
多微网最优潮流功率调度及协同优化控制策略
2021-10-12 08:26周林吕智林
现代电力 2021年5期
周林,吕智林
(广西大学电气工程学院,广西壮族自治区 南宁市 530004)
0 引言
在微网(microgrids, MG)的研究中,下垂控制是一种常用的方法,但传统下垂控制是一种有差控制,所以补偿下垂所带来的偏差是一个重要的研究内容,大量的研究人员对微电网的分布式二次控制进行了研究。文献[1]提出了一种多智能体分布式协同控制方案来恢复微电网的频率和电压。文献[2-4]对文献[1]的方法进行了改进,通过用有限时间分布式二次控制代替分布式协作控制来实现加速收敛并确保改进的动态性能。文献[5-6]利用模糊控制器来更改下垂控制中的下垂系数,使之能够根据系统自适应调节大小,并且能够恢复电压以及频率到额定值。但是由于模糊控制器的模糊规则需要设计者按经验来设计,所以在实验中不易实现。除此之外,对功率的分配也是微电网中研究的热点。文献[7]提出了反下垂控制,结合自适应虚拟电阻,提高系统的有功功率分配精度以及电能质量;文献[8-10]引入自适应虚拟电阻的概念,利用微网运行中的功率输出设计出自适应大小的虚拟电阻,来补偿线路上的阻抗不匹配现象,实现有功以及无功按照预定比例分配。但是文献[8-10]只考虑了功率分配,对于频率以及电压下降没有考虑。文献[11-13]通过分层控制,不仅完成了对功率的精准分配,还将频率和电压补偿到额定值。
以上文献大多仅考虑单个微电网的情况,而微电网的稳定性受到了很多因素的影响。其中,系统容量问题一直是微电网的软肋。因此,将多个微电网结合,形成微网群,利用微网群之间的调度来解决单个微电网的容量问题是一个有效途径。目前对微网群的研究并没有微电网那么成熟,研究的方向主要集中在微网群的多级代理控制。文献[14-17]提出了多微网协同控制,通过设置牵制点传递不同微网之间的信息做到多微网之间功率的互济。但是这种方法非常依赖牵制点,并且在该方法下,只要负载存在,微网群之间的通信是时刻存在的,所以系统所要承担的通信压力非常大。文献[18]对微网群间的能量调度进行了研究,建立微网调节成本模型,降低发电成本。但是该文献并没有考虑到微网中的具体控制。
考虑到上述的情况,本文提出一种多微网最优潮流功率调度及协同优化控制策略,在多微网控制的基础上加入最优潮流对其进行功率调度,考虑子微网控制的同时,在微网间需要进行能量互济时启用最优潮流算法,使各子微网的发电机容量能够满足微网需求。