
下肢外骨骼机器人的刚度调控与仿真分析
2021-10-31 01:42陈勇马文彬吴维
大连交通大学学报 2021年5期
陈勇,马文彬,吴维
(大连交通大学 机械工程学院,辽宁 大连 116028)*
我国人口的老龄化越来越严峻,截止到2020年5月,65周岁及以上的老年人占全国总人口10.83%[1]. 脑瘁中、帕金森、阿尔兹海默症是老年人的常见病和多发病,每年新发病的患者约为200万,80%的患者会引起下肢偏瘫,导致下肢肌肉薄弱,无法提供足够的力量完成行走,不同程度丧失了运动能力,偏瘫较轻的老年人可以依靠轮椅进行运动,偏瘫严重的老年人需要常年卧床,经常引起褥疮、肌肉萎缩、静脉血栓、泌尿系统感染、骨质疏松等并发症,在身心方面长年忍受着常人体会不到的痛苦,给家庭和社会带来巨大的负担[2-4].
下肢外骨骼机器人穿戴在老年人的腿上,充当老年人穿戴者的外骨骼,帮助老年人重新站立和行走,促进血液循环,防止肌肉萎缩,减少并发症的发生,能够恢复老年人的运动能力和生活能力,重新回归社会[5-7].
目前的下肢外骨骼机器人虽然多种多样[8-10],但是很少考虑刚度变化和姿态调整,穿戴者与下肢外骨骼机器人的运动协同性较差[11],引起严重的位姿误差,限制穿戴者的运动灵活性,增加穿戴者的行走疲劳[12],制约下肢外骨骼机器人的应用[13].
气动肌肉具有高功率密度、轻质柔顺等特点,近年来很多科研机构逐渐开始将气动肌肉作为下肢外骨骼机器人的驱动方式,开展相关研究. Beyl等人采用气动肌肉对下肢外骨骼机器人进行力矩控制,穿戴者以0.7 m/s速度行走时,下肢外骨骼机器人可以实现小于2 N·m的跟随力矩[14]. Galle等人对气动肌肉的下肢外骨骼机器人进行研究,对穿戴者进行4 min的踝关节助力测试,助力时刻为49%±1%的步态周期,对穿戴者每侧肢体提供(0.11±0.2) W/kg的助力,可使穿戴者的代谢消耗降低12%[15]. Malcolm等人对气动肌肉下肢外骨骼机器人的助力效果进行分析,单侧穿戴时助力(0.136±0.008) W/kg,双侧穿戴时助力(0.133 ±0.006) W/kg,穿戴者的代谢消耗分别降低了7%和15%[16]. 浙江大学李超等人研究了气动肌肉驱动的全身型外骨骼机器人,采用PID控制算法,在幅值30°、周期8 s的正弦信号下,髋关节和膝关节的跟踪误差为±3°[17]. 浙江大学周心慰等人研究基于气动肌肉为驱动元件的下肢康复外骨骼机器人,搭建控制系统软硬件平台,完成下肢单关节的被动康复训练和下肢组合康复训练[18]. 浙江大学陶俊等人采用气动肌肉驱动下肢外骨骼机器人,利用关节角位移信号和足底压力信号获取穿戴者下肢运动信息,提出基于步态相位检测的人机协同运动控制方案,实现下肢外骨骼机器人与穿戴者在步行运动上的协同[19]. 气动肌肉的尺寸、大小和功耗是下肢外骨骼机器人驱动系统的关键性问题,如果选择较大尺寸的气动肌肉来满足穿戴者所需的关节力矩,就会影响下肢外骨骼机器人的便捷性和机动性,如何选择合适的气动肌肉与驱动方式,以及如何设计气动肌肉的布局是提升下肢外骨骼机器人灵活性能和助力效率亟待解决的难题[20].
为了解决现有技术存在的上述问题,本文根据人体下肢的刚度特性,利用仿生学原理,设计一种下肢外骨骼机器人,能够改变刚度,调整下肢外骨骼机器人与穿戴者的人机耦合姿态.
1 人体下肢的刚度特性
1.1 测试对象
采用随机抽样法确定测试对象,按照年龄和性别进行分组,测试对象的基本情况如表1所示,数据用均值±标准差表示.

表1 测试对象的基本情况
所有测试对象身体健康,没有做过各类下肢的手术,均无肌肉、骨骼、神经的疾病,不影响正常的行走姿态. 在测试开始前,向每位测试对象解释本次测试的步骤、目的和注意事项,采用自愿的形式,征得测试对象签字同意.
