
足底振动刺激诱发人体特定方向姿势调整的测试系统研究
2021-10-11 13:55李高峰梅剑峰张蒙蔡红波曹萍李陈娜张小军
中国康复理论与实践 2021年9期
李高峰,梅剑峰,张蒙,蔡红波,曹萍,李陈娜,张小军
1.北京社会管理职业学院(民政部培训中心)康复工程学院,北京市 101601;2.民政部肌骨生物力学重点实验室,北京市 101601;3.北京工业大学机械工程与应用电子技术学院,北京市 100124
人体的姿势控制是保持身体姿势稳定性和方向性的能力[1]。不管是静态或动态活动时,人体保持稳定的姿势需要感觉系统、肌骨系统和神经系统间复杂的相互作用,一旦这些相互作用受到影响,将会出现平衡性欠佳和姿势不良的状况[2-3]。站姿是人类最重要的基本姿势,人们每天都需要在双足直立下从事各种日常活动。足底是身体和外界支撑面之间的接口,足底皮肤的感觉输入对于人体姿势的稳定具有重要的作用,站立时人体姿势的维持、动作的协调离不开足底皮肤感觉的贡献[4-6]。有研究表明[7],足底不同的皮肤感受器可以反映出“足底压力分布图”,足底特定区域的振动会通过足底皮肤感受器向中枢系统传入该区域下方压力增加的感觉,从而引起身体向足底刺激区的反方向倾斜来调整身体的压力中心(center of pressure,COP),如足底后部施加振动刺激会引起身体的前倾[8]。
在已经开展的相关研究中,有研究采用较大的圆形、椭圆形振动探头[7]或扁平超薄型马达[9]作为振子提供振动刺激,该类型振动探头的位置不易调整,而且不同振子间存在着电压-频率特性和振幅的差异。近年来,有研究者提出采用激振器提供振动刺激[10-11],很好地解决了不同受试者足底刺激位置的调整。但是,相关研究采用的测试装置存在站立板高度过高增加立于其上受试者的不安全感,以及激振板(含探头)的质量较大加重激振器的负载,从而影响振动幅值的可调整范围。基于上述原因,民政部肌骨生物力学重点实验室设计了一种采用激振器作为振源的闭环控制足底振动刺激测试系统,可以在足底不同位置施加不同幅值和不同频率的振动刺激,通过对健康大学师生进行测试分析以探索该系统诱发身体特定方向姿势调整的效果。
1 资料与方法
1.1 一般资料
2019 年10 月2 日至6 日,在民政部肌骨生物力学重点实验室,从北京社会管理职业学院(民政部培训中心)康复工程学院招募青年教师和大学生健康志愿者25 例,其中男性10 例,女性15 例;平均年龄(21.34±3.11)岁;平均体质量(58.14±10.93)kg;平均身高(166.05±8.06)cm;平均脚长(39.08±2.61)cm。
纳入标准:①无神经疾患病史;②无肢体损伤;③无异常姿势;④对本研究知晓,并亲自签署知情同意书。
排除标准:①周围神经损伤;②足部皮肤破损;③肌骨系统损伤;④糖尿病;⑤肥胖;⑥有身孕;⑦足长超过45 cm。
本研究经北京社会管理职业学院伦理委员会审核并批准(No.2018ZD-1)。
1.2 实验测试系统
实验测试系统包括振动刺激装置和姿势变化检测、分析等生物力学测试设备(图1)。振动刺激装置通过与受试者足底接触以支撑其站立,主要由站立架、激振器架、振动板、振动探头、振动执行和控制单元等构成。
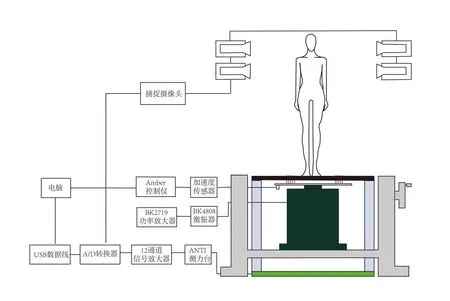
图1 足底振动实验测试系统
站立架由支柱和站立板经螺纹连接而成。支柱是由铝合金型材料牢固栓接而成的长方体框架结构(400×500×243 mm);站立板(400×500×10 mm)置于支柱上方,由厚度10 mm 的不锈钢板经激光打孔(26行×31 列)制成,孔径7 mm,相邻两孔中心间距为10 mm。