相比于其他方法,所提出的方法有以下几项优点:1)对分布式电源(distributed generator, DG)的功率分配进行了优化,有功功率不再按照下垂系数进行分配,而是利用等成本微增率算法,以成本最小作为优化目标,降低了微网的发电成本;2)在对功率进行优化的同时,也可以将频率恢复到额定值,并且没有增加额外的控制器,大大减轻了系统的负担;3)传统下垂中电压因为线路阻抗的原因不能达成一致,本文针对这一问题设计了电压控制器,将电压维持在额定值上,保证了电能质量;4)当某个微网的发电机组容量不能满足该微网需求时,将调用最优潮流算法,对多微网之间进行功率互济,保证多微网正常运行。
1 微电网控制策略
1.1 微电网通信图论
微网中,为了达到控制目的,需要设计出能够符合微网的通信拓扑图,它可以与实际的物理拓扑图不相同。而通信可以使控制变量能够达成全局一致。在交流微电网中,可以用无向图ℊ=(V,E,A)来表示网络中的通信,其中,符号V={1,2, ···,n}表示图中的各顶点,将其抽象成各个分布式发电单元;E={(i,j)∈V×V}表示分布式单元之间所组成的边集,用其代表通信连接;A=(aij)n×n定义为邻接矩阵,邻接矩阵表示节点i和节点j之间的通信状态。当且仅当(Vi,Vj)∈E时,aij>0,表示分布式电源i和分布式电源j之间存在信息交换,反之,则aij=0。在图论中,拉普拉斯矩阵可以表示为L=D−A,D=diag(d1,d2, ···,dn)表示入度矩阵。
1.2 传统下垂控制
下垂控制法因为其响应速度较快,所以常被用来作为分层控制的第1级控制层,传统的下垂控制可以表示为
式 中: ωi和Vi分别为第i(i=1,2,···,n)个逆 变 器所发出的频率和电压;mi和ni分 别为第i个DG所对应P−f和Q−V下垂系数;和分别为有功以及无功的参考值;Pi和Qi分别为逆变器发出并且经过低通滤波器后的有功和无功,其可表示如下
式中: ωc是低通滤波器的截止频率。
1.3 等成本微增率功率分配策略
在式(1)所表示的下垂控制中,一般能够实现有功功率的按比例分配。但是,这种分配策略往往没有考虑到成本因素,从而使得发电机不能运行在最优的状态。因此,本节提出一种等成本微增率功率分配策略,并且在此基础上衍生出有功动态参考值。
微电网的发电单元包括光伏发电、风力发电以及燃气轮机等。微电网总的发电成本包括燃料消耗、发电损耗以及维护等。对第i个发电单元建立成本函数
式中: αi、βi、γi表示第i个发电单元的成本系数;Ci表示第i个发电单元所产生的成本;Pi表示第i个发电单元输出的有功功率。
当系统达到稳态时,系统需要满足各项平衡约束条件,例如发电单元发出的功率与负载功率之间的平衡约束、以及发电机发电最大上限以及最小下限约束
