基于DBSCAN-3σ的雷达去噪算法研究
2021-10-30 05:00:00张荣福
光学仪器 2021年4期
张 浩,张荣福
(上海理工大学 光电信息与计算机工程学院,上海 200093)
引 言
随着现代电子科学技术的发展,微波雷达技术广泛应用于军用和民用领域,越来越多的探测设备都需要雷达技术的支持。与传统的传感器相比,微波雷达具有发射功率低、分辨率高以及穿透性强等特点。这些特点使得微波雷达技术在运动目标检测方面具有较大的优势,可以在医疗、救援搜索等[1-3]领域发挥越来越重要的作用。
微波雷达发射电磁信号时,由于多普勒效应,其回波信号会携带被测目标的运动特征。然而,由于系统本身的高灵敏度,检测目标背景仍会产生大量噪声,目标运动信息很容易淹没在背景噪声中,以致影响运动信息的特征提取,所以去噪成为发挥雷达探测能力的关键。目前,常用的去噪和数据提取算法主要有:经验模态分解算法(empieical mode decomposition, EMD)、小波变换、基于机器学习的去噪算法等。
Wang等[4]以EMD的阈值去噪算法为原型,提出了一种对雷达信号进行奇异谱约束的总体经验模态分解(EEMD)改进算法。这种方法将雷达信号分解成若干固有模态函数(IMF),通过过滤含有噪声的IMF来去噪。但经验模态分解方法存在模态混合的问题,导致时频分布严重混叠,在信噪比低时存在性能不稳定、信号失真,不能有效去噪。Nguyen等[5]结合连续小波变换和EMD算法进行去噪,从雷达回波信号中检测出短时心血管脉冲。小波变换虽然有良好的时频分辨率,但结果主要取决于小波基函数的选择,不具有很好的稳定性。Huang等[6]使用生成对抗网络(GAN)进行微波雷达回波时域图去噪,这种网络具有较强的去噪性能,能够消除各种级别的噪声,无需估计噪声强度。但是,这种方法需要大量的数据训练模型,在实际使用时可能没有较多的数据集用来训练,从而导致过拟合,去噪性能达不到最佳。
