

其中Pd指的是同步带的节距,Z指的是同步轮齿。
2.3 对新能源汽车的转向控制模块进行设计
对转向控制模块的设计来说,极端比例控制的公式为:
公式中,u(t)指的是控制器所输出的控制量,kp指的是比例系数,u0指的是时控制器所输出的控制量。按照比例+积分控制来计算整体的控制规律。
3 实验分析
出于对新能源汽车的电子转向自动控制系统的优化效果进行验证的目的,本文设计了一个对比实验,对比实验的内容如下文所示:把同种型号的新能源电动车的转向自动控制的助力特性当作实验对象,把未经优化的新能源汽车的电子转向自动控制系统当作对比实验中的对照组,把经过优化的新能源汽车的电子转向自动控制系统当作对比实验中的实验组,对比这两组系统的测验结果。
出于尽最大程度保障实验公平的目的,实验中的实验组和对照组的各个参数需要保证一致。为使新能源汽车的电子转向自动控制系统在优化前与优化后的区别得到充分体现,实验组应该依据新能源汽车的电子转向自动控制系统的优化方式来操作,而对照组需要依然使用传统的方法进行操作。对对比实验的验证环节来说,相关工作人员应该重点测试电动机所输出的转矩跟随方向盘的力矩变化规律与行驶车速的变化规律,测试的结果需要使用助力特性曲线来表现。
在对比这两组系统的过程中,应该着重对自动行驶的车速和方向盘的力矩变化规律进行比对。二者在EPS转向能力方面的具体情况主要是通过助力特性曲线进行展现的。在测试时,如果两组控制系统中的行驶车速发生变化,那么汽车轮胎的作用力点也会出现变化,在高速行驶的情况下,其控制力矩会比较小,在高速行驶的情况下,转向力矩会比较大。在实际测试时,两组系统的车速变动均会导致转向力矩发生变化。实验组的系统助力效果与对照组的系统助力效果如图3所示。
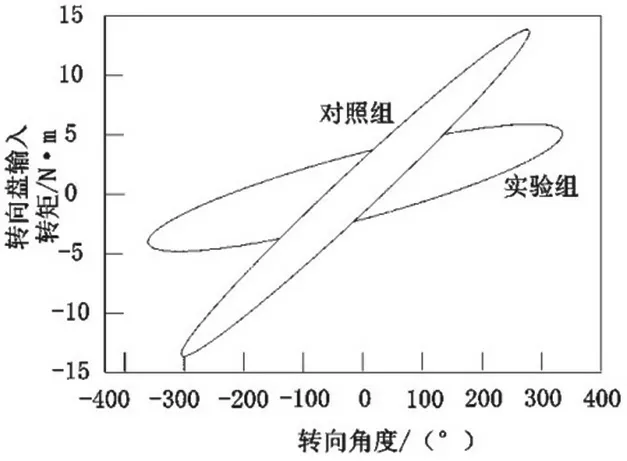
图3 阻力特性对比
在对两组系统的阻力特性进行对比之后,能够发现转向系统在优化之后的转向灵敏程度比较高,而且会更轻便,在相同转向角度的背景下,优化之后的系统的转向需求会变小,在提供助力相同的背景下,助力力矩会伴随车速及力矩的改变而出现变化。汽车的助力力矩会在原地转向助力的阶段达到最大,从而能够为汽车控制的轻便性提供保障。按照EPS在多个环境中的变化规律,对具体测试而言,伴随车速的提高,电动机的助力特性将会不断变小。由此可知,新能源汽车的电子转向自动控制系统在优化之后能够具有更加出色的助力特性,可以使新能源汽车的电子转向自动控制系统在自动控制方面的精准程度得到大幅提升。
结束语:总而言之,电子转向自动控制系统的性能会对新能源汽车的动力效率与汽车在运行时的安全性产生直接影响,所以,相关人员需要对新能源汽车的电子转向自动控制系统设计进行研究,不断完善电子转向自动控制系统的设计内容,这样做能够为研究工作的顺利进行提供便利。相信在经济不断发展与科技不断进步的时代背景下,新能源汽车在未来的应用范围将会逐渐扩大,其安全性能也会不断提升。
猜你喜欢
粮食加工(2022年6期)2022-12-02
长春大学学报(2021年4期)2021-05-17
四川冶金(2018年1期)2018-09-25
制造技术与机床(2017年3期)2017-06-23
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年1期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
电机与控制应用(2015年3期)2015-03-01