
基于安全会遇距离模型的智能船舶航行行为可靠性评估
2021-10-16 08:25:36朱天鹏姚玉南但家梭
中国修船 2021年5期
朱天鹏,姚玉南,但家梭,沈 轩,杨 帆
(1.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;2.中国船级社 江苏分社,江苏 南京 210000)
随着网络技术和信息技术的广泛应用,船舶智能化水平快速提升,船舶向高效、智能、多用途的方向发展[1-3]。但由于当前技术的限制,智能船舶的可靠性和安全性仍无法得到保证,人们对智能船舶的可靠性和各个关键系统的安全性也存有疑虑。
针对船舶避碰问题,国内外学者已做了大量研究。王德龙等[4]针对船舶的避碰操纵评估,提出了一种基于船舶操纵模拟器的自动化评估系统,实现了对船舶避碰操纵的自动评估。孙峰等[5]将船舶智能避碰策略系统作为研究对象,对两船之间的关系进行定性和定量分析,建立了智能避碰策略测试评价指标体系。Rafal[6]对船舶分道通航制水域的船舶避碰情况做了深入分析,提出在某些场景下船舶转向并不是最好的避碰行为,必要情况下需采取降速达到避碰效果。Son N S等[7]针对无人驾驶船舶ARAGON的海上避碰系统,在实际海域进行了多障碍物迎面、交叉、追越等复杂碰撞情况下的现场试验。
区别于传统人工操纵的船舶航行行为可靠性评估模型[8],智能船舶航行行为主要受到船舶各系统的共同影响。随着系统的综合化、集成化,系统的功能逻辑、架构设计等越来越复杂,是一个具有动态重构特性、故障时序相关、逻辑相关的复杂系统,传统的针对软、硬件的可靠性分析方法使得工作量变大,也更加难以全面、准确地对智能船舶进行可靠性分析和评估。因此对处于会遇场景中的智能船舶航行行为的可靠性进行研究是必要的,对提高会遇场景中智能船舶的安全性和减少水上交通事故具有重要意义。
1 会遇场景智能船舶航行行为分析
智能船舶的航行行为主要分为3个阶段——环境信息感知、状态判断决策和操作响应,故智能船舶的航行行为指智能船舶在对周围环境进行感知并进行分析决策后,利用自身控制系统所做出的一系列航行活动。在当前的技术条件下,为保证安全航行,智能船舶仍需处于人工监控的状态下,出现船舶不可处理的情况时,需人工介入对其进行操作并校正,因此,本文所说智能船舶指配有船员的、可以实现自主航行的船舶。