聚类算法是数据处理中的一项重要技术,它可以根据数据对象之间的相似性,将差异最小的数据对象归为一类。在雷达信号的去噪中,可以利用聚类分析的特殊性来弥补传统去噪方法的不足。而通常的聚类算法(如k-mean均值聚类算法等)仅适用于样本数据分布相对规则的情况;且需要预设或假设雷达噪点的个数,一旦雷达噪点个数预设不正确将对去噪效果产生严重的影响。本文在研究雷达检测目标位移回波信号的基础上,提出一种结合DBSCAN(density-based spatial clustering of applications with noise)聚类算法和拉依达准则(3σ)去噪方法,并通过雷达实测数据进行验证。
1 基于CW雷达的检测系统
雷达是一种无线电检测技术,主要包括脉冲雷达和连续波雷达。其中脉冲雷达有瞬间的功率变化且功率变化大,硬件成本较高,一般用于远距离目标的检测中。连续波雷达主要分为单频连续波(continuous wave, CW)雷达、调频连续波(frequency modulated continuous wave, FMCW)雷达等。雷达检测系统可对目标进行非接触式检测,提高雷达发射频率可以检测目标的运动状况,采用连续波这种方法可探测到目标毫米级的运动,适合于近距离的位移测量。图1为CW雷达检测系统原理框图。信号处理单元控制雷达前端产生发射信号,通过发射天线(TX)发出。接收天线(RX)接收回波信号,模拟信号处理电路(ASP)对回波信号进行处理,并使用模拟数字转换器(ADC)将处理后的模拟信号转换为数字信号,数字信号再经信号处理单元提出信号中所需要的信息,最终结果由外围设备进行显示。
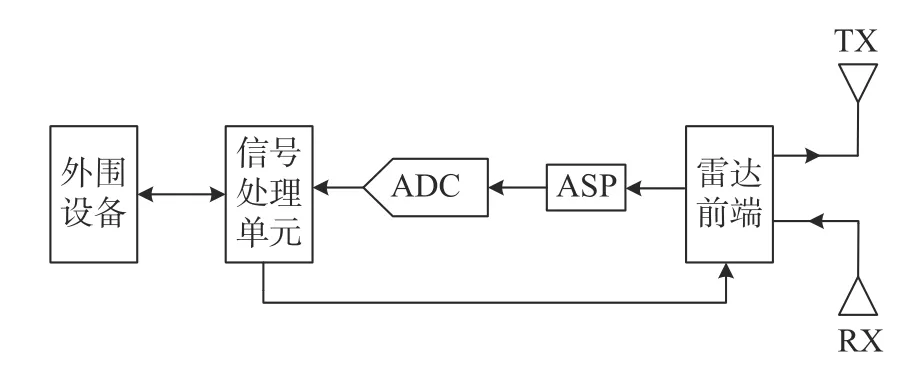
图1 雷达原理框图Fig.1 Block diagram of radar principle
本文在采集数据的雷达前端使用等幅正弦波发射,采用零中频接收机结构,雷达载波工作频段为24 GHz。为节省体积,收发天线采用微带贴片天线。模拟信号处理电路主要实现信号的放大滤波和电平搬移,模数转换使用24 bit高精度ADC。信号处理单元用于数字信号处理和调控各级联单元的工作,同时信号处理单元与外围设备相连。信号处理单元一方面实现检测结果的输出,另一方面实现用户对控制信号输入,设置系统各种参数等功能。