式中:Pload表示总的负载所需功率;Pmin,i、Pmax,i分别表示第i个发电单元发出功率的下限和上限。
根据式(3)—(5),可以利用拉格朗日乘数法对其进行构造拉格朗日函数
式中:λ代表等成本微增率,当以下条件存在时,优化方案则能够实现:

由式(7)可得等微增率

由式(8)可以看出,各DG的出力Pi和等微增率 λi之间为一次线性关系,根据式(8)可以反推出各DG出力情况:

因此,DG的约束条件变更为


因此,式(1)可改写为

通过等微增率反推求出各个分布式电源的参考功率后,下垂控制器根据参考有功功率进行实时功率追踪,这样就可以实现功率优化。
在传统的下垂控制中,为了恢复频率到额定值,需要加入测量反馈机制。这种测量反馈机制会大幅影响系统的响应速度,并且在有干扰的情况下会产生比较大的频率偏差。但在本文所提出的等微增率优化策略中,当实际输出的功率能够完全跟踪动态有功参考值,也就是则有 ωi=ω∗,那么频率优化也会实现。相比于传统下垂控制,本文所提出的功率优化策略,在实现功率优化的同时,也能将频率恢复到额定值,并且不需要对频率进行额外的控制,减轻了系统负担。
1.4 电压恢复策略
与频率不同,在交流微电网中,下垂控制由于受到线路阻抗不匹配的影响,各个分布式电源的电压不能收敛为同一个值,为了能够补偿各个分布式电源的电压不相等以及由下垂特性所引起的压降,在下垂控制中设置一个补偿策略
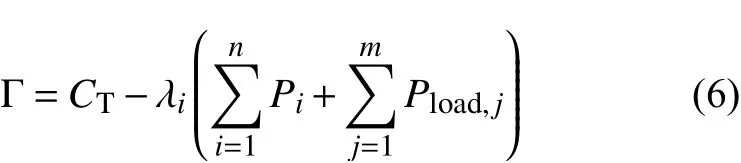
式中:Vi和Vj分别表示第i个DG和第j个DG的电压; Δvi为 电压的补偿因子;µ 和 ε表示耦合权重,影响其收敛的速度;aij表示DGi与DGj之间邻接矩阵A的元素;bi表示DGi的电压与电压参考值V∗之间邻接矩阵B的元素,若bi=0,则表示Vi与V∗之间没有通信,若bi>0则表示存在通信。综合以上设计,系统总的控制如图1所示。
图1 交流微电网分布式电源控制Fig. 1 Distributed power control of AC microgrid
2 基于最优潮流的多微网能量互济
在多节点系统运行过程中,由发电节点向负荷节点供电,以网损最小为目标函数的数学模型如下
式中:Ploss,i、Pall,loss分别表示第i个节点的网损以及总的网损;表示第i个发电单元所发出的功率以及负载。具体的节点潮流方程以及利用二阶锥松弛技术求解的详细过程见文献[19]。
多个微电网互联形成微网群,本文将每个子电网抽象成多节点系统中的一个节点。当有子微网的负载大于该子微网最大出力值时,则此子微网可看作一个负载节点,将超出该子微网负载能力之外的负荷作为该负载节点的负载值,而其他还有剩余出力的子微网可作为一个发电节点,利用最优潮流对多微网间的功率进行重新分配,可解决这些子微网功率供给不足的问题。
