
基于EKF的PMSM滑模控制策略研究*
2021-10-11 06:50苗敬利于俊林马晨浩孙立城张书华
机械工程与自动化 2021年5期
苗敬利,于俊林,马晨浩,孙立城,张书华
(河北工程大学 信息与电气工程学院,河北 邯郸 056038)
0 引言
得益于稀土永磁材料及电力电子技术的发展,永磁同步电机(PMSM)以其质量轻、效率高、体积小等优势在各领域得到广泛应用[1],然而在应用中存在位置传感器维护成本昂贵、安装空间受限等问题。因此,在PMSM控制领域中关于无传感器的研究一直受到国内外专家学者的重视。
现阶段,研究人员针对无传感器控制问题提出多种有效算法,以进行PMSM转子位置和转速的估计,如SMO(滑模观测器),其优点在于具有良好的鲁棒性,便于实现,缺点是对电机相关参数估计不稳定[2]。MRAS(模型参考自适应系统)由自适应率、参考模型、可调模型组成控制策略,但难以适应参数,鲁棒性较差[3]。神经网络法有效地提高了电机控制系统的精度和稳定性,但其计算量大,实际应用尚不成熟[4]。EKF(扩展卡尔曼滤波)可实时跟踪系统的状态进行有效输出,同时可减少干扰、抑制噪声,即使当噪声估算不准确时,依旧能够让观测器收敛[5]。
滑模控制作为适用广泛的自动控制系统的设计方法,它的主要功能是对趋近律进行设计以及滑模面的选取,并且与控制对象的参数、外界扰动无关[6]。二阶超螺旋滑模控制(STSM)算法只需要滑模变量,并且具有很强的鲁棒性,已成功应用于电机的驱动控制[7]。
本文以扩展卡尔曼滤波算法为基础,建立基于EKF算法的估算转子位置和转速的数学模型,根据高阶滑模控制理论,设计二阶超螺旋滑模控制器取代PI控制器作为电流环调节器,并给出了收敛和稳定条件。
1 PMSM的数学建模
EKF算法可用于PMSM作为一种状态观测器,本文基于其电机模型选用静止坐标系搭建数学模型以降低其计算时间和非线性程度,提高估算精度。
表贴式三相PMSM在静止坐标系下的电压方程为[8]:
(1)
其中:uα、uβ为定子电压在α、β轴上的分量;iα、iβ为定子电流在α、β轴上的分量;R为定子电阻;Ls为定子电感;ωe为转子角速度;φf为永磁转子磁通;θe为转子位置。
将式(1)变换为电流方程,可得:
(2)
考虑到式(3)所示的关系式:
(3)
可以获得如下的状态方程:

(4)
y=Cx.
(5)
其中:
(6)
(7)
(8)
式(4)和式(5)是非线性的,此非线性使得式(4)和式(5)必须采用EKF算法将其离散化,搭建整体的数学模型为:
x(k+1)=f[x(k)]+B(k)u(k)+V(k).
(9)
y(k)=C(k)x(k)+W(k).
(10)
其中:C(k)为观测矩阵;V(k)为系统噪声;W(k)为测量噪声。
假设V(k)和W(k)均为白噪声,即有:
E{V(k)}=0,E{W(k)}=0.
(11)
其中:E{ }表示数学期望值。
在EKF算法的递推计算中,并不直接利用噪声矢量V和W,而是需要利用V的协方差矩阵Q以及W的协方差矩阵R。协方差矩阵Q和R被定义为:
(12)
假设V(k)和W(k)两者互不相关,初始时刻下的计算状态x(0)是随机矢量,与V(k)和W(k)也互不相关。
2 扩展卡尔曼滤波器的状态估计
EKF的状态估计大致分为预测阶段和校正阶段,具体步骤如下:

(13)


(14)
(3)计算误差协方差矩阵,即:
(15)
其中:
(16)
结果为:
(17)
(4)计算EKF的增益矩阵K(k+1),即有:
(18)

(19)
这一步骤称为校正的状态估计,即为“滤波”。
(6)为了下一次的估计,要预先计算出误差协方差矩阵,即有:

(20)
3 Super-twisting滑模控制器设计
超螺旋(Super-twisting)滑模算法又称为二阶滑模控制算法,其自身对滑模抖振具有较强的抑制能力以及鲁棒性强的特点。
对于一个动态系统[9]:
我们国家近十几年来中小学校不断推广尤其在发达的沿海形成北京、上海、深圳、杭州、武汉等地创办不同的社会实践基地,深圳市宝安区有社会实践基地但主要任务是接受来自深圳各个中学生来体验陶瓷拉坯、陶瓷盘泥、陶瓷绘制、陶瓷烧成、陶瓷样品观赏推动这一片区对陶瓷发展拓宽将起到一定的作用。
(21)
其中:x为状态变量;u为控制输入量;y为输出量;a、b、c均为未知函数。
u=-kP|s|rsgn(s)+u1.
(22)
且