1.2 测试方法
利用Motion Analysis三维动作捕捉分析系统,实时记录测试对象在平地行走的步态数据,采样频率为300 Hz/s. 实验前,对Motion Analysis三维动作捕捉分析系统进行校正,确保动作捕捉的准确性,提高精度,降低误差. 调整镜头的空间位置和拍摄范围,保证完整记录测试对象每次行走的5个步态周期.
每个测试对象重复行走5次,每次行走之间让测试对象休息5 min,消除疲劳和自适应对步态参数的影响. 根据视频信息排除行走过程中的异常步态,同时去掉每组步态数据的头尾数据,避免测试对象在起步和停止时对数据分析的影响,保留的每组数据至少包括3个完整的步态周期.
1.3 测试结果
采用Morin刚度模型[3],计算人体运动的下肢刚度K:
(1)
(2)
(3)
(4)
式中,Fmax是地面最大垂直作用力,ΔL是人体腿部最大压缩量,tc是人体下肢单步支撑时间,tf是人体下肢单步腾空时间,m是人体下肢质量,L是人体下肢长度,v是人体下肢运动速度,Δyc是人体质心最大垂直位移.
利用Motion Analysis三维动作捕捉分析系统,实时记录测试对象以不同速度在平地行走的运动视频,提取人体下肢刚度方程(1)~(4)的参数值,获得测试对象的下肢刚度如图1所示.
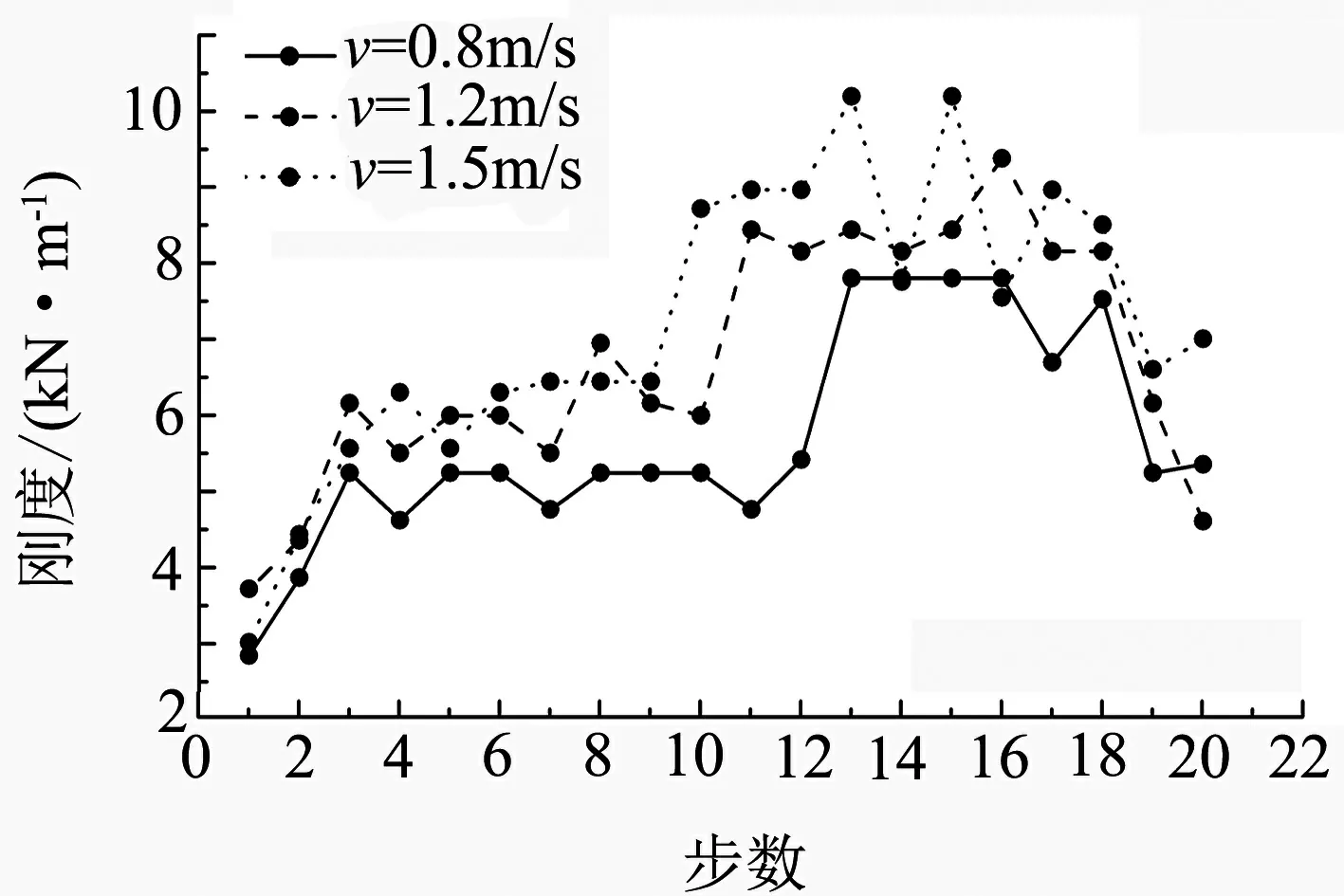
图1 测试对象平地行走的下肢刚度曲线
测试对象以不同速度在平地行走的下肢均值刚度如表2所示,为下肢外骨骼机器人的刚度调控提供仿生设计数据.