CW雷达一般采用正交接收机,这样可以产生同相和正交(I/Q信道)信号输出。正交接收机的原理如图2所示。发射天线发出的恒频连续波可表示为

图 2 正交接收机原理图Fig. 2 Principle diagram of quadrature receiver

式中: ω0是发射波的圆频率; φ 是初相位。
如果被测目标到雷达的径向距离为 d ,则接收天线收到的回波信号可表示为

式中: φ′是在初相位的基础上叠加了半波损失和其他相位损失后的相位部分; c 是光速,表达式中的振幅采用了归一化表达。
在正交接收机中,本振信号进入正交解调器中,然后输出相位差为90°的同源信号。雷达回波信号通过低噪声放大器(LNA)放大,变为输出功率相等的两路信号,这两路信号分别与相位差为90°的同源信号混频并滤波,得到以下两路基带信号:

在实际测量环境中,可能会有静止物体、杂波以及其他运动物体的回波干扰,为简单起见,可以只考虑固定物体和固定杂波的干扰。对于这种干扰,混频的信号是一个直流信号,相当于在式(3)和式(4)的基础上增加了固定的直流分量I0和 Q0。由于两路基带信号来源于两个通道,很难达到理想的等幅正交,需考虑直流分量和振幅的不平衡。在有干扰情况下,基带信号的表达式为:

根据三角函数关系, I (t) 、 Q (t) 满足方程

由式(7)可以看出 I (t) 、 Q (t) 的合成轨迹是一个椭圆。通过椭圆拟合算法可以得到 I0、 Q0、A 、 B 的值,进而求出输出信号的相位,即

假如初始时刻的相位为 φ0,末时刻的相位为 φ1,则可通过初末时刻的相位差得到目标的位移变化,即
由式(9)可知,相位与障碍物的位置有关,通 过相位变化可以反映目标的相对位移变化。
2 基于DBSCAN-3 σ 的去噪算法
2.1 DBSCAN聚类算法