激振器架由升降机构和外部保护壳组成,通过4个可调支脚支撑于地面。激振器(型号为英国Bruel and Kjaer(BK)4808,配套2719 型功率放大器)置于升降机构的平台上,通过摇动外部的把手实现激振器的升或降从而调整振动探头的初始预压力,探头初始的伸出量由激光测距传感器(ZLDS102-50-25-RS485-IIN5-AL-CG-4,ZSY GROUP LTD,英国)实时监测并输出显示结果,测量精度可达0.1 μm。激光测距传感器由稳压电源供电,配套的测量软件ZLDS10X(V1.1.2版)通过图形轮廓和数字实时显示测量结果。
振动板(250×300×3 mm)由铝合金板经激光打孔(22 行×22 列)制成,孔径4 mm,相邻两孔中心间距10 mm。振动板通过中心及以该中心为圆心、直径50.8 mm 的圆上均布的5 个M 5 mm 通孔与激振器相连接。Amber振动控制仪(东陵公司)为BK2719型功率放大器提供正弦信号,用于控制BK4808 型激振器。加速度传感器(PCB 257B03)固定在振动板上,将振动板的加速度信息反馈给Amber振动控制仪进行运算处理以实现闭环控制。振动探头为单通尼龙六角螺柱,刺激足底端的直径为2.55 mm,另一端与铝合金材质的振动板螺纹连接,能够自由穿过站立板孔径并做垂直上下运动。
1.3 实验数据采集
1.3.1实验测试准备
通过摇动激振器升降把手,调整振动探头顶部伸出站立板上端面1 mm。作用于左/右足部的振动探头位置分为前、后两组,前组作用于跖趾关节足底区域,为2×6 阵列,后组作用于后跟足底区域,为3×4阵列。见图2。

图2 足底振动刺激位置分布
启动Qualisys Track Manager(QTM)软件,选择外部触发控制,设置数据采集时间,设置Amber振动控制仪的振动参数,对放置站立架的三维测力台(AMTI BP400600,美国)执行清零操作。启动功率放大器,选择合适的增益档位;准备好外部触发器按键,以使Amber振动控制仪与运动采集系统同时触发。
画出受试者足部轮廓,标记出第I、第V跖骨头和足后跟的位置,据此确定并调整安装适合每位受试者足部尺寸的振动探头。然后,让受试者站在振动台上感受振动刺激3 min,确保振动量超过其振动感受阈值。
1.3.2数据采集过程
受试者光脚自然直立于站立架上,双手垂于身体两侧[12],双足脚掌和足跟处于前组和后组振动探头上方,戴好眼罩、耳罩以排除视觉输入干扰和激振器高频振动时产生的噪音干扰[13]。嘱受试者听从实验人员的指令,实验开始后一直保持不动,不要刻意抵抗姿势的变化,若有跌倒倾向时可跨步调整。
受试者接受8 个振动位置的刺激:左足前部、左足后部、右足前部、右足后部、双足前部、双足后部、左全足和右全足,每个位置分别施加20 Hz、40 Hz、60 Hz、80 Hz 4个频率,共计32个振动条件。每次实验数据采集时间为230 s,足底的8 个振动位置分别接受4个频率(实验人员在Amber振动控制仪中存储16 组排列顺序不同的频率控制程序并为其编号1 至16,根据受试者现场自己随机抽签选择的编号调用对应的控制程序开展实验)的振动刺激,每个频率条件振动3 次,每次振动驻留时间为3 s,中间暂停时间为12 s (图3)。每次数据采集前后,进行脚底温度的测量,确保脚底温差变动范围控制在1 ℃以内,用于排除温度变化对足底皮肤感受器的影响。

图3 一次数据采集时间分配示意图
