基于马尔可夫过程的水电工程门塔机群防碰撞预警分析技术
2021-11-02 11:55李永山刘发永李桂英周新志
四川水利 2021年5期
李永山,刘发永,梁 勇,李桂英,周新志
(1.中国水利水电第五工程局有限公司,成都,610066;
2.四川大学电子信息学院,成都,610065)
1 引言
门座起重机(门机)和塔式起重机(塔机)是水电开发工程中的重要施工设备,主要用于物料运输。但是,在建设施工过程中,狭窄的作业空间内往往布置较多的门塔机运输设备,设备间交叉作业率高,容易造成运输设备之间碰撞。因此,预防设备间的碰撞已成为水电工程施工中亟待解决的问题。
随着数字传感技术、嵌入式处理技术、远程监控技术等电子信息技术的发展,数字化、智能化的门塔机群防碰撞系统已逐渐应用于水电工程运输设备上,以解决传统的信号员指挥或设备作业区域限制的低效率防碰撞问题[1]。针对机群之间的智能防碰撞,令召兰[2]应用多Agent系统理论,建立了实时性和抗干扰性较强的塔机群防碰撞控制系统;朱宏堂[3]采用激光测距技术,解决塔机的碰撞问题,该方法对应用周期较短的塔吊作业适应性较好;许景波[4]等基于超声波测距原理,设计了塔机的防碰撞探测器,能有效避免碰撞事件发生。在运输设备与构筑物的防碰撞中,相关研究人员利用图形识别等多种技术解决吊装物本身与固定或移动目标的碰撞问题[5-6]。在监测数据采集和处理方面,贾永峰等[7]针对塔机起重量采集时存在非线性问题,采用数据拟合理论建立软测量模型,对起重量数据监测具有一定的应用价值;在防碰撞控制算法方面,李达等[8]提出机群防碰撞时等待时间最短算法,既保障了设备之间不发生碰撞,又提升了设备运输效率。
目前,门塔机的防碰撞方法中,通常以两种设备之间的距离作为决策依据。但是,缺乏对距离数据的处理,存在错误数据点,导致设备制动介入太晚,造成碰撞。因此,为了能够提高避碰的有效性,提出了基于时间连续、状态离散的马尔可夫过程的门塔机机群防碰撞方法。该方法根据门塔机状态间的转移关系,建立状态转移强度值与门塔机机群间相对位置的联系,做出门塔机机群防碰撞的最优决策,从而提高避碰系统的鲁棒性。
2 碰撞类型与预警等级划分
水电工程中,门塔机是具有回转机构一类的设备,且大量布置于施工现场,是常见的垂直运输设备。施工过程中,设备之间以及设备与构筑物之间会时常进入碰撞的危险区域,因此,需要明晰可能发生碰撞的情况以及预警等级。
2.1 碰撞类型
(1)高位门机或塔机吊绳与低位门机或塔机起重臂或平衡臂的碰撞
碰撞示意如图 1所示,阴影部分为交叉作业的危险区域,吊绳位于低位机起重臂或者平衡臂的下侧。对于塔机,lA和lB分别表示高位机和低位机的臂长;而对于门机,lA和lB分别表示高位机和低位机臂长在水平方向的投影。

图1 高低位垂直运输设备碰撞区域
高位机的吊绳与低位机的起重臂发生碰撞时:
①高位机和低位机具有交叉的作业区域,且都在交叉区域内作业。
②吊绳与大臂的最小距离d小于碰撞距离dBreaking。
(2)高度相同的门机或者塔机与其他具有回转机构的设备起重臂的碰撞
门塔机起重臂之间的碰撞示意见图 2。

图2 同高度垂直运输设备碰撞区域
高度相同,发生碰撞时:
①有交叉作业区域,且两台垂直运输设备同时处在交叉作业区域
②设备的起重臂的最小距离d小于碰撞距离dBreaking。
(3)门塔机吊绳与构筑物之间的碰撞见图 3,这种情形碰撞时:

图 3 垂直运输设备吊绳与构筑物碰撞区域
①吊钩的位置低于构筑物的位置,
②吊绳到构筑物的最小距离d小于碰撞距离dBreaking。
2.2 预警等级
设备不在交叉区域内作业,最小距离d大于安全距离dsafe,此时不会发生碰撞,相应的设备预警系统不会发出碰撞警告。随着设备之间的距离缩短,设备采取相应的行为进行碰撞预警,见图 4所示。