为了说明该策略的有效性,将含有4个子微网的微网群看作一个IEEE4节点系统,将每个子微网都作为一个节点,拓扑结构如图2所示。
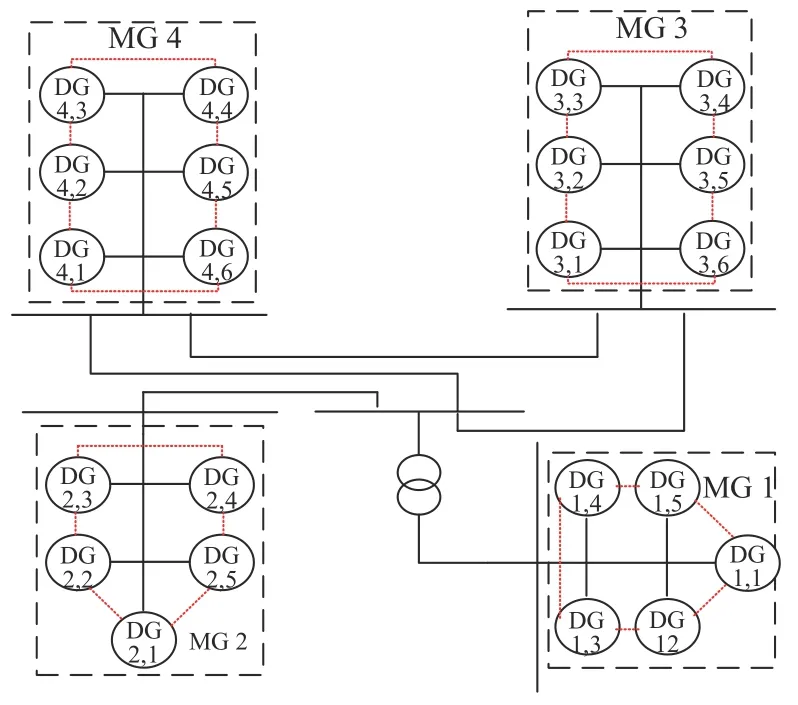
图2 IEEE4节点拓扑图Fig. 2 IEEE4 node topology diagram
在微网群系统中,各个节点都是一个可独立运行的智能体,IEEE4节点线路参数参考标准数据。在满足各自的负荷时,微网群内部的各子微网独自运行,不与其他子微网发生能量互济。当子微网不能满足负荷需求时,各子微网通过发送信号到上层管理中心,管理中心根据子微网的负荷状态,将功率供给不足的子微网作为负荷节点,向其他子微网购电;将有剩余发电容量的子微网作为发电节点。通过计算最优潮流,解决某些子微网发电容量不足问题。图3为系统运行流程图。
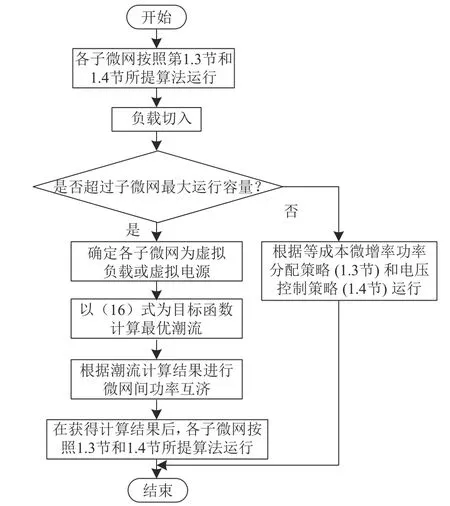
图3 基于最优潮流的多微网系统能量互济运行流程图Fig. 3 Flowchart of optimal power flow-based mutual aid of energy among multi-microgrid system
3 稳定性分析
本节将对以上所提出的控制器进行稳定性分析,验证系统的可行性。首先,假设在t≥t0时,微网系统运行在稳态。由式(13)可得

式中:矩阵 ω=[ω1,ω2,···,ωn]T为 输出频率;ω∗=表示一个行数为n的全1列向量;矩阵M=[m1,m2,···,mn]T表示下垂系数;T(·)=ℜN×1→ℜN×N,表示将一个列向量转换成为对角矩阵;矩阵P=[P1,P2,···,Pn]T为 输出功率;矩阵为 平 均 微 增 率;矩 阵和为发电机系数。根据式(18),可得:

式中:eω=ω−ω∗;对于矩阵P,根据式(9),将式(19)变换为:
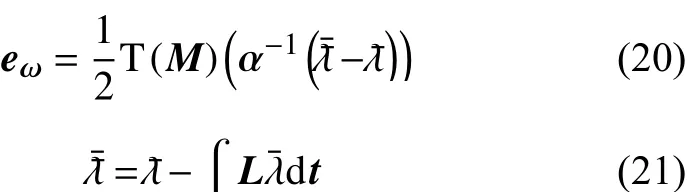

由式(22)可以看出,当各个分布式电源的等微增率都收敛到一致时,也就有,则上述的积分项,那么式(22)中的误差项eω=0,这表明系统输出的频率和额定频率之间不存在误差,达到设定的目标。
对于电压控制器,可以应用李雅普诺夫来证明控制器的稳定性能。电压的恢复因子由式(15)决定,为了证明系统中所考虑的控制输入稳定性,定义误差变量为:

由李雅普诺夫稳定性准则可知,需要根据现实情况选择一个合适的李雅普诺夫函数,若该函数在初始状态下是正定的,并且在求导后,该函数是负定的,那么就表明该系统可以收敛,是渐进稳定的。根据以上准则,在本文中设置李雅普诺夫函数为:

由上式可知,在ev≠0的情况下,函数V是恒大于0的,对式(24)进行求导:

将向量evi代入到式(15)所表示的动力学方程中,可以表示成:

将式(26)代入到式(25)中:

根据不等式性质,可将上式做如下变换:
根据数学定义,L+B是正定的,这就使得永远都是小于等于零的。综合以上所述,根据李雅普诺夫的稳定性质可知,系统的误差可以收敛到零,系统稳定。
4 算例分析
在日常生活中,微网的负载是时刻变化的,并且在用电高峰期时可能变化更大,如图4所示。
在图4中,可以看到一天的用电高峰期在每天的18:00—21:00,在这期间内,MG1和MG2负荷大幅增加,这样就可能导致该子微网内的负荷超出了子微网的容量,而由于各个子微网的容量有所差异,如表1所示,MG3和MG4的子微网却有剩余容量。这样就可以将MG1和MG2看作为负载节点,而MG3和MG4看作为发电机节点向MG1和MG2供电。由于MG1和MG2都作为负载节点,为了不重复叙述,选择其中一个来展示微网运行情况即可。同理,可选择MG3和MG4其中一个来展示发电机节点在经过潮流运算后的运行情况。
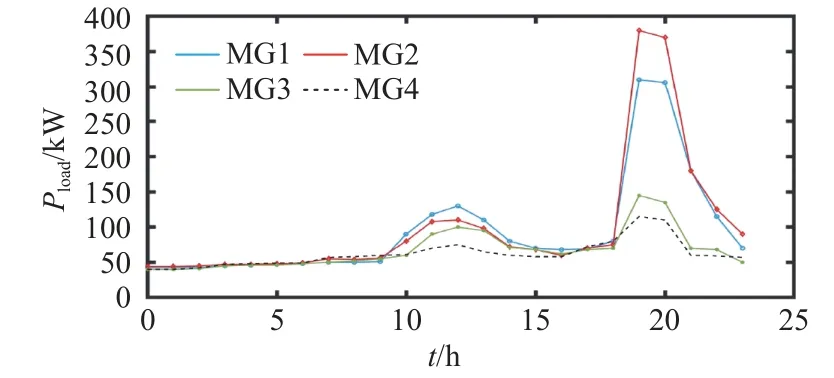
图4 各子微网24 h负载变化Fig. 4 Load variation of sub-microgrids within 24 hours
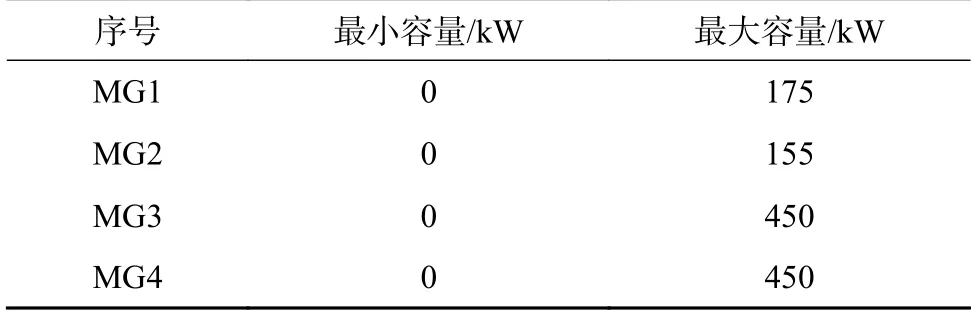
表1 发电机容量Table 1 Generator capacities
4.1 性能比较
本小节将所提及的多微网能量调度与控制策略与不加任何算法的传统下垂控制在MATLAB/SIMULINK平台进行模拟运行。子微网结构如图5所示,其中发电机参数如附表A1所示。MG2和MG3的线路阻抗大小、负荷以及其他参数在附表A2中列出,其他微网参数在附表A3中列出。
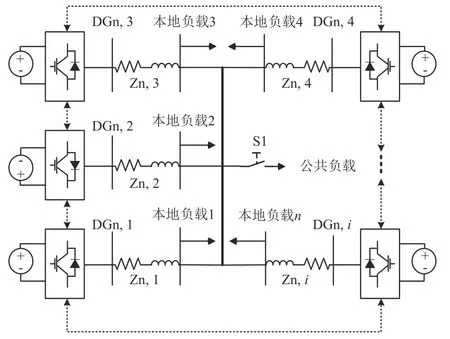
图5 子微网案例结构Fig. 5 Case structure of sub-microgrid
本节实验模拟图4中18:00—19:00时间段内,电网负荷突然增大的情况下,分析传统下垂控制和本文所提出的能量调度与控制策略的影响。图6所示为传统下垂控制在此时间段内的运行变化。而对于本文所提出的算法,在18:00—19:00时间段内,结合图4以及表1可得多微网各节点运行情况如表2所示。
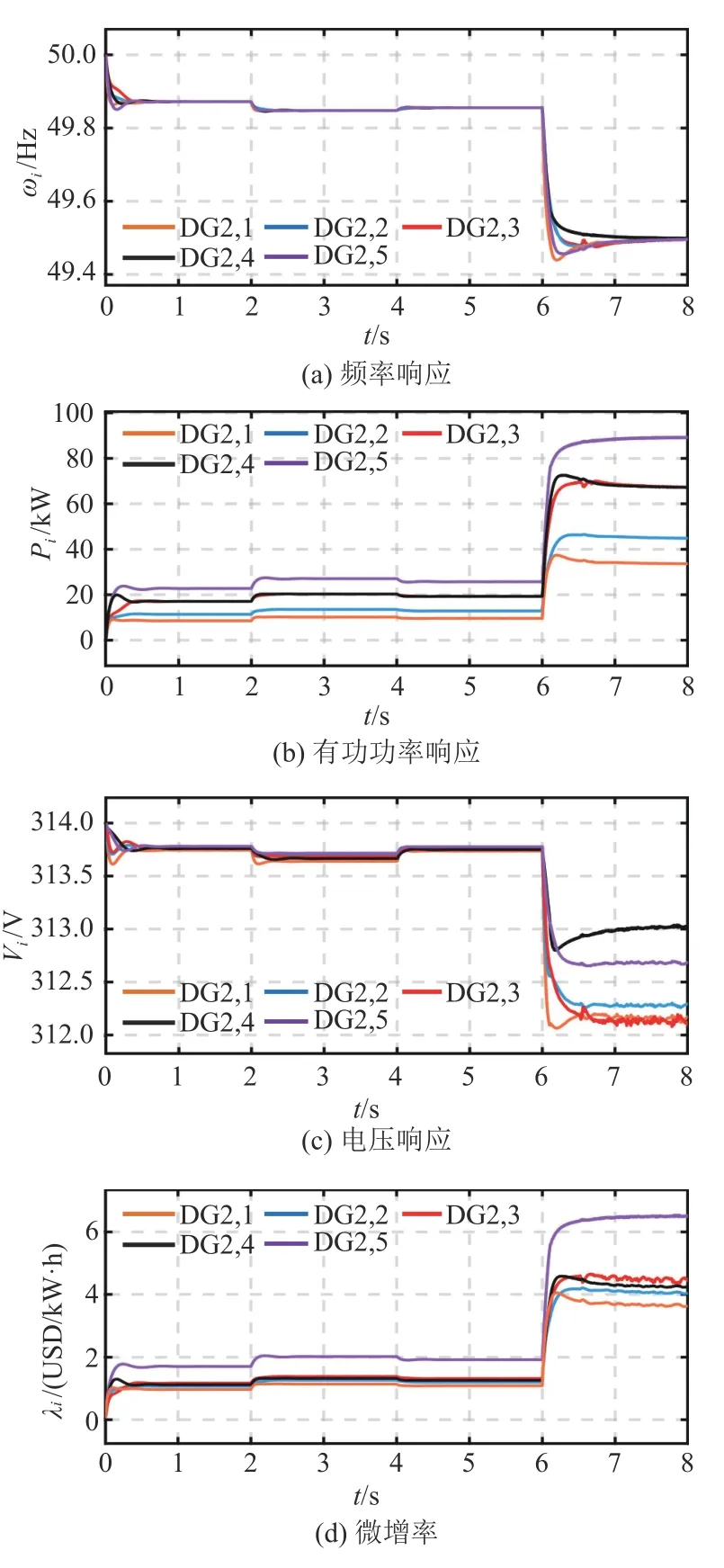