一名实验人员操作电脑设置数据采集软件,负责观察数据采集情况和数据存档;另一名实验人员测量足底温度,按下外部触发器,开始数据采集,同时负责保护受试者,避免其在实验过程中意外摔倒。
1.4 数据处理
测力台通过100 Hz的采样频率记录受试者静态站立时COP 的坐标值、足底所受的三维力(垂直方向的Fz,水平面的Fx、Fy)及其对应的力矩(Mz、Mx、My)。由于站立架与测力台有253 mm 的高度差,导致足底平面与测力台表面不在一个水平面。为了验证站立架高度对于受试者COP实际测量值的影响,特引入COP 理论值计算公式,并与由QTM 采集软件直接输出的测量值进行比较(COPx表示X 方向COP 测量值,COPy表示Y 方向COP 测量值,COPtx表示X 方向COP 理 论值,COPty表 示Y 方向COP 理 论 值),相 关计算公式如下。

实验所得的原始数据经过二阶曲线拟合滤波处理后用于研究分析,采用COP 波动的峰值(最大值或最小值)作为描述人体姿势控制的指标[10],该峰值由COP发生振动最明显处前后50 ms 范围内所有测量数据取平均值所得。
1.5 统计学分析
处理后的数据采用SPSS 22.0 统计软件进行分析。对每个位置不同频率下振动和非振动时的COP值采用方差分析。显著性水平α=0.05。
2 结果
2.1 站立架高度对于COP值的影响
随机从一受试者实验数据中选取一次采集的23 000 个数据用于分析,COPx 与COPtx (r=0.997)、COPy 与COPty(r=0.976)显著线性相关,且平均误差值不超过2%。

2.2 足底振动刺激诱发人体姿势特定方向的调整
姿势响应幅值有正负之分,y 轴正值、负值分别表示指向身体前侧、后侧,x 轴正值、负值分别表示指向身体右侧、左侧。足底在受到振动刺激时,身体的姿势调整幅度增大,除双足前部、双足后部受振时左右方向(COPx)和左全足、右全足受振时前后方向(COPy)之外,受振时和不振时COP 值均有显著性差异(P<0.05)。左、右足足底受到振动刺激时,身体的左右方向(COPx)姿势调整明显;足底前、后部受到振动刺激时,身体的前后方向(COPy)姿势调整明显。见表1~表2。
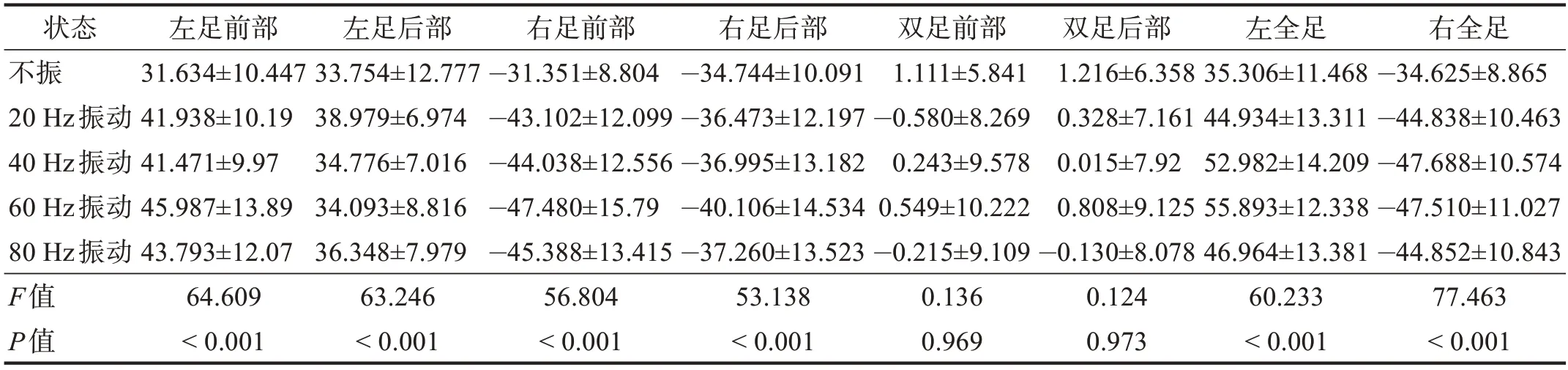
表1 足底不同位置在不同频率振动的COPx值比较(n=25,mm)

表2 足底不同位置在不同频率振动的COPy值比较(n=25,mm)
3 讨论
本研究结果显示,实验测试系统能够对足底不同位置的皮肤提供不同幅值和不同频率的振动刺激,并且能够诱发和检测出振动刺激作用下人体的姿势调整情况。调整振动控制仪的正弦信号参数可以设置不同的振动频率,针对足底皮肤中包含快速适应和慢速适应两种类型的感受器,本研究选择20 Hz、40 Hz、60 Hz、80 Hz 共4 个频率段。BK4808 激振器的最大激励峰值力为112 N,根据实验用激振板和振动探头的总负载质量,计算出在20~80 Hz的频率下激振器能够提供的极限峰值振幅为1.2~6 mm,通过调整功率放大器增益旋钮能够获得实验所需的振幅(1 mm);同时加速度传感器实时把振动探头的加速度信息反馈给振动控制仪构成闭环,能够保证在4 个不同频率下的振动幅值恒定。站立架能够稳定支撑受试者站立其上,站立板密布的小孔允许振动探头接触足底并在其中垂直上下移动,通过调整与激振板相连的振动探头位置可以刺激受试者足底不同位置的皮肤,从而刺激到皮肤内的感受器。激光测距传感器、测力台和运动捕捉系统能够监控、检测和记录受试者足底预压量以及姿势的调整变化信息。