图4 碰撞区域预警与评估
其中,dBreaking、dAlarm、dWarning和dSafe为对应预警距离,门塔机防碰撞系统实时获取设备间最小距离d,然后根据d与其他4个位置之间的关系,将危险等级的划分如下:
①当d>dSafe时,设备间没有交叉作业的情况,各设备间不会产生干扰,因此,设备处于绿色安全状态;
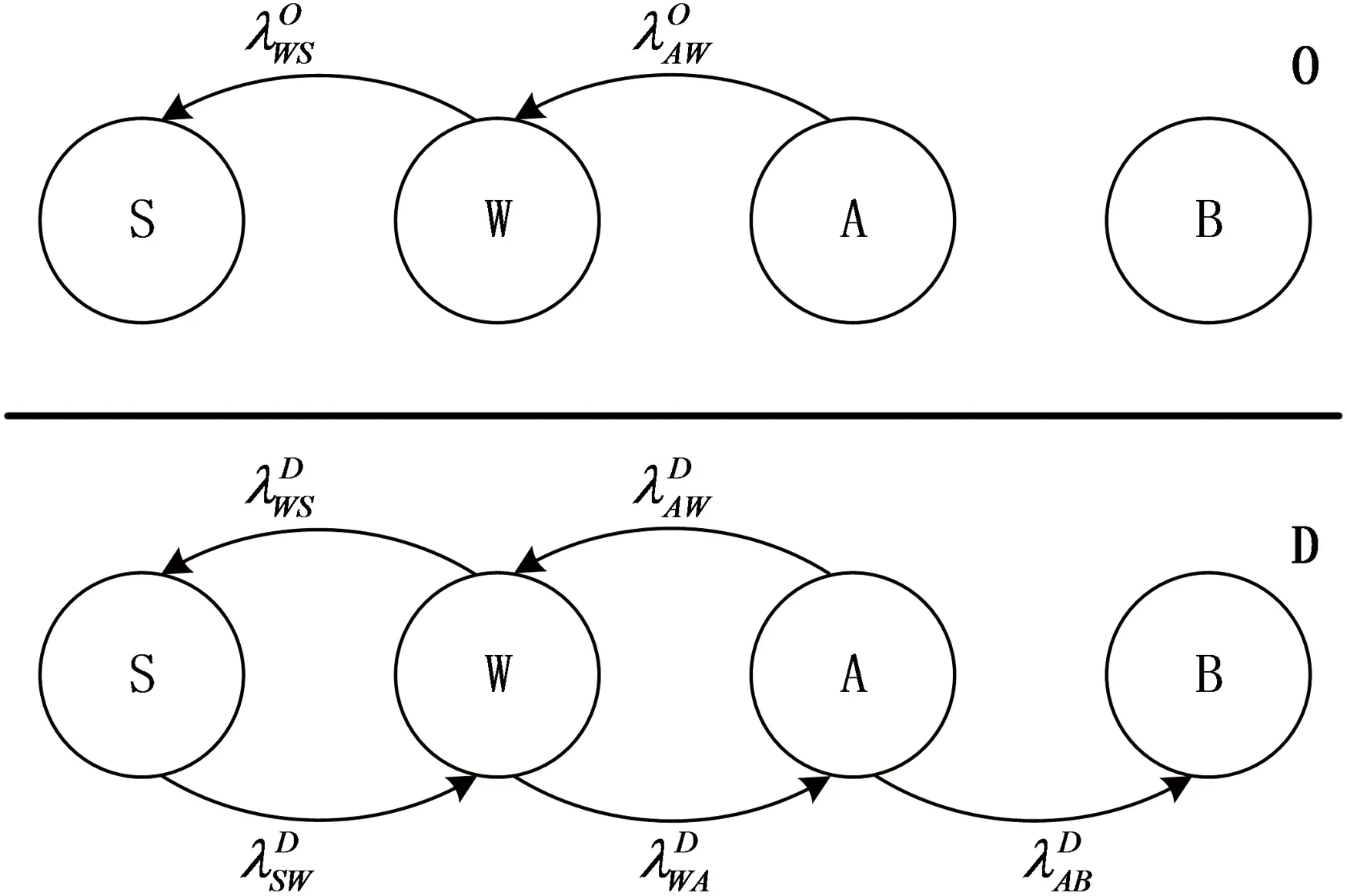
②当dWarning ③当dAlarm ④当dBreaking ⑤当d≤dbreaking时,设备发生碰撞,造成施工安全事件。 设备进入了交叉工作区域,且最小距离到达设定的预警距离以后,将采取相应措施预警。因此,保证设备间的最小距离的正确性对提升防碰撞系统安全性具有重大意义。 本文利用马尔可夫过程将最小距离转换为相应的碰撞概率,以保证系统的鲁棒性。马尔科夫过程是一个随机过程,主要表示了状态空间中各种状态的转换。该变化过程与前一时刻的状态有关,即使最小距离出现错误,设备不会因为最小距离的突然改变而使得当前状态发生跳变,只会根据前一时刻的状态向下一个状态转移或者保持当前的状态不变,也就是说,从一级预警跳变为安全状态等情况不会发生,这与实际设备的作业情况吻合。具体实现如下: 门机与其他辅助设备在进行作业时,根据相互之间的位置关系,通常可以分为四种不同状态:安全态(S)、预警态(W)、报警并减速态(A)和碰撞态(B)。 交叉作业时,相距太近,到达了初始设置的预警距离,设备就会从安全状态转为预警状态,处于预警状态的设备离开了预警距离就会转为安全状态。同理,当设备进一步靠近了制动距离,就会进入制动状态,开始报警并减速,同样,离开了制动距离,设备状态就会朝着预警状态转移。若减速不及时或者其他因素干扰可能造成设备碰撞,此时,处于碰撞的设备就是碰撞态,碰撞态是吸收态,一旦进入碰撞态,就会一直处于这个状态,不会转移到其他状态,实际中,只有通过人工作用,将处于碰撞态的设备分开到安全的位置。 设备在某一时刻只能处于一种状态,且状态的转移具有马尔可夫性,其转移关系见图 5,O表示在危险区域外的环境,D表示在危险区的环境。 图5 垂直运输设备状态转移关系 垂直运输设备的转移强度矩阵Q(t)=[qij(t)],i,j∈{S,W,A,B}如下: 当d>dSafe时,垂直运输设备处在危险区域外的环境,转移强度矩阵为: 当d≤dSafe时,垂直运输设备处在危险区域环境,转移强度矩阵为: 其中,λij为转移强度,矩阵的每一行满足: (1) 若在时刻t的状态概率向量为P(t)=[PS(t),PW(t),PA(t),PB(t)]T,根据福克普朗克方程有: (2) 式(2)可以通过下式迭代计算: (3) 通过记录两个位置点的时差和转移强度矩阵,根据式(3)可以计算当前点的状态概率向量。