图6 传统下垂控制运行情况Fig. 6 Operation situation of traditional droop control
得到了表2所示的节点运行状态后,各MG将此信息传递给上层,随后上层的最优潮流根据此信息进行计算,重新合理分配节点功率。计算结果如表3所示。
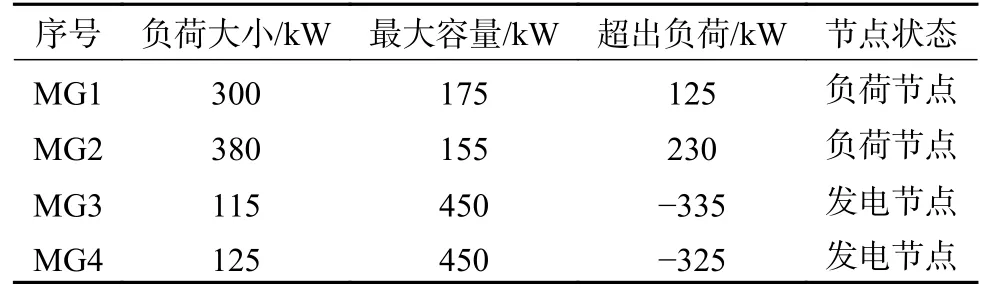
表2 各子微网负荷及运行情况Table 2 Load of each sub-microgrid and operation situations
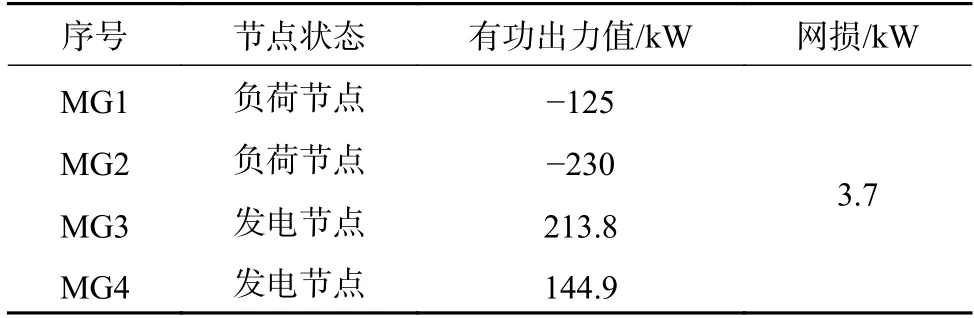
表3 最优潮流运算结果Table 3 Calculation result of optimal power flows
经过潮流计算后,超出MG1和MG2发电容量外的负荷由有剩余发电容量的MG3和MG4共同为其分担。其中,MG2和MG3的运行情况如图7和图8所示。
当t=2 s时,在传统下垂控制中投入大小与LOAD2,2一样的小负载,在MG2和MG3中分别投入LOAD2,2和LOAD3,1来模拟用电量逐渐增加,然后在t=4 s时,切除传统下垂控制中大小与LOAD2,1一样负荷以及MG2中的LOAD2,1来表示一些用户停止用电。随着高峰期的来临,当t=6 s时,在下垂控制和MG2中投入负荷LOAD2,3来表示微网用电量突然大大增加。
当t=2 s加入小负载时,图6所示的传统下垂控制的频率和电压与额定值存在偏差,并且当投入的负载越大时,偏差也随即增大。而本文所提出的算法运行后如图7和图8所示,同样在t=2 s时有小负载投入时,由于加入了动态有功参考值以及电压补偿机制,所以当电网的负荷产生波动时,图7(b)和图8(b)所示的有功输出分别能够跟随图7(e)和图8(e)所示的动态有功参考值,使得频率能够保持在额定值。电压因为存在补偿机制,所以也能够恢复到额定值,保证了电能质量。
当t=6 s微网用电量突然大幅提升时,由于负载过大,传统下垂控制的频率跌落过大,如图6(a)所示。频率低于49.8 Hz的可接受值,所以其不能为负荷提供正常的供电。但是在本文提出的能量调度算法中,由于存在能量调度方案,当某个微网的所需功率超过其发电机的最大容量时,启用微网群之间的能量调度策略,将超出该子微网发电容量的部分负荷通过能量调度方案,让其他子微网共同为其供电。如图7(b)所示的MG2的输出功率在t=6 s时已经达到了该发电机组的最大输出功率,但是该子微网内还有部分负荷没有得到供电,因此能量调度方案开始运行。而MG3在t=6 s时,如图8(b)所示,由于应用了微网间能量调度方案,所以需要为其他子微网的负荷供电。同时子微网内的协同控制策略使得该子微网的频率以及电压保持在额定值,保证其电能质量,使得负荷得到正常供电。