在雷达回波信号的处理过程中,回波信号的去噪是重要一环。由上述可知,两路基带信号(利用最小二乘法)合成的轨迹为椭圆,这两路信号的反正切值即为相位信息。但由于回波信号中有噪声的影响,两路基带信号仍会出现幅度失衡和相位失衡的情况,拟合的椭圆也会有误差,因此在椭圆拟合之前需要对原始雷达数据进行去噪处理。本文提出DBSCAN-3σ的去噪算法:首先利用DBSCAN聚类算法将雷达数据进行分类,由于噪点一般是随机出现且时间较短,因此聚类结果中的不属于任何簇的离群点即为噪点;然后基于拉依达准则对剩余数据点进行处理,将幅度较小的噪点分辨出来;最后将去噪后的数据用最小二乘法进行椭圆拟合,根据式(9)得到目标的位移信息。
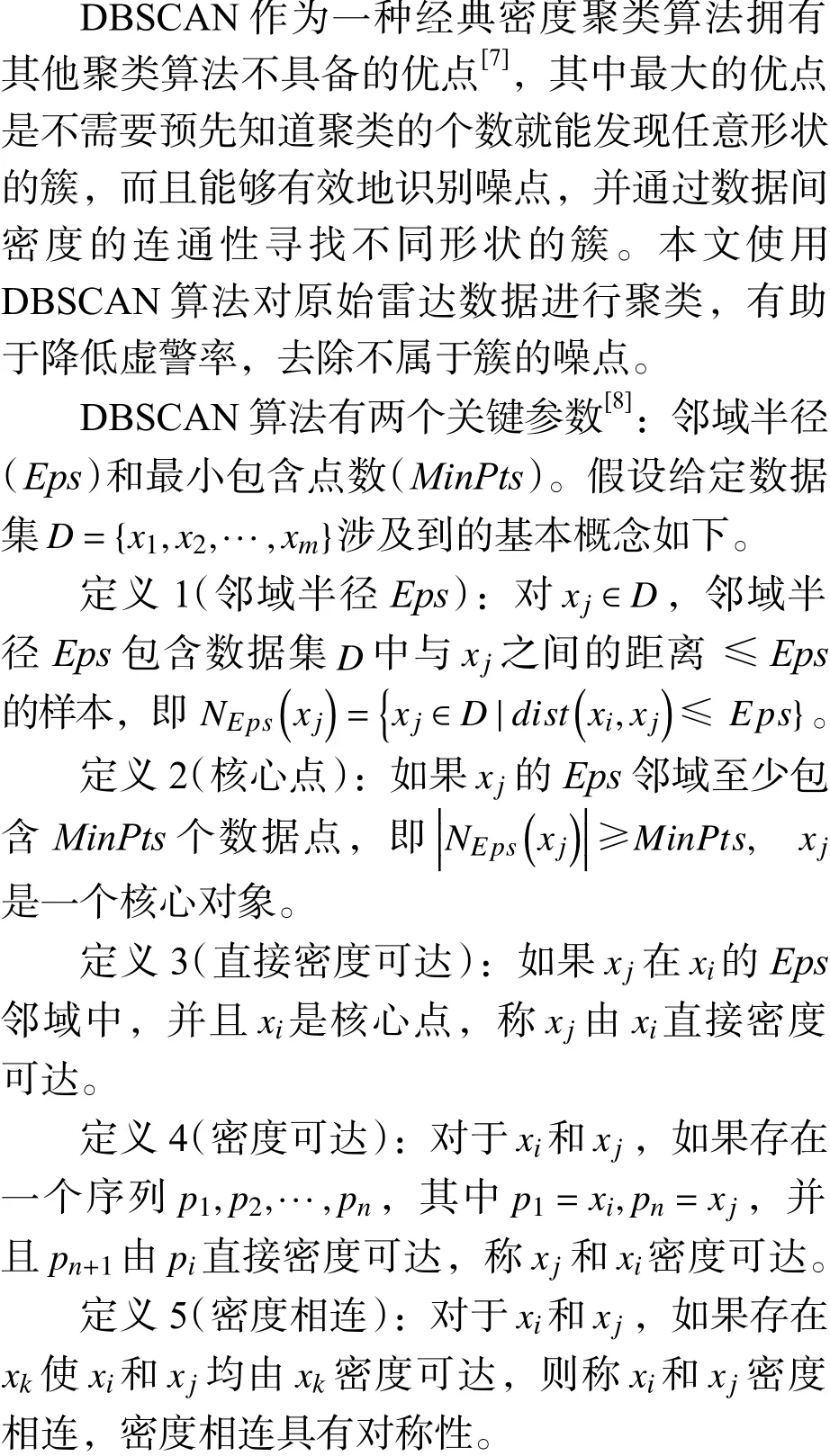
定义6(边界点):对 xj∈D ,如果 xj不是核心点,但是 xj由核心点密度可达,则 xj为边界点。
定义7(类簇和噪声):从数据集 D 中任取一点 p ,从 p 点开始在 D 中搜索满足Eps和MinPts条件且密度可达的所有点构成一个簇,不属于任何簇的点则被标记为噪点。
基于上述概念,DBSCAN算法的核心是:在数据集中任选一点 p 作为起始点,根据Eps和MinPts,查找所有从 p 点密度可达的点;如果是核心点,那么在Eps邻域内的所有候选点为一个簇,然后通过考察候选点的密度来进一步扩大这个簇,直至最终完整的簇被找到;如果 p 不是核搜寻心完点毕,,则数继据续中搜不寻属下于一任个何点簇,的直点至即所为有噪的点点[都9]。
2.2 拉依达准则
拉依达准则是以三倍观测值的标准差 σ 作为极限取舍的标准,因此拉依达准则也被称作 3σ准则。标准差 σ 为经过大量重复观测后计算出的参数,其计算式为
2.3 基于DBSCAN-3 σ 的椭圆拟合算法
本文去噪方法可以分为两步:首先要设置聚类参数,对雷达原始数据进行DBSCAN聚类,根据密度特征会将数据分为若干不同的簇,去除不属于任何簇的噪点;然后根据拉依达准则去除影响较大的奇异值。根据去噪后的结果,对数据进行椭圆拟合,计算去噪后的线性误差和线性度。为了验证算法的有效性,利用半径滤波算法与本文算法进行对比。算法流程图如图3所示。
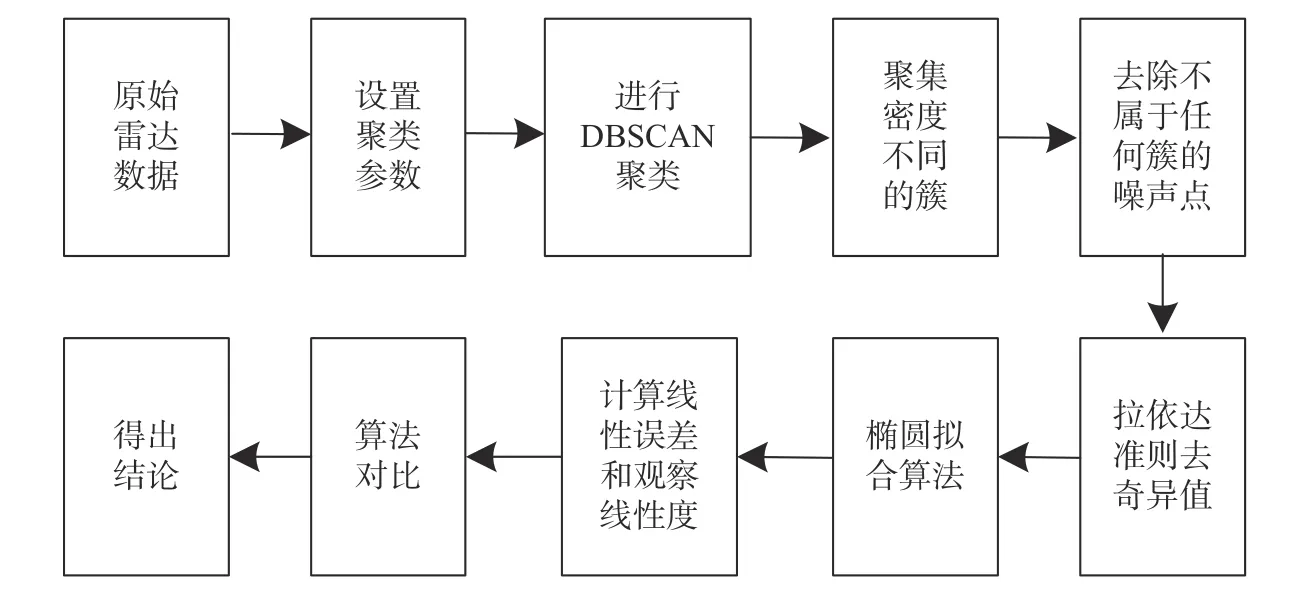
图3 算法流程图Fig.3 Flow chart of the algorithm