时间可以实时地记录,而转移强度矩阵计算采用距离的线性关系获得。 对于危险环境,即d≤dSafe,如式(4): (4) 对于危险环境以外的区域,转移强度设置为相应的基础转移强度。 若基础转移强度值为表 1,dSafe=100,且d=30和d=70处出现传感器或通信错误,随着两个设备的最小距离d增大时,状态概率的变化见图 6所示。 表1 不同环境中的基础转移强度 图6 状态概率向量的变化 从图 6可以看出,当d增大,设备会从碰撞态经过报警态和预警态转移到安全态。在d=30和d=70处,状态概率出现变化,但是波动范围较小,设备状态没有发生跳变。在报警态和预警态状态概率曲线的顶点处设置安全状态概率阈值,通过检测安全态概率,根据安全态概率与阈值即可做出相应的决策。 采用马尔可夫过程的机群智能防碰撞决策流程见图 7所示。 图7 门塔机防碰撞决策流程 为了验证垂直运输设备防碰撞决策方法的有效性以及可靠性,在岷江犍为航电枢纽发电厂工程中进行了相应的测试。该工程以门塔机为主,其他设备为辅的布置方式,施工现场由5台门机和1台塔机组成。测试过程中选择下游2台30t高架门机进行了防碰撞的测试,两台垂直设备的最小距离大于6m时,属于安全状态;小于4m时,处于预警态;小于3m时,处于报警并减速态。从2017年4月5日起,记录了一个校验周期内的5组数据,见表 2。 表2 预警状态测试结果 通过垂直运输设备的防碰撞试验结果可知,系统能够根据设备状态信息做出相应的预警,经过多组测试,预警结果与预期一致,满足防碰撞智能控制系统的性能要求。 此外,门塔机防碰撞智能控制系统运行2年以来,一级预警次数为15次,未发生一次碰撞事件,大大地提升了施工过程中的安全性。 本文针对水电工程门塔机群碰撞问题,提出了基于马尔可夫过程的防碰撞智能决策方法。该方法将距离数据进行了相应的处理,且依照预警等级划分了设备工作的不同运行状态,依据安全状态的概率启动设备的相应预警等级。在实际施工运行过程中,取得了良好的效果。3 基于马尔可夫过程的门塔机碰撞预警方法





4 防碰撞测试

5 结语
猜你喜欢
施工技术(中英文)(2022年21期)2022-12-12机械设计与制造工程(2022年8期)2022-09-19核科学与工程(2021年4期)2022-01-12中国金属通报(2020年2期)2020-12-09环境影响评价(2020年2期)2020-12-02农家参谋(2020年4期)2020-06-15智富时代(2018年7期)2018-09-03智富时代(2018年7期)2018-09-03科教导刊·电子版(2018年5期)2018-06-07科技资讯(2017年18期)2017-07-19