埋地非金属管线的智能预测与定位可视化研究
2021-10-22 09:32王文明郭建强张桂瑞乔振铭赵永卓汤凯何令普
油气田地面工程 2021年10期
王文明 郭建强 张桂瑞 乔振铭 赵永卓 汤凯 何令普
1中国石油大学(北京)机械与储运工程学院
2北京中油建设项目劳动安全卫生预评价有限公司
3大庆油田第四采油厂
4长庆油田第四采油厂
随着智慧数字化油田建设不断发展,各油气田设备技术产业均走向数字化,使得数据存储、技术控制更加完善[1]。但由于油气田不同发展阶段的需要,使得按照不同工业需求建设的管线埋设错综复杂,并且由于技术等原因相关资料记录不明确、地下管线空间不可见,管线种类多和埋设多样性等特点,决定了埋地管线探测必然是一项具有复杂性和涉及多方面学科的技术[2]。准确的管线资料是避免事故的前提,常规的金属管道可以通过金属探测方式进行定位探测,但是非金属管道则很难通过这种方式进行探测[3]。
国内外非金属管线探测方法主要包括地质雷达电磁波法、示踪电磁感应法、非金属管线声波测位法以及高密度电阻率法[4-8]。另外还包括一些数据后处理方法,如时域分析法、频域分析、小波分析以及神经网络分析法等[9-10]。针对以上方法,地质雷达电磁波法作为非金属管线探测相对有效的方法被国内外大量研究与应用,加拿大Guelph 大学工程学院针对探地雷达资料解释进行研究,利用复折射率模型(CRIM)解释地质雷达资料可以更好地辅助GPR 资料解释[11];上海锐特测绘有限公司袁建华通过应用加拿大EKKOl00 型探地雷达,对其应用于地下管道探测的效果进行了分析并取得有益成果[12];湖北省建筑工程质量监督检验测试中心鲁勇波利用LD6000 管线探测仪对宜昌市某污水处理厂内管线进行探测,该探测仪提供了四种管线探测方式,其中示踪法主要用于排水等非金属管道,且受管道内条件限制大,应用较少[13]。普渡大学对于利用GPR 对地下管线探测进行去噪算法的改进[14]。但探地雷达对于大深度小管径非金属玻璃钢管道应用却很少,其可行性和准确度有待考证。因此,提出了一种依据电磁法(EM)来检测非金属污水管线的定位方法。
基于电磁法检测非金属污水管线的定位方法,进行非金属管线电磁检测实验,并得到相关磁场分布特征和数据。其次,利用BP 神经网络将已有管线信息数据进行训练,经过验证测试得到合理地网络net,最终调用net 预测非金属管线的管径大小。调试硬件添加GPS 模块并做数据采集系统,利用GPS 信息采集确定管线走向的位置信息,将信息数据后处理后进行Mapping 定位计算,并进行可视化显示。
1 非金属管线检测方法
1.1 方法原理