2 下肢外骨骼机器人的刚度调控
根据人体下肢的刚度特性,利用仿生学原理,设计一种下肢外骨骼机器人,能够改变刚度,调整下肢外骨骼机器人与穿戴者的人机耦合姿态.
调节下肢外骨骼机器人后腰和侧腰的长度,可以满足不同胖瘦的穿戴者,调节下肢外骨骼机器人大腿和小腿的长度,可以满足不同身高的穿戴者,保证下肢外骨骼机器人的关节轴与穿戴者的关节轴重合,提高穿戴者的舒适性和实用性. 下肢外骨骼机器人的结构参数如表3所示,关节活动范围如表4所示.

表3 下肢外骨骼机器人的结构参数

表4 下肢外骨骼机器人的关节活动范围
采用拮抗式气动肌腱驱动关节运动,调控下肢外骨骼机器人的刚度,不断变换下肢外骨骼机器人腿部与地面的接触状态和相互作用,让下肢外骨骼机器人保持合适的刚度,产生柔顺化的运动效果,缓冲和吸收地面的冲击力,适应环境的变化,保持运动姿态的稳定性,增强穿戴者的舒适性,提高穿戴者的运动灵活性. 气动肌腱采用德国FESTO公司的DMSP型气动肌腱,性能参数如表5所示.

表5 气动肌腱的性能参数
下肢外骨骼机器人左右腿的髋关节和膝关节安装美国ADI公司的S16477型惯性传感器,实时采集转角信号,经过信号调理和数模转换,进行动作生成与运动反解,获取穿戴者左右腿髋关节和膝关节的角速度与加速度,解算出穿戴者腿部的三维位姿,自适应调控拮抗式气动肌腱的刚度,提供穿戴者所需的髋关节力矩和膝关节力矩,帮助穿戴者行走,实现下肢外骨骼机器人与穿戴者的动作一体化,突破刚体结构对于穿戴者的运动限制,提高步态稳定性和环境适应性.
3 下肢外骨骼机器人的仿真分析
利用三维建模软件Catia建立穿戴者与下肢外骨骼机器人的三维模型,如图2所示.

图2 穿戴者与下肢外骨骼机器人的三维模型
根据下肢外骨骼机器人的运动特性,设置各个构件的物理特性和约束关系,添加驱动元件,设置驱动函数完成仿真运动.
下肢外骨骼机器人的约束关系(见表6),设置动态仿真的边界条件.
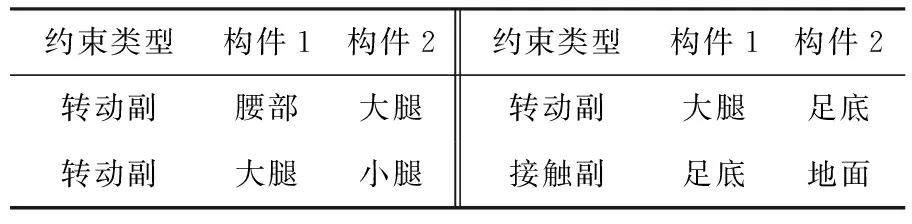
表6 下肢外骨骼机器人的约束关系
在运动副添加驱动元件,设置相应的驱动函数:
下肢外骨骼机器人左腿髋关节的驱动函数STEP(time, 0, 0, 0.55, -42d)+STEP(time, 0.55, 0, 0.9, 42d)+STEP(time, 0.9, 0, 1, -5d);
下肢外骨骼机器人左腿膝关节的驱动函数STEP(time, 0, 0, 0.15, -16d)+STEP(time, 0.15, 0, 0.4, 15d)+STEP(time, 0.4, 0, 0.75, -55d)+STEP(time, 0.75, 0, 1, 56d);
下肢外骨骼机器人右腿髋关节的驱动函数STEP(time, 0, 0, 0.3, 39d)+STEP(time, 0.4, 0, 0.9, -42d)+STEP(time, 0.9, 0, 1, 3d);
下肢外骨骼机器人右腿膝关节的驱动函数STEP(time, 0, 0, 0.15, -30d)+STEP(time, 0.15, 0, 0.4, 15d)+STEP(time, 0.4, 0, 0.75, -55d)+STEP(time, 0.75, 0, 1, 60d).