智能船舶在两船会遇的航行过程中,两船的位置关系主要通过航向交叉角(θTCA)和舷角(θRB)来表示,具体如图1所示。根据《1972年国际海上避碰规则》,由两船位置所形成的舷角大小,将船舶会遇场景分为对遇、交叉会遇和追越3类,船舶会遇场景划分如图2所示。
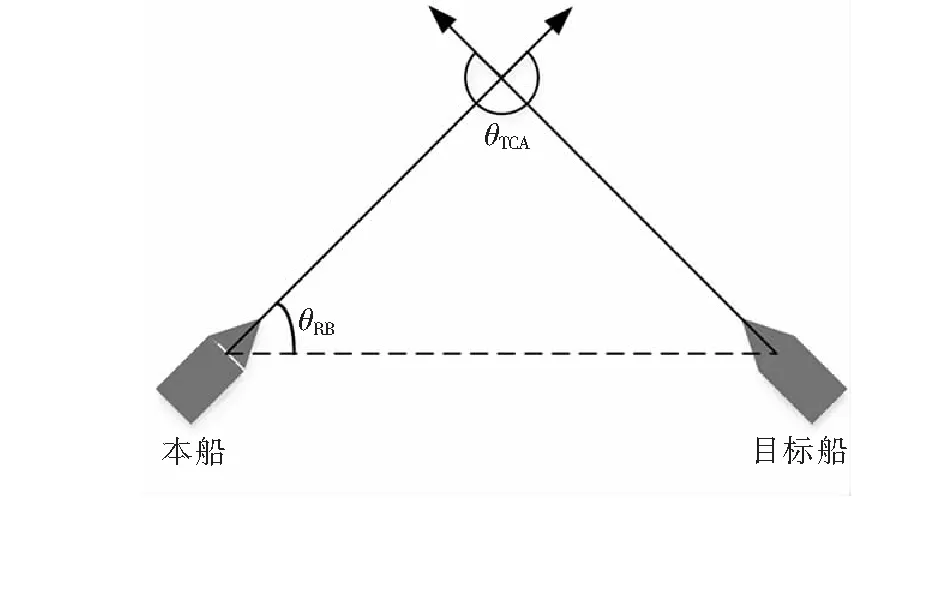
图1 两船会遇场景中航向交叉角和舷角示意图
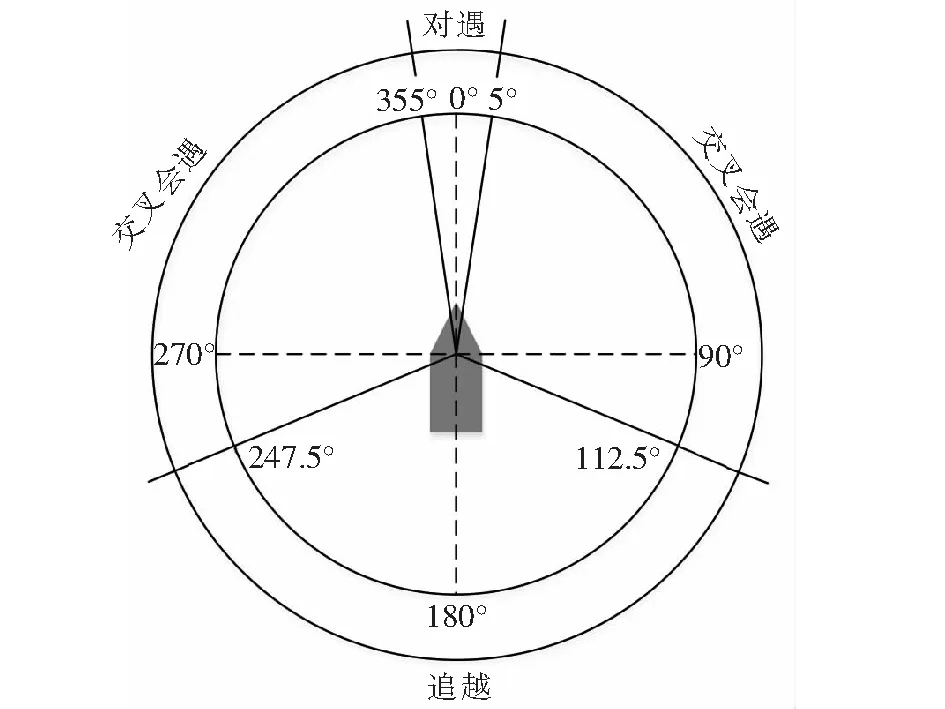
图2 船舶会遇场景划分
1.1 对遇场景
在对遇场景中,本船与目标船舶所形成舷角应满足θRB≤5°,航向交叉角满足条件175°≤θTCA≤185°。在对遇场景中,本船与目标船互为让路船,两船均应根据当时的情况,各自采取避让行为,避免碰撞,应各自向右转向进行避让,从另一船的左舷驶过。
1.2 交叉会遇场景
当本船与目标船所形成舷角满足5.0°≤θRB<112.5°或247.5°≤θRB<355.0°时,构成交叉会遇局面。当目标船与本船形成舷角满足条件5.0°≤θRB<67.5°时,本船为让路船,目标船为直航船,本船应向右转向进行避让。当目标船与本船形成舷角满足条件67.5°≤θRB<112.5°时,本船为让路船,当目标船与本船船速比r≤0.95时,应左转避让,当目标船与本船速度比r>0.95时,应右转避让[9]。当目标船与本船形成舷角满足247.5°≤θRB<355.0°时,本船为直航船,保向保速航行,只有在即将形成紧迫局面,并且目标船仍未采取任何避让行动时,本船应右转避让。
1.3 追越场景
当本船与目标船所形成舷角满足112.5°≤θRB<247.5°时,构成追越局面。当目标船位于本船的相对方位112.5°≤θRB<247.5°内且航速高于本船时,构成目标船追越本船会遇场景,此时,本船应保速保向航行,只有在本船判断可能发生碰撞时,本船才要根据当时情况,采取相应的右(左)转避让行动;当本船位于目标船的相对方位112.5°≤θRB<247.5°内且航速高于目标船时,构成本船追越目标船场景,此时,本船应左转并加速越过目标船。
2 会遇场景智能船舶航行行为故障分析
2.1 安全会遇距离模型
英国学者E.M.Goodwin提出了船舶领域与本船目标船所形成的舷角之间的关系,但由于Goodwin所提出的船舶领域偏大,研究者将其进行了修订,使之更加合理、更加符合实际,修订后的公式如下:
dSDA=
(1)
式中,dSDA为安全会遇距离,n mile;α为目标船方位,(°)。