管线探测仪依据电磁法探测管线,其根本在于金属管线的导电性。地下管线探测的理论基础是电磁感应定律。将地下管线视为无限长直导线,当对其施加交变信号时,就成为无限长载流直导线。由右手螺旋法则可知,该载流直导线周围空间存在磁感应强度。此方案中管中污水视为无限长导线,玻璃钢管视为导线绝缘层,增加了探测效果,不再直接探测管道,而是通过检测定位管道内部污水介质确定管道走向与深度。
在电磁学里,时变电场可以生成磁场,而根据法拉第感应定律,时变磁场又可以生成电场。这样,两个方程在理论上允许自我维持的电磁波传播于空间。利用麦克斯韦方程来求解电磁学问题[15],其微分形式为
式中:H为磁场强度,A/m;J为电流密度,A/m2;D为电位移矢量,C/m2;B为磁感应强度,Wb/m2;ρ为电荷密度,C/m3。
式(1)表示麦克斯韦-安培定律的定量关系,表示稳定的电场和变化的电场都可以产生磁场。式(2)表示高斯磁场定律,代表磁通守恒定律,也表示了磁通量的连续性,并且磁力线没有起始点。
1.2 实验论证
采用管线探测仪进行非金属管道测量,不再直接探测管道,而是通过检测定位管道内部污水介质确定管道走向与深度。如图1 所示,将发射机电极改造为钻头电极,并配置相应非金属管线密封卡座连接装置,地面接收机接收信号来探测管线。
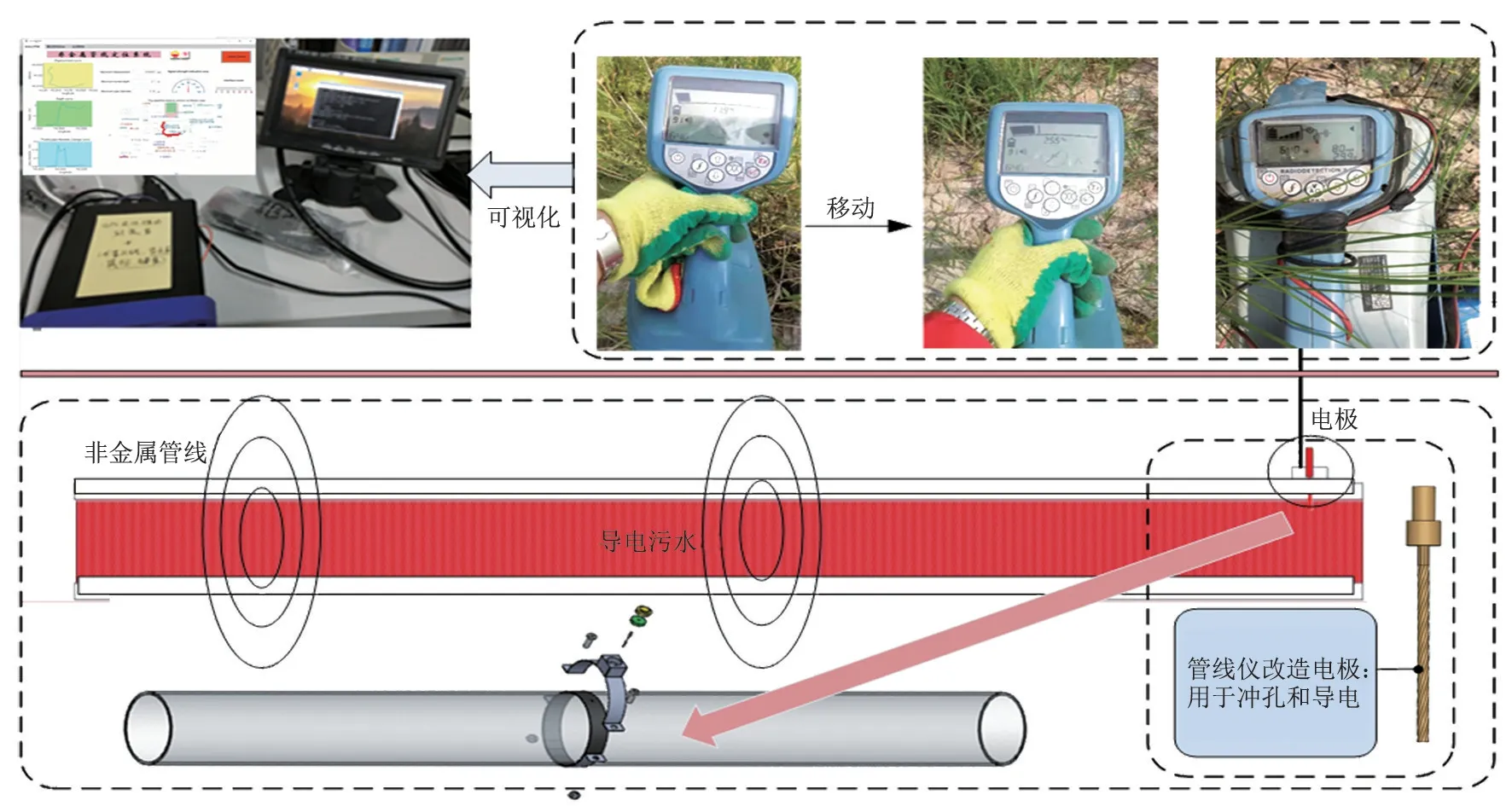
图1 非金属管线检测实验Fig.1 Non-metallic pipeline inspection experiment
以上实验表明,通过检测定位管道内部污水介质确定管道走向与深度的非金属管线检测方法是有效的。并且从管线仪可以得到管线埋深、电流大小以及磁场强度等数据信息,为后续建立数据库奠定了基础。
依据以上非金属管线探测方法,得到相关管线数据作为数据库,利用BP 神经网络进行学习训练,对非金属管线管径大小预测,可以弥补管线探测仪仅可测深、导向功能之外的空缺,真正实现管线特征一体化检测。
2 非金属管线管径预测
神经网络是近年来一种发展迅速的前沿交叉学科,它可以实现网络输入因子和网络输出目标之间的高度非线性映射。基于MATLAB 编程的BP 神经网络能有效地预测非线性关系[16]。它由一个非线性自适应动态系统组成,可以在不同层级上模仿大脑的信息处理机制,可以灵活方便地对多原因的、复杂的未知变量进行建模。
采用BP 神经网络进行预测时网络的结构包括输入层、隐藏层和输出层。根据式(3)确定BP 神经网络的隐藏层的神经元数目。

式中:p为隐藏层神经元数目;m为输入参数的数目;n为输出神经元的数目;a为常数,并且a∈[1,10]。
在确定隐藏层的神经元数目时,为了防止过拟合和欠拟合,根据预测值和测量值之间的相关系数,将神经元数目由小变大依次进行训练并测试其准确性。通常选择一个小的非零随机数作为神经网络模型的初始权重,根据经验,通常在(-2.4/F,2.4/F)之间取值。