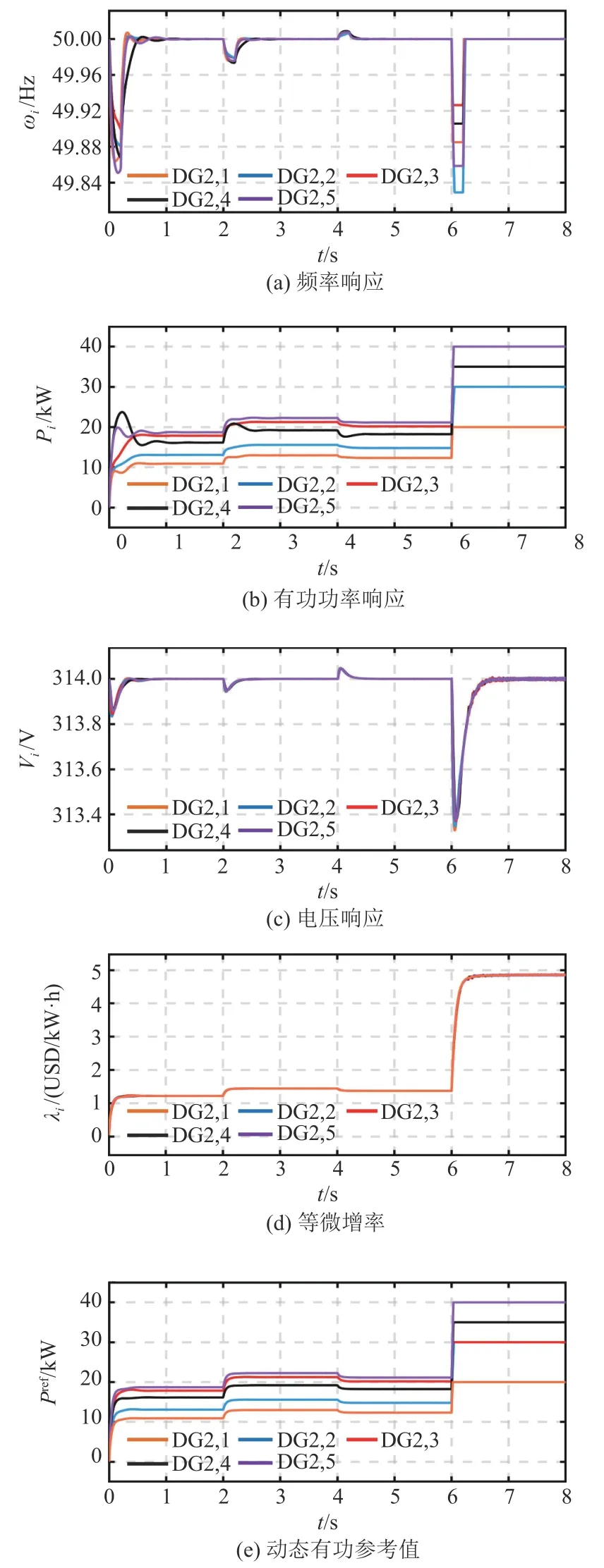
图7 MG2功率调度及协同优化算法运行情况Fig. 7 Power scheduling of microgrid No. 2 and operation situation of collaborative optimization algorithm
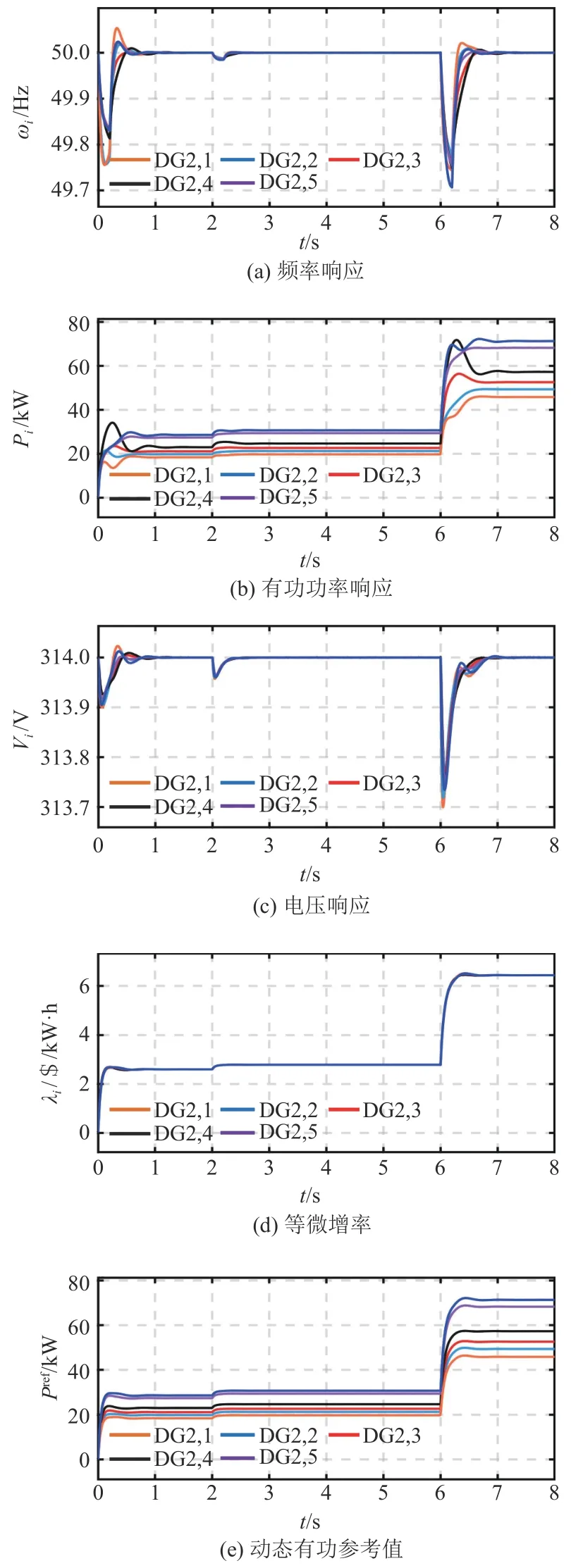
图8 MG3功率调度及协同优化算法运行情况Fig. 8 Power scheduling of microgrid No. 3 and operation situation of collaborative optimization algorithm
在传统下垂控制中,输出有功功率是按照下垂系数来分配的,各DG的微增率并没有达到一致,如图6(d)所示,这就使得微网不能运行在最经济的状态下。而本文提出的能量调度和协同优化控制策略,由于使用了一致性算法,将所有DG的成本微增率变成了一致,如图7(d)所示。这就保证了各个发电机组根据自身发电能力,在最节省成本的情况下运行,而不是依据下垂系数分配功率,如图7(b)所示。为了更直观表现成本优化前和优化后的不同,图9给出了MG2在相同负载投切情况下,不加任何算法的传统下垂控制和采用本文所提的协同优化控制后的成本对比,可从图中看出,采用了协同优化算法后的微网,成本低于传统下垂控制。
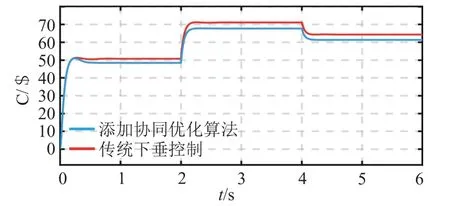
图9 MG2不加算法与加入协同优化算法成本对比Fig. 9 Cost comparison of microgrid No. 2 with and without collaborative optimization algorithm
4.2 微网即插即用
图10中展示了微网在有电源拔出以及插入情况下的各个性能参数的波形图。测试中,DG2,3以及它与其他逆变器之间的通信线路在运行中从微网中断离,并在一段时间后重新连接到微网,如图10(a)所示。