2.2 会遇场景中智能船舶航行行为故障判定
确定智能船舶在会遇场景中的具体航行行为故障,是进行会遇场景中智能船舶航行行为可靠性评估的重要环节。基于《1972年国际海上避碰规则》中对船舶避碰行为的要求,得出智能船舶在会遇场景中的航行行为故障及其航行参数类型见表1。

表1 会遇场景中的航行行为故障及其航行参数类型
3 航行行为可靠性评估模型
3.1 可靠性评估指标
智能船舶作为一个复杂系统,由感知系统、决策系统以及执行系统等组成,可靠性影响因素较多,考虑现有技术的发展以及评估方法的简便性和有效性,制定智能船舶航行行为可靠性评估指标,如表2所示。其中,“校正”不仅指对船舶软、硬件的维修,还包括在智能船舶出现行为故障后,为保证船舶安全,船舶驾驶员需介入、接管并进行船舶操纵。

表2 智能船舶航行行为可靠性评估指标
3.2 可靠性评估指标的计算方法
1)平均无故障航行时间TMTBF,即智能船舶在2次航行行为故障之间的平均运行时间:
TMTBF=T/r,
(2)
式中,T为所记录的智能船舶的航行时长;r为智能船舶在智能航行状态下出现避碰航行行为故障的总次数。
2)平均无故障航行里程MMMBF,即智能船舶在两次避碰航行行为故障之间的平均航行里程。已知所记录的智能船舶航行里程数为M,则:
MMMBF=M/r。
(3)
3)可靠度R。可靠度R为智能船舶在2次避碰航行行为故障之间的航行无故障概率。智能船舶是一复杂的可维修系统,系统中任一环节发生故障,智能船舶都不能维持其正常功能,可以将其视为串联系统,其故障时间分布趋于指数分布,可靠度函数表示为以下2种形式:
R(x)=exp[-x/MMMBF],
(4)
R(t)=exp[-t/TMTBF],
(5)
式中,x为故障间隔航行里程数的随机变量;t为故障间隔航行时间的随机变量。
4)故障率λ。λ为智能船舶在规定的条件下和规定的时间内,故障次数与智能船舶寿命单位总数之比。当故障时间分布为指数分布时,可以表示为平均无故障航行时间或里程的倒数,即为λ=1/TMTBF或λ=1/MMMBF。
5)平均校正时间TMTTR,即智能船舶n次校正的平均校正时间,表示为:
TMTTR=Ts/n,
(6)
式中,Ts为智能船舶的校正总时长;n为校正的次数。
6)校正率μ。μ为智能船舶在规定的条件下和规定的时间内,在任一规定的校正级别上被校正的次数与在此级别上校正总时间之比。当校正时间分布为指数分布时,可以表示为平均校正时间的倒数,即μ=1/TMTTR。