式中n是采集数据点的总数。
式(13)中 ( xi,yi) 为曲线上任一点,则雷达数据集中各点到椭圆曲线的欧式距离为

该组数据点的算术平均值可表示为

残差为

若残差 lb(i) 位于 [−3σ,3σ] 外,则进行第二次筛选,将其认为噪点并剔除。
重复以上步骤直至所有的点都在 I ¯+3σ 范围以内为止。
3 实验结果与分析
3.1 实验结果
本文以CW雷达为实验平台采集实验数据,使用的雷达传感器为ADI公司的ADF4158芯片和Infineon公司的BGT24MTR芯片组成的毫米波雷达模块,工作频率为24 GHz,能够提供毫米级的距离分辨率。雷达采用微带贴片天线收发信号,DC电源为雷达提供直流电。NI公司的PXI-4461高精度数据采集模块负责数据采集,然后将信号输入到计算机中,使用本文提出的算法并采用MATLAB软件进行处理。
图4 为实验环境和设备,在步进电机上固定一块金属反射板作为被测目标,控制步进电机的运动方向垂直于雷达的收发天线。反射板初始时刻距离雷达天线80 cm,控制步进电机以20 mm/s的速度匀速运动80 mm。数据采集卡接收到的信号传输到计算机上,经过正交接收机,基带信号输出为I/Q两路,将这两路信号在垂直方向上进行叠加。图5是采集到的原始数据,其中:(a)显示了I/Q两路信号合成轨迹图及椭圆拟合;(b)为反射板随时间位移图;(c)为相对位移的误差分布图。由图5可知,椭圆主体的采样点即为雷达采集到反射板运动的数据,但采样点中含有较多杂散的噪点,使得拟合出的椭圆发生形变,对计算目标的相对位移产生了影响,导致(b)中的线性度较差,有明显的起伏,并使(c)中的反射板相对位移的最大线性误差也达到了12 mm。

图4 实验环境与设备Fig.4 CW radar module and dual rail module
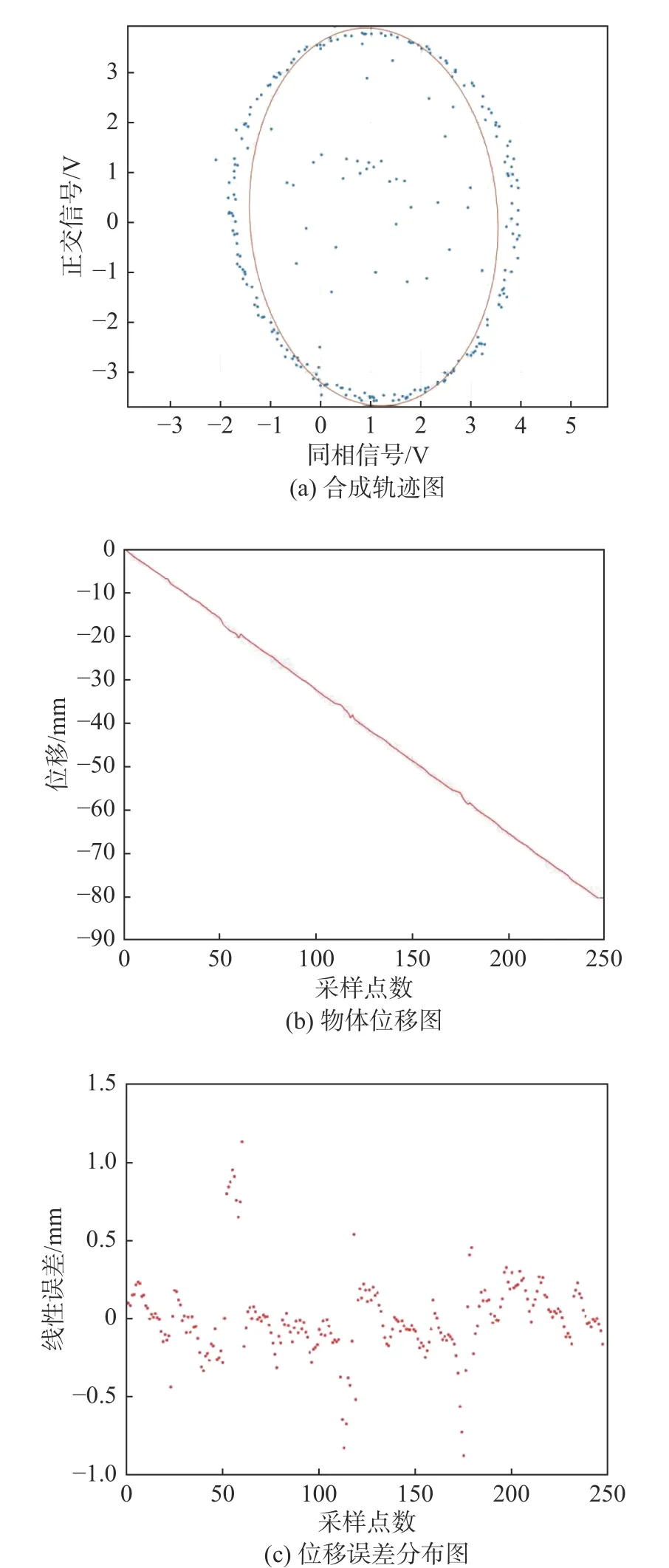
图5 原始数据图Fig.5 Raw data