(23)
其中:kP、kI、r为待设计参数,kP>0,kI>0。
Super-twisting滑模控制器不需要滑模变量的导数,在滑模面上收敛和稳定的充分必要条件[10]为:
(24)
其中:AM、BM、Bm为正整数,且满足不等式AM≥|A|、BM≥B≥Bm,A、B为输出量y的二阶导数的上限和下限。
因此,Super-twisting电流滑模控制器设计如下:
(25)



图1 Super-twisting滑模控制器框图
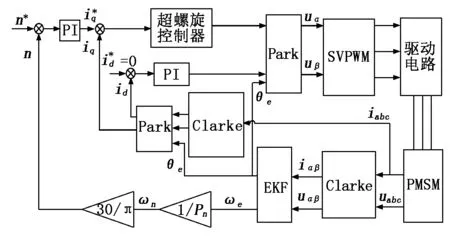
图2 基于EKF的PMSM矢量框图
4 仿真分析与验证
4.1 仿真模型搭建及参数设定
利用MATLAB软件在Simulink环境下搭建两电平空间矢量调制(SVPWM)的PMSM仿真模型。EKF算法采用s函数编写设计。电机部分参数如表1所示。

表1 PMSM部分参数
永磁同步电机输入量为静止坐标下的定子电压与定子电流,输出量为电机转速、转子位置以及定子电流估计值。Simulink仿真采用定步长,采样时间为10-6s。选用的协方差矩阵Q、R及误差协方差阵初始值p0如下:
Super-twisting控制器分别设定参数kP=58和kI=3。
4.2 仿真结果分析
仿真时间为0.4 s,初始时刻的负载转矩TL=0 N·m,PMSM给定零速以空载启动上升到给定参考转速1 000 r/min,到达0.2 s时突然负载转矩变为TL=3 N·m,电机转速估计值与实际值、电磁转矩、三相电流和转子位置的仿真结果如图3所示。图3(a)显示从初始零速到达参考转速,超调量很小,仅用0.015 s便达到稳态,在0.2 s时遇到负载转矩突然的增大,转速也能很快恢复。图3(b)、图3(c)分别显示电磁转矩和三相电流的变化情况,图3(d)为转子位置估计值与实际值的变化曲线,估算曲线与实际曲线偏差较小,拟合情况良好,波形往返有规律性。
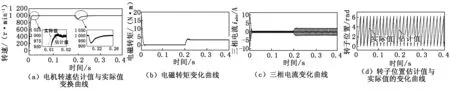
图3 仿真结果
当初始条件不变,0.2 s时负载转矩改为TL=0,转速突然降为800 r/min,仿真结果如图4所示。图4中显示转速能在突然降速时很快进入稳定状态,平稳状态波动范围小,无超调,转速跟踪性能好,能够满足系统稳定性要求。
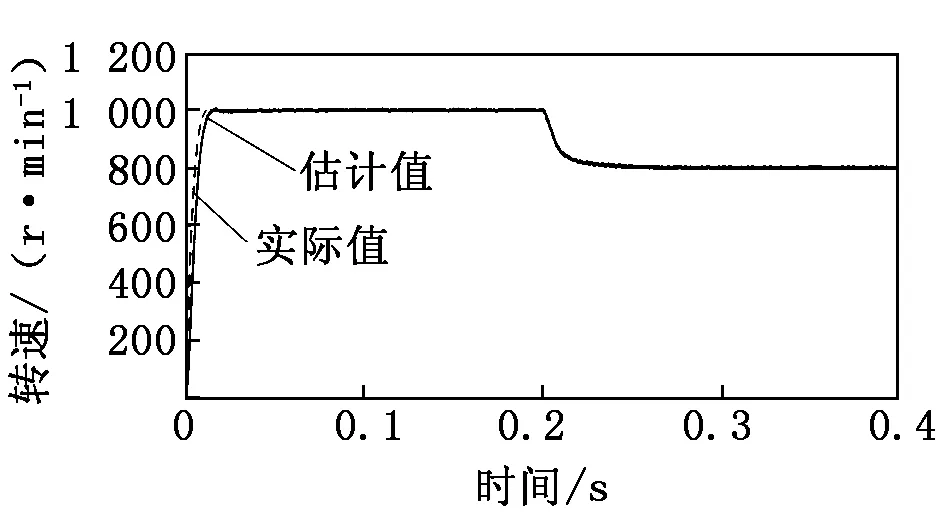
图4 电机转速估计值与实际值变化曲线
5 结论
在静止坐标系下搭建了基于PMSM的EKF算法和超螺旋算法的数学模型,在MATLAB环境中构建仿真平台,实现了EKF算法用于转速与位置估计的无传感器控制;并利用超螺旋算法设计的滑模控制器取代PI控制器,进一步削弱了系统的抖振和超调,缩短了动态响应时间、提高了抗扰动能力。经过仿真,结果验证了该策略具有一定的实用性意义,能够满足实际电机的控制需求。然而该方法在估计精度和理论分析水平方面仍需进一步提高,以实现更高的控制精度。
猜你喜欢
防爆电机(2021年1期)2021-03-29
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年2期)2018-12-09
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
雷达学报(2017年3期)2018-01-19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
电机与控制应用(2015年10期)2015-03-01