7)有效度A。A为智能船舶在规定条件下航行时,在任何时间点维持其正常航行功能的概率。表示为:
(7)
当故障时间分布和校正时间分布均为指数分布时:
(8)
4 仿真模拟试验
4.1 仿真模拟平台与试验工况
为验证所构建可靠性评估模型的合理性,本文利用开发型船舶驾驶模拟器,模拟智能船舶在会遇场景中的航行过程。在两船会遇场景中,假定航行自然环境为:无风、水流为静止状态、水域开阔、能见度良好。会遇场景中两船具体航行参数如表3所示,其中v表示船舶航速。

表3 会遇场景中两船具体航行参数设置
基于表3所设场景航行参数,共16种航行场景,在模拟器中随机构建会遇场景,除本船做避让行为外,其他航行情况下本船航行速度始终保持在10 kn。场景设置完成后,将自动规划航行轨迹,并进行模拟航行。
4.2 数据采集
通过船舶驾驶模拟器,模拟智能船舶在会遇场景中的避碰行为,共进行3次模拟,模拟航行里程达480 n mile,总时间为44.5 h。对所得模拟试验数据进行记录,最终得出会遇场景智能船舶航行行为仿真模拟试验数据如表4所示。
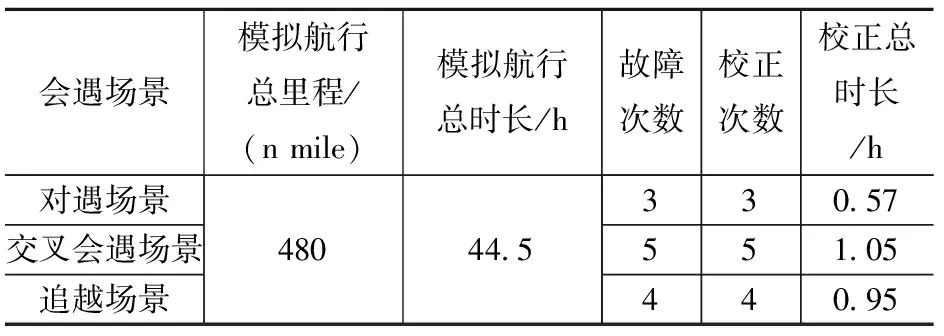
表4 会遇场景智能船舶航行行为仿真模拟试验数据
5 可靠性评估结果
5.1 可靠性指标对比
基于表4中的数据,计算得到智能船舶会遇场景智能航行行为各可靠性指标值,如表5所示,会遇场景智能航行行为可靠度见图3。
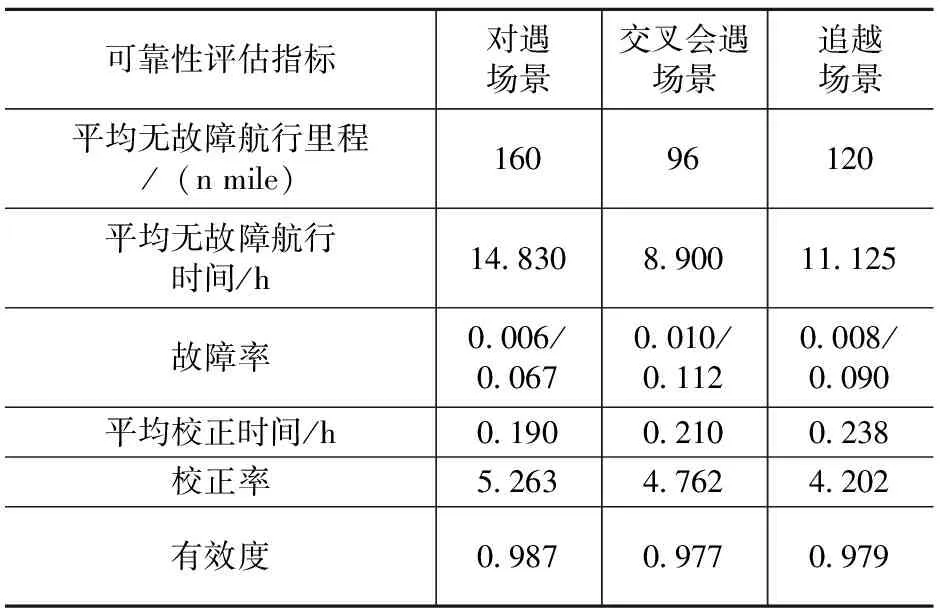
表5 会遇场景智能航行行为各可靠性指标值

图3 会遇场景智能航行行为可靠度
由表5及图3可知,在480 n mile的模拟航行过程当中,交叉会遇航行场景中智能船舶航行行为可靠度始终低于对遇和追越航行场景的行为可靠度;在3种会遇场景中,智能船舶航行行为可靠度从高到低依次为对遇、追越和交叉会遇。
5.2 评估结果分析
通过上述会遇场景智能船舶航行行为可靠性评估结果分析,得出交叉会遇场景智能船舶航行行为可靠性低于对遇和追越场景智能船舶航行行为可靠性的结论。航行场景越复杂,智能船舶航行行为可靠性越低,符合实际,表明所提出的可靠性评估指标能够反映智能船舶在会遇场景中的航行可靠性水平,所建立的基于安全会遇距离模型的会遇场景智能船舶航行行为可靠性评估方法能够有效、快速地对智能船舶航行行为进行可靠性评估。但由于数据是由船舶驾驶模拟器模拟仿真得到,较于实际船舶航行场景,其评估结果过于理想化。