当使用管线探测仪探测管线时,可以直观看到信号强度、电流大小以及管线埋深,却无法得到管径的信息,因此,需要研究探测管径大小的方法。通过实验可以将管径标记好,进行多次实验得到大量数据,形成属性为信号强度、电流大小、管线埋深、管径大小的数据库。在训练网络时提取数据库中70%的数据进行BP 神经网络训练,30%的数据作为测试集进行验证,经过大量调试得到较好的网络。管线探测因素如表1 所示,按照以上方法将埋深以及磁场强度作为输入层,管径大小为输出层,得到人工神经网络(图2)。

表1 管线探测因素Tab.1 Pipeline detection factors
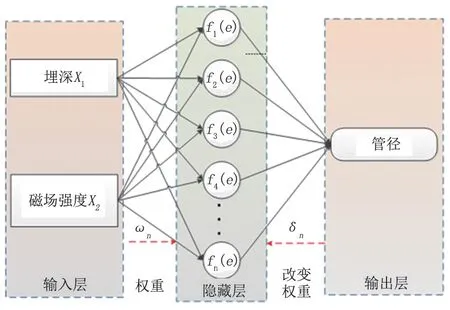
图2 人工神经网络Fig.2 Artificial neural networks
通过实验得到埋深、管径和场强等因素,用BP 神经网络训练和学习管道的各种因素,可以分别得到训练集、验证集、测试集以及整体的回归误差图,训练结果如图3 所示。
由图3 可知,训练集、验证集和测试集部分的R值分别为0.992 55、0.990 61 和0.999 98,其中R值越接近与1 其性能越好,因此得到的网络是较准确的。为了更直观地了解网络的准确性:首先,要保存上面训练好的网络。其次,导入一组输入值,用premnmx 函数进行归一化,然后用sim 函数调用训练好的网络得到输出值并进行反归一化,最终得到输出管径的预测值为178 mm,与实际管道半径(d=180 mm)相比,误差为1.1%。由此可以看出此种方法对于管径的预测具有较好的效果和一定的指导意义。
3 Mapping 定位及信息可视化
在对非金属管线定位过程中,需要将位置信息采集并上传,作为GIS 系统的备份记录。利用百度地图的开发工具,实现GPS 经纬度坐标到百度地图坐标的转换以及百度地图的调用。
通过配备GPS 模块与单板计算机进行定位采集数据,将数据存储于储存卡中,设置GPS 数据的传输模式,使用串口和上位机通信的GPS 模块,设定波特率等,可直接搭载上位机绘制界面,实现实时Mapping 定位。硬件连接,编译采集程序使之采集所得数据可以自动保存,随时调用。添加相关附件封装,如图4 所示。
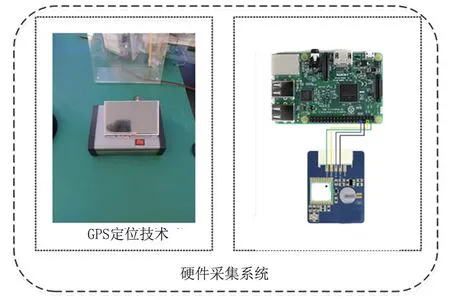
图4 硬件采集系统Fig.4 Hardware acquisition system
在计算位移时,记地球半径是R,这里以0°经线作为基准,那么根据地球表面任意两点的经纬度就可以计算出这两点间的地表距离。设第一点A的经纬度坐标为(LonA,LatA),第二点B 的经纬度坐标为(LonB,LatB),按照0°经线的基准,东经取经度的正值,西经取经度负值,北纬90-纬度值,南纬取90+纬度值,得到地表位置点(图5)。