如图10(b)和图(d)所示,当DG2,3在t=2 s与微网断开连接时,频率和电压仍然维持在额定值。图10(c)所示的输出有功功率以及图10(f)动态有功参考值,在DG2,3断开时,由于微网的发电单元减少,其他电源的输出功率相应增加,而DG2,3只给自己的本地负载提供功率支撑,并且如图10(e)所示,由于3号电源脱离微网,其不与其他DG通信,所以其等微增率和电压不参与同步,但是由于所提出的一致性等微增率和电压恢复算法中DG是分散控制的,各DG可根据自身通信情况继续运行,所以DG2,3虽然不能和其他电源进行通信,进行功率经济分配,但是其仍然可以作为一个独立的电源发电,跟踪有功动态参考值,实现频率以及电压恢复。在DG2,3重新连接后,经过短时间的动态调节,系统重新回归到初始状态,整个过程中,系统的输出有功功率正常跟随动态有功参考值。
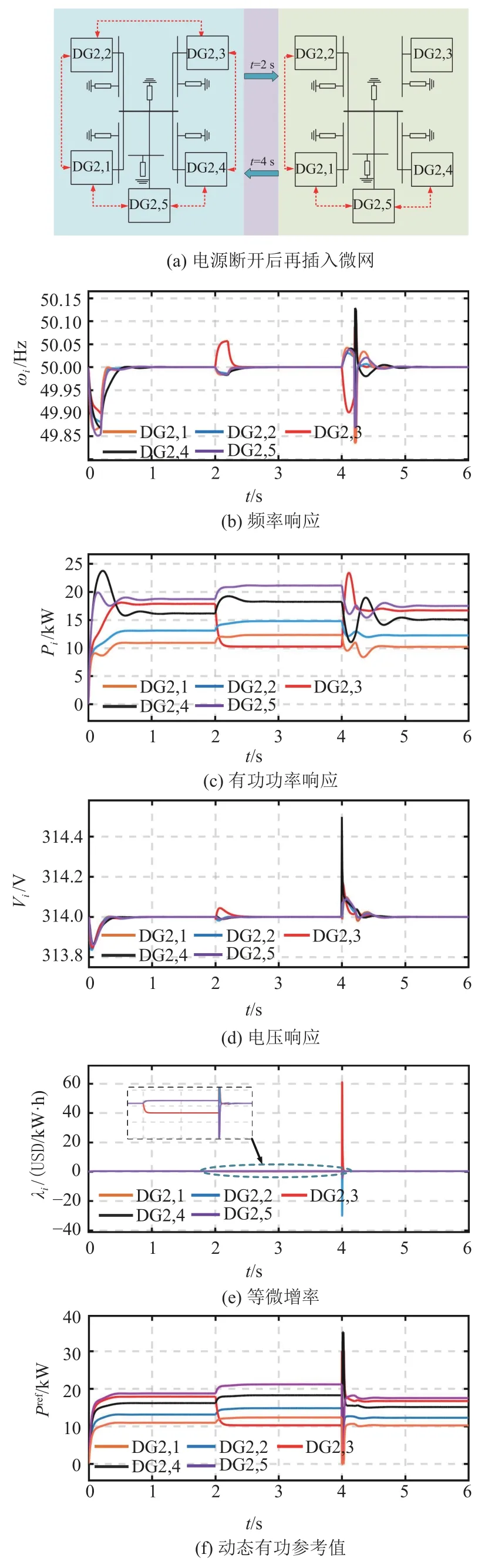
图10 即插即用Fig. 10 Plug and play
5 结论
1)针对功率优化和频率恢复问题提出了动态有功参考值这一概念,并利用等成本微增率算法,解决了功率经济分配问题,降低了系统发电成本,实现功率经济分配。同时,在不需要额外的补偿机制下,频率被恢复到额定值,减轻了系统负担。
2)设计了一个电压补偿机制,将电压维持在额定值,解决了传统下垂控制中电压不一致问题。
3)设计了一个含有4个子微网的多微网,并将其看作一个IEEE4节点系统,使得微网间可以进行能量互济,解决了微网发电机容量不能满足微网需求的问题。
(本刊附录请见网络版,印刷版略)
附录 A
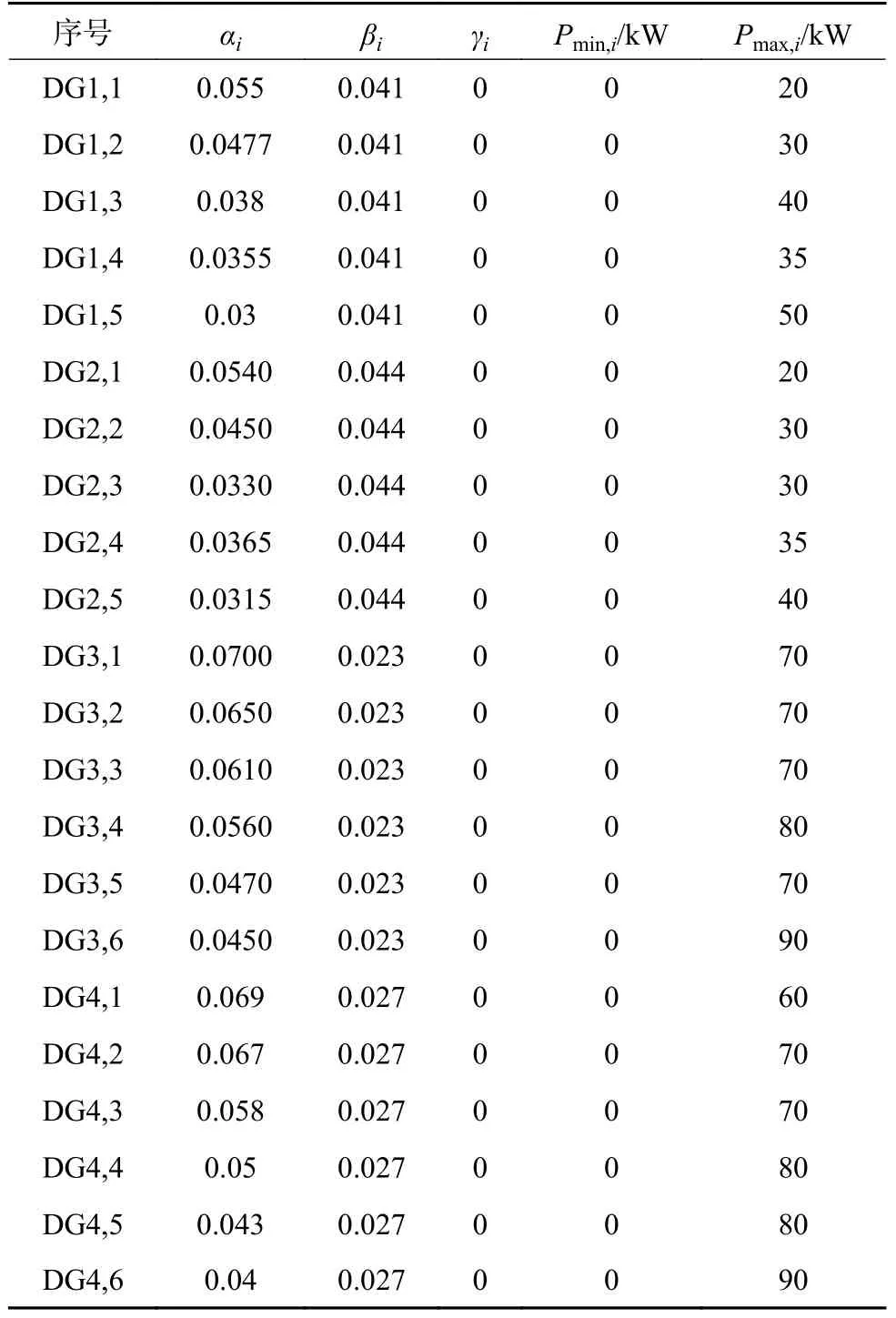
附表A1 发电机参数Table A1 Generator Parameters
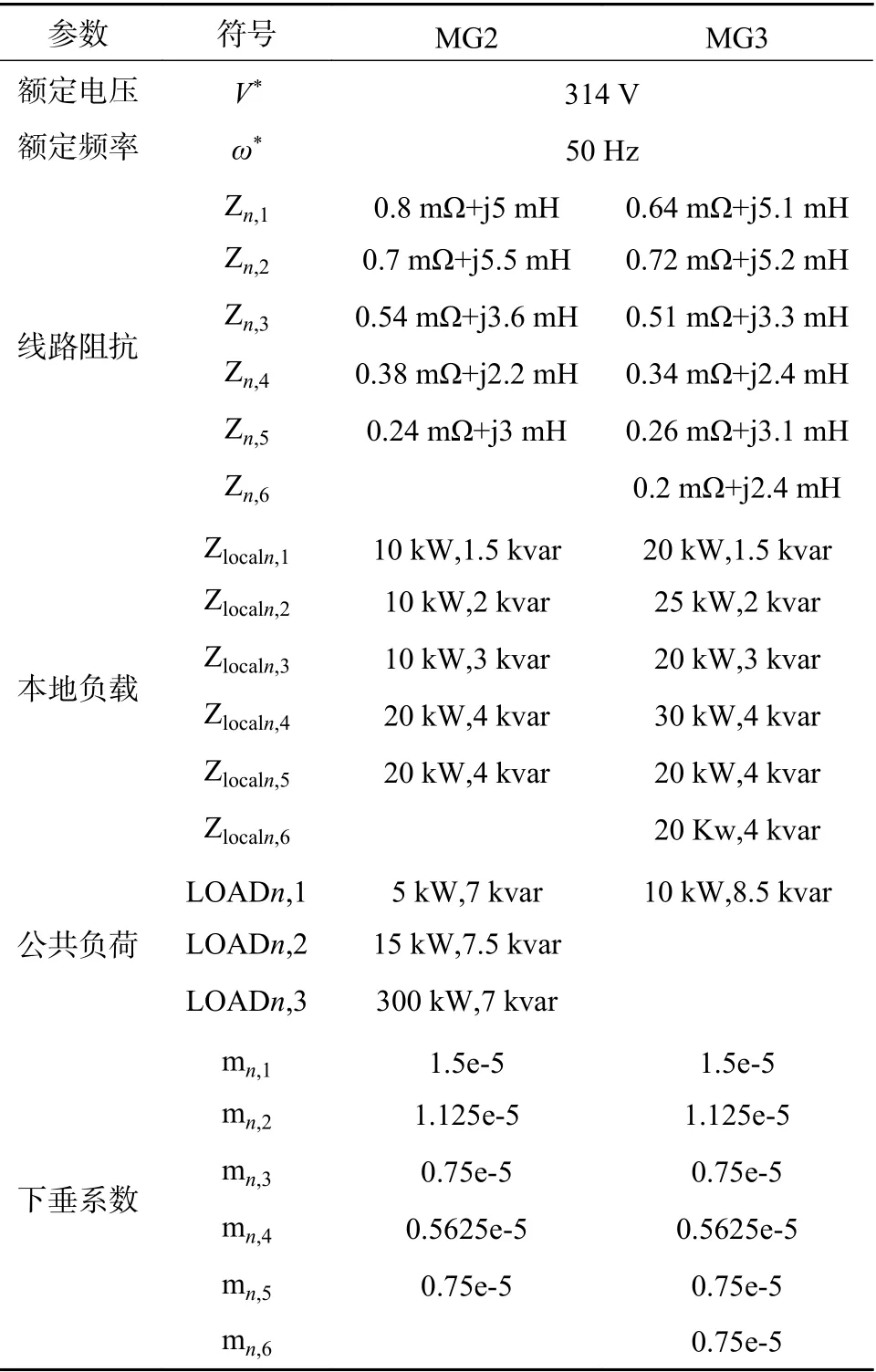
附表A2 MG2和MG3微网参数Table A2 Parameters of microgrid No.2 and microgrid No.3
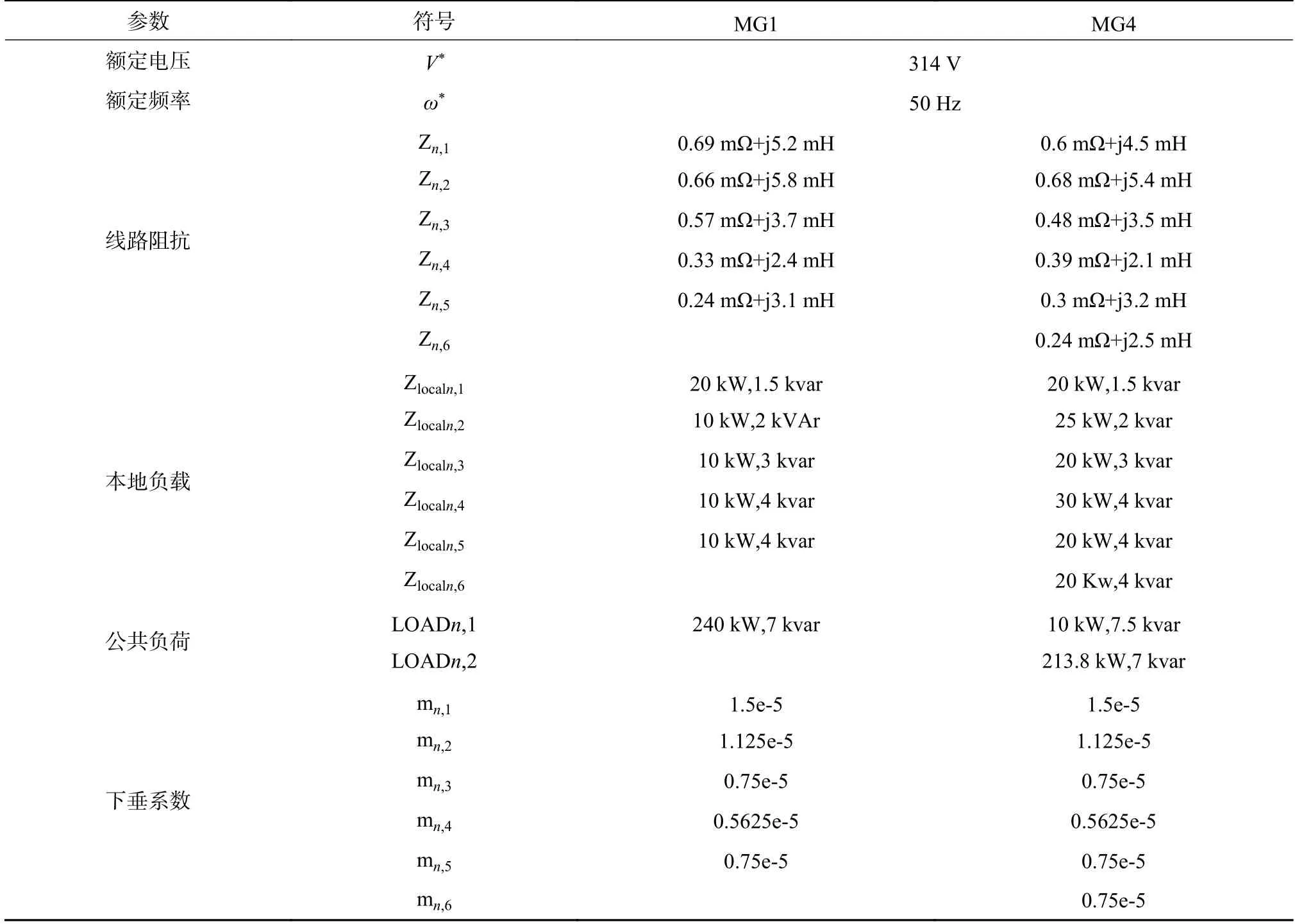
附表A3 MG1和MG4微网参数Table A3 Parameters of microgrid No.1 and microgrid No.4
猜你喜欢
环球时报(2022-06-15)2022-06-15
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
科学大众(2021年9期)2021-07-16
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
下一代英才(酷炫少年)(2017年3期)2017-06-15
学与玩(2017年4期)2017-02-16
通信电源技术(2016年6期)2016-04-20
电测与仪表(2015年16期)2015-04-12