首先,模拟器仿真环境下,由于会遇场景是人为设置的,较于实际海上航行,其会遇场景密度大,航程较短,所得评估结果与实际有所偏差。在实际航行环境中,不考虑船舶设备维修等因素的条件下,智能船舶无故障航行里程和航行时间更高。
其次,在船舶驾驶模拟器仿真环境下,智能船舶避碰行为只受驾驶模拟器避碰算法的影响,由图3知。可靠度曲线下降的影响只受避碰算法的影响,而智能船舶在实际航行过程当中,其航行行为可靠度不仅受算法的影响,还受船舶航行环境以及智能船舶自身设备的影响,如能见度不良导致避让时机缩短、主机输出功率不足导致无法快速响应、舵系统故障导致船舶转向出现偏差等,都将导致智能船舶航行行为可靠性的降低,因此实际航行过程中智能船舶航行行为可靠度曲线相较于仿真所得曲线,其斜率更高,下降更明显。
6 结束语
本文针对智能船舶可靠性评估方法相关研究较少、智能船舶航行系统复杂、进行可靠性评估工作量大的问题,提出基于安全会遇距离模型的智能船舶航行行为可靠性评估方法。基于对船舶会遇场景的分析,构建可靠性评估指标,建立评估模型,利用开发型船舶驾驶模拟器,验证所建立模型的可行性。通过对试验结果的分析,表明该可靠性评估方法能够有效、快速地对智能船舶航行行为进行可靠性评估,能够为智能船舶的可靠性分析提供支持,具有很强的工程实用性,同时通过分析其不足,提出未来对模型进行改进的措施和研究方向。
猜你喜欢
集美大学学报(自然科学版)(2022年4期)2022-09-04 03:13:02
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
舰船科学技术(2021年5期)2021-07-03 07:20:48
中国航海(2021年1期)2021-03-10 13:31:32
武汉理工大学学报(交通科学与工程版)(2020年3期)2020-07-27 06:46:00
上海海事大学学报(2018年1期)2018-04-30 05:15:32
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
中国航海(2015年3期)2015-11-29 01:02:53
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07 11:22:58