Christopher[10]同样采用激振器为受试者提供足底的振动刺激,但实验用站立架比测力台高出416 mm,在分析姿势调整的数据时,需要对测量的COP数值进行校正。本研究显示,站立架的高度(包括243 mm 的支柱和10 mm 的站立板,合计253 mm)对于受试者COP 数值的影响在误差允许范围之内,可以直接使用QTM 采集到的COP 值代替其理论值进行数据分析,而且本实验装置高度仅比一层普通台阶略高,有效降低受试者担心跌落的心理恐惧。此外,为保障受试者的安全,在站立架的四周设置与站立架等高的保护壳体,以便受试者在失去平衡时能够进行跨步调整。
本研究同时表明,左足足底皮肤受到振动时,姿势响应幅值为正值,表示身体在左足受到振动刺激后向右倾调整;右足底皮肤受到振动时,姿势响应幅值为负值,表示身体在右足受到振动刺激后向左倾调整,这些姿势调整趋势与Kavounoudias等[7-8]的研究报告结果一致。双足前部或双足后部受振时,身体的姿势响应幅值不明显,原因在于左足和右足同时受振,身体同时既有向左的姿势响应又有向右的姿势响应,姿势的调整作用相互抵消。足前部皮肤受到振动时,姿势响应幅值为负值,表示足前部受到振动刺激后身体向后倾调整;足后部皮肤受到振动时,姿势响应幅值为正值,表示足后部收到振动刺激后身体向前倾调整,该姿势调整趋势与Kavounoudias 等[7-8]、Cynthia等[14]的研究报告结果一致。左全足或右全足受振时,身体的姿势响应幅值不明显,原因在于足前部和后部同时受振,身体同时既有向前的姿势响应又有向后的姿势响应,姿势的调整作用相互抵消。同时,足底不同振动刺激位置对于受试者的姿势调整存在显著的影响,而足底施加的不同振动频率对于受试者身体左右方向和前后方向的姿势调整没有显著的影响,这与Christopher[10]的研究结果一致。
综上所述,该实验测试系统能够对足底不同位置(足前部、足后部)的皮肤施加不同频率(20~80 Hz)、不同振幅(0~1 mm)的振动刺激,并且诱发人体特定方向的姿势调整。该测试系统可以用作开展足底皮肤感受器对姿势控制影响的相关研究,如探索足底皮肤感受器通往大脑的通路、身体姿势对周围神经传入的调节机制;同时,也为开发相应的康复产品提供理论支撑,如设计专门的振动刺激鞋垫用于脑瘫儿童的姿势训练或控制。
鉴于激振器闭环控制系统的计算耗时增加,本研究单次数据采集时间较长(超过3 min),对受试者的持续站立能力要求较高。后续研究将不断完善和拓展测试系统的性能,缩短实验时间;适时增加肌电信号、脑电信号等检测指标,并着手开展对有姿势障碍人群[15-19]的临床实验研究,以进一步探求足底本体感觉[20-21]或皮肤感受器[22-26]对于姿势控制调整的作用机制,并把足底振动刺激的研究成果用于姿势异常者的临床康复实践中;同时,探讨足底局部振动与工作环境下通过施加足底的垂直振动(全身振动)所导致的姿势变化之间的差异[27-29]。
利益冲突声明:所有作者声明不存在利益冲突。
猜你喜欢
机械制造与自动化(2022年2期)2022-04-19
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
时代农机(2019年8期)2019-12-27
中国机械工程(2019年22期)2019-12-02
中国生殖健康(2019年10期)2019-01-07
科技创新与应用(2018年2期)2018-01-19
电子制作(2017年7期)2017-06-05
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