利用上述算法,对雷达测量的原始数据进行处理。在DBSCAN聚类算法中,将Eps设为0.3,MinPts设为4时聚类情况较好。图6为雷达数据聚类图,从图中可以看出,根据密度不同将数据点分为颜色不同的五种聚类群,空白的点是不属于任何簇的噪点,可见椭圆内部大量的噪点已经被去除。
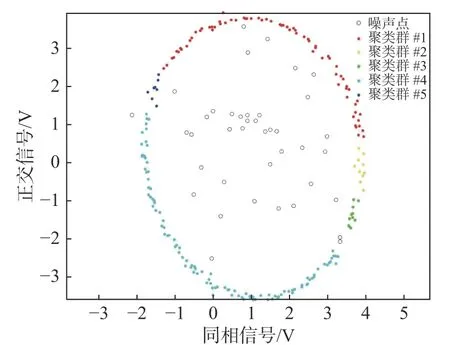
图6 雷达数据聚类图Fig.6 Clustering graph of radar data
经过DBSCAN-3σ算法处理,噪点基本已经被去除。将处理后数据进行椭圆拟合,计算其相对位移和线性误差,结果如图7所示。由图7可知,经过聚类算法和拉依达准则去噪后的拟合效果优于去噪之前,见(a)图;物体随时间位移图像较原始数据更加平滑,线性度更好,见(b)图;图中去噪后的线性误差极值要远小于之前,线性最大误差从12 mm降低到0.36 mm,明显消除了噪声对数据的干扰,见(c)图。
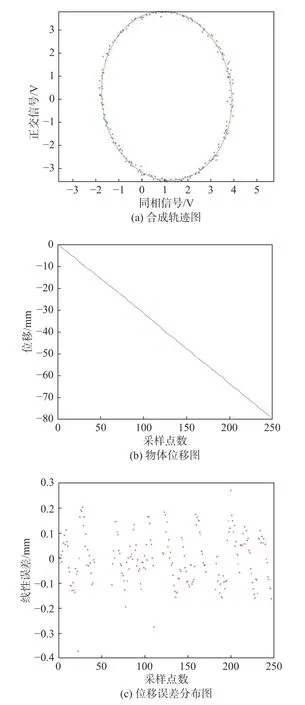
图7 DBSCAN-3σ去噪结果图Fig.7 DBSCAN-3σ denoising result
3.2 算法对比
半径滤波算法也是常用的去噪算法,其原理是假设数据中每一个点在给定的半径Eps内至少存在MinPts个点,符合假定条件的点作为信号点保存下来,不符合条件的点作为噪点除去,其中半径Eps以及数值MinPts由人工指定。观察半径滤波结果,并与本文去噪算法结果进行比较,去噪后数据如图8所示。
由图8可以发现,半径滤波的结果起伏非常大,半径滤波对悬空的孤立点或无效点具有很好的去除效果,但对于聚集的噪点,其去噪准确性相对于DBSCAN-3σ算法较低。
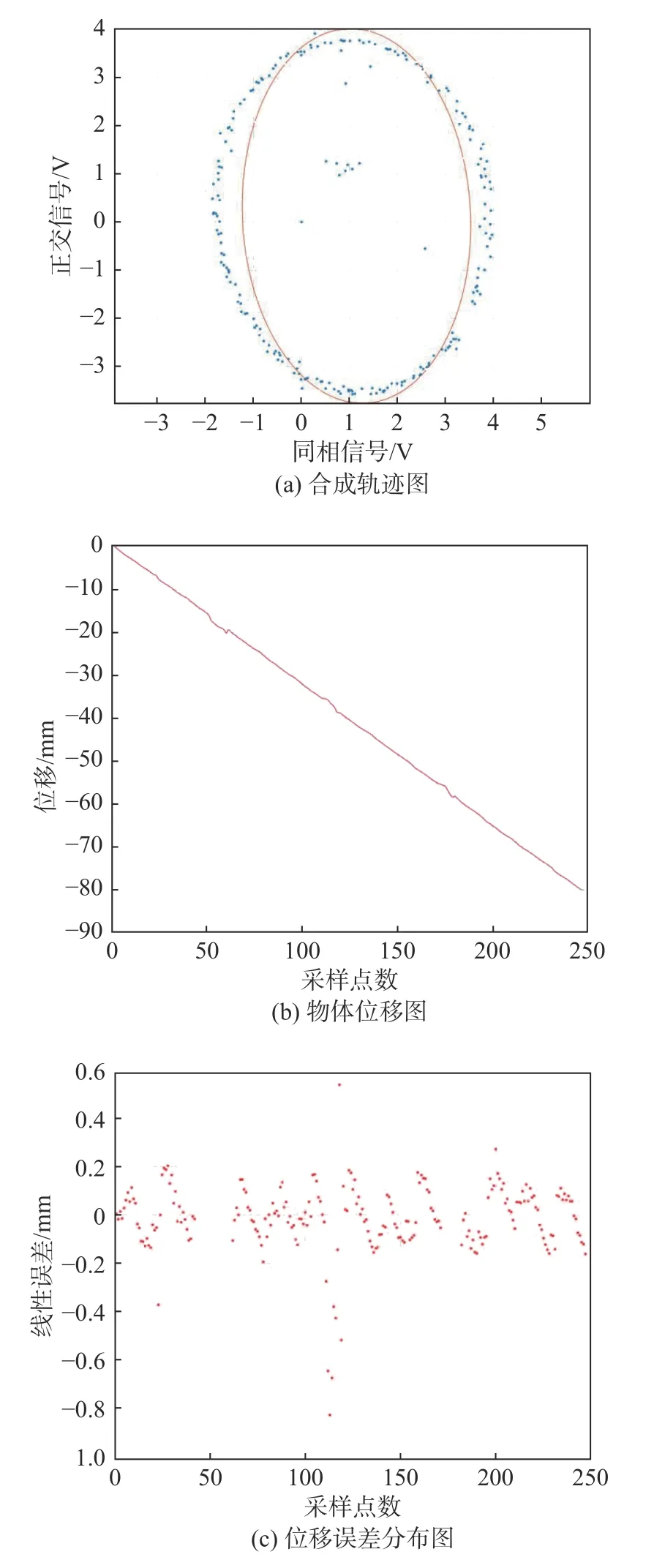
图8 半径滤波结果图Fig.8 Radius filtering result
3.3 算法特性分析
DBSCAN-3σ去噪算法是根据信号与噪声之间的密度不同来进行去噪。对于DBSCAN聚类算法,其时间复杂度取决于确定Eps和MinPts后且查找Eps领域中的点所需要的时间,所以DBSCAN算法的基本时间复杂度为O(N*Eps领域扫描点所需要的时间,其中N为扫描点的个数)。