穿戴者为男性,身高1.75 m,体重75 kg,下肢外骨骼机器人的总体质量10 kg,调节下肢外骨骼机器人后腰、侧腰、大腿和小腿的长度,保证下肢外骨骼机器人髋关节、膝关节和踝关节的旋转轴与穿戴者相应的关节轴重合.
以运动速度0.8 m/s为例,仿真时间1.86 s,步数100,进行动态仿真,获得下肢外骨骼机器人的刚度曲线,如图3所示.

(a) 大腿的刚度曲线
(b) 小腿的刚度曲线图3 下肢外骨骼机器人的刚度曲线
穿戴者与下肢外骨骼机器人以运动速度0.8 m/s在平地行走的过程中,下肢外骨骼机器人左侧大腿刚度的最大值36.91 kN/m,最小值0.02 kN/m,均值刚度12.53 kN/m;下肢外骨骼机器人左侧小腿刚度的最大值12.56 kN/m,最小值0.01 kN/m,均值刚度4.14 kN/m;相对于测试对象的下肢均值刚度5.69 kN/m,下肢外骨骼机器人左侧大腿均值刚度增大6.84 kN/m,为穿戴者提供稳定支撑,下肢外骨骼机器人左侧小腿均值刚度减小1.55 kN/m,产生柔顺化的运动效果,缓冲和吸收地面的冲击力;下肢外骨骼机器人右侧大腿刚度的最大值38.25 kN/m,最小值0.09 kN/m,均值刚度12.72 kN/m;右侧小腿刚度的最大值10.39 kN/m,最小值0.01 kN/m,均值刚度4.43 kN/m;相对于测试对象的下肢均值刚度5.69 kN/m,下肢外骨骼机器人右侧大腿均值刚度增大7.03 kN/m,为穿戴者提供稳定支撑,下肢外骨骼机器人右侧小腿均值刚度减小1.26 kN/m,产生柔顺化的运动效果,缓冲和吸收地面的冲击力. 下肢外骨骼机器人的刚度调控范围满足穿戴者下肢的刚度变化范围,能够提高穿戴者的运动灵活性.
4 结论
本文设计的下肢外骨骼机器人优势在于,满足穿戴运动要求的同时,能够根据外界环境和运动方式自适应调节刚度,具有较好的灵活性.
(1)采用Motion Analysis三维动作捕捉分析系统,记录人体以不同速度在平地行走的运动视频,获得人体下肢的刚度特性,为下肢外骨骼机器人的刚度调控提供仿生设计数据;
(2)利用三维建模软件Catia建立穿戴者与下肢外骨骼机器人的三维模型,进行动态仿真分析,研究结果表明,穿戴者与下肢外骨骼机器人以运动速度0.8 m/s在平地行走的过程中,下肢外骨骼机器人左侧大腿均值刚度增大6.84 kN/m,下肢外骨骼机器人右侧大腿均值刚度增大7.03 kN/m,为穿戴者提供稳定支撑;下肢外骨骼机器人左侧小腿均值刚度减小1.55 kN/m,下肢外骨骼机器人右侧小腿均值刚度减小1.26 kN/m,产生柔顺化的运动效果,缓冲和吸收地面的冲击力;下肢外骨骼机器人的刚度调控范围满足穿戴者下肢的刚度变化范围,能够提高穿戴者的运动灵活性,具有广阔的应用前景.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
轻兵器(2019年5期)2019-06-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
劳动保护(2018年5期)2018-06-05
现代兵器(2017年4期)2017-06-02
发明与创新·中学生(2017年5期)2017-05-12