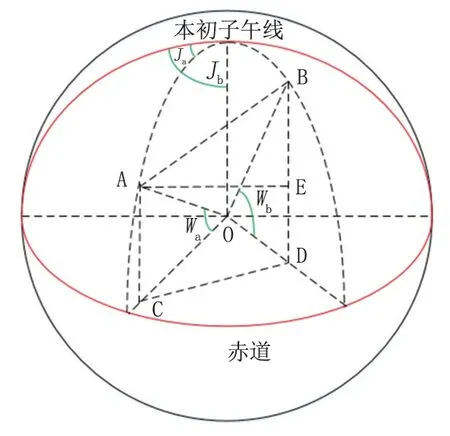
图5 地表位置点Fig.5 Ground location point
中国处于东半球、北半球,所以不对经度作处理,而对纬度作(90-Latitude)处理,因此进行简化,根据三角定理推导,可以得到计算两点距离的公式为
通过公式(4)可以获取管线长度等信息,根据采集计算得到的管线位置、管线长度、埋深以及管径大小等数据信息,通过软件开发工具进行程序编译,将相关信息实现可视化并打包为APP。APP可视化界面如图6 所示。
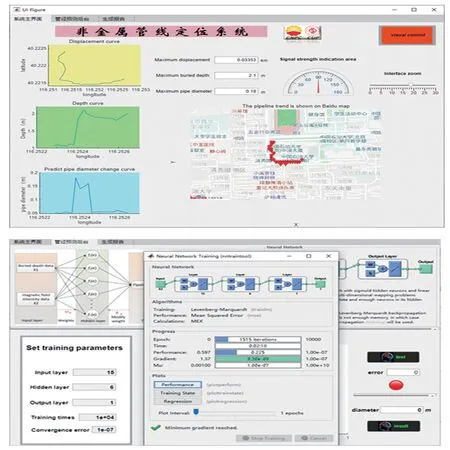
图6 APP 可视化界面Fig.6 APP visual interface
对于将所采位置数据可视化于APP 界面之中,需要百度地图开放平台密钥,进行百度地图API 接口连通。以上界面包括三个主菜单即主界面、管径后台预测、生成报告。主界面包括位置变化曲线图、管径变化曲线图、埋深变化曲线图、方向、百度地图mapping 定位可视化等信息;管径后台预测包括网络层的搭建(各层参数修改)、训练、检测与验证,以及后期的管径预测;报告生成包括链接到主界面的管线位置、埋深以及管径大小等数据信息,评价以文档形式表现并自动保存。
4 结论
在目前的工作中,提出了一种基于电磁法的非金属管道测绘预测及可视化方法,并通过理论分析以及实验验证了方法的可行性。
通过电磁法测量数据后,BP 神经网络可以实现较为有效、智能和方便预测管径。根据掩埋深度和场强等因素预测直径大小,结果精度在许用范围内,可以为实际工程管道检查提供思路和理论参考。这种管径预测方法不仅弥补了管道检测仪无法测量管径的缺点,而且智能方便。但是,仍然存在一些误差,将来需要添加更多数据库。管线数据可视化研究增加了硬件GPS 采集系统,同时将各管线必要数据传输到APP 可视化界面,在PC 端APP中一键生成管线关键信息文档,更加完善了管线资料系统。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
师道·教研(2022年1期)2022-03-12
煤气与热力(2021年7期)2021-08-23
建材发展导向(2021年11期)2021-07-28
海洋信息技术与应用(2020年1期)2020-06-11
传媒评论(2019年4期)2019-07-13
山东冶金(2019年2期)2019-05-11
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
原子与分子物理学报(2015年3期)2015-11-24