在设置参数不合理的情况下,Eps领域需要扫描雷达数据中所有的点,最坏情况的时间复杂度为O(N2)。对于3σ准则剔除离群噪点,时间复杂度为O(N)。因此DBSCAN-3σ算法时间复杂度为O(N2)。而对于半径滤波算法,需要假设数据中的各个点在给定的范围Eps内至少有MinPts的近邻点,所以时间复杂度也为O(N2)。DBSCAN-3σ算法相较于半径滤波算法具有相同的时间复杂度,经过实验验证,该算法在去噪结果的准确性上优于半径滤波算法且计算复杂度低,对于动态信号去噪具有很好的实时性。
雷达的噪声包含静止物体杂波和运动物体杂波,其中静止物体杂波对于检测影响较小。运动物体杂波主要是人为干扰,相较于探测目标的运动信号,运动物体杂波信号出现的时间较短,在时域图中密度稀疏。DBSCAN-3σ算法不需要事先知道噪声的数量和来源,只根据噪声和信号的密度不同去噪,所以该算法对雷达在复杂环境中去噪具有很好的稳定性。
4 结 论
本文提出了一种连续波雷达的DBSCAN-3σ去噪算法,该算法基于信号和噪声之间的密度不同来进行去噪,因此具有很好的可行性。通过实验验证,该算法对噪声有很好的剔除效果,提高了雷达在检测的准确度,证明了该方法在原始雷达信号处理上可以获得更好的降噪效果。
猜你喜欢
数学杂志(2022年5期)2022-12-02 08:32:10
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:38
摄影之友(影像视觉)(2020年4期)2021-01-09 10:10:10
中学数学杂志(2019年1期)2019-04-03 00:35:42
制导与引信(2017年3期)2017-11-02 05:17:02
摄影之友(影像视觉)(2017年3期)2017-04-28 02:34:31
福建中学数学(2016年4期)2016-10-19 05:09:02
摄影之友(影像视觉)(2016年5期)2016-09-13 02:37:47
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18