动车组牵引控制单元DSP程序设计与实现
2021-10-08 02:23王丽,孙华,陈敬,张东
计算机测量与控制 2021年9期
王 丽,孙 华,陈 敬,张 东
(西安翔迅科技有限责任公司,西安 710068)
0 引言
铁路运输在我国交通运输领域中一直扮演着举足轻重的角色,根据中长期铁路网规划,到2020年全国铁路营业里程将达到12万公里以上,其中客运专线1.6万公里以上[1]。2019年铁道统计公报显示,全国铁路营业里程达到13.9万公里,其中,高速铁路营业里程达到3.5万公里;全国铁路机车拥有量为2.2万台,其中电力机车1.37万台[2]。但是,我国高铁事业飞速发展的脚步仍然不能满足人民日益增长的美好生活需要。
近年来,随着国内动车组的不断发展与全面建设,我国对动车组的性能要求逐渐提升,牵引传动系统作为动车组的动力核心部件[3],其功能的可靠性和高效性至关重要。牵引传动系统对机车运行的控制、监测和保护等功能还需进一步的深入研究与优化。因此,关于动车组牵引传动系统的运行机制、监测功能、保护功能,文中做更进一步的研究。
针对牵引传动系统,我国学者开展了众多研究与实践工作。崔恒斌等人基于Matlab/Simulink建立了牵引传动系统离散数学模型,并使用dSPACE实时仿真器[4-5]搭建了牵引传动系统实时仿真平台,最终通过测试牵引控制单元的车载程序,验证了该平台的有效性和正确性[6]。高吉磊等设计了基于连续功能图的软件开发平台TKDET,并用于动车组牵引传动系统中CPU板卡软件的开发和调试[7]。顾春杰等采用RT-LAB实时仿真器,并与GE公司CT11系统为开发平台的控制器,以及列车通信网络组成硬件在环的实时仿真系统[8]。江程研究了动车组牵引传动系统参数的设计方法,并使用Matlab/Simulink搭建了牵引传动系统的仿真模型,完成对动车组参数的仿真验算[9]。王琛琛等针对大功率电机应用场合中逆变器开关频率低的问题,提出了适用低开关频率的SHEPWM和SVPWM控制策略,具体分析了各个调制策略的优缺点并对其进行了验证[10]。
结合我国学者已有的研究成果,文中针对大功率牵引传动系统设计了控制算法和调制策略,以及可在线调测控制算法的上位机软件,最后在Matlab/Simlink和dSPACE仿真器搭建的动车组牵引传动系统实时仿真平台验证了控制策略、程序设计的可用性、正确性和实时性。
1 系统结构及软件总体设计
动车组牵引传动系统采用交流电动机驱动轮对。动车组的受电弓先从接触网获得25 kV的单相交流电,经变压器降压后,再由两个相同结构的四象限整流器变换为电压可调的直流电,直流电通过逆变器和相对应的控制模块将直流电转换为可驱动电机的频率可调的三相交流电,最终电动机的传动轴通过减速齿轮组传递给轮对,从而带动列车运行。
TCU是交流传动系统中的控制单元,其中包含CPU卡、整流卡、逆变卡、数字信号输入输出采集卡、数模信号转换采集卡,其中整流卡发生PWM信号,控制四象限整流器输出直流电压,逆变卡发生PWM信号,控制PWM逆变器发出三相交流电(同时反馈回控制系统)以驱动电机转动。TCU与主功率电路的控制关系如图1所示。

图1 TCU与主电路的控制关系图
整流和逆变控制、调制算法(下位机程序)将分别在整流卡和逆变卡的DSP芯片中实现。考虑到整流、逆变板卡装上结构壳安装到TCU机箱后,无法连接DSP程序调测用的仿真器,故为了板卡装箱后便于在线调试DSP中的控制程序,设计和开发了DSP在线调试软件(上位机软件)。整流和逆变DSP程序分别负责系统对四象限整流器和PWM逆变器的控制,并为DSP在线调试软件提供数据采集和通信支撑。DSP在线调试软件运行于PC机中,通过人机交互界面,为用户提供DSP控制程序的关键指标波形绘制和程序升级等功能。牵引传动控制软件架构如图2所示。

图2 牵引传动控制系统架构图
下位机程序运行于DSP微处理器,使用C语言编写[11]。
上位机软件使用QT、Python 3.8.0、Sqlite3技术[12],通过RS232串口连接整流卡和逆变卡进行状态监控、在线调试和下位机程序在线升级。软件由业务层和服务层组成,业务层为用户提供人机交互界面,服务层为业务层提供基础的后台操作支撑。上位机软件类图如图3所示。

图3 上位机软件类图
2 系统软件详细设计
2.1 整流控制系统
2.1.1 整流控制算法
整流部分的控制采用瞬态直接电流控制算法,如图4所示。控制方式为前馈控制和电压电流双闭环结合的复合控制策略。图4中锁相环采集的相角和频率用于计算变压器的端电压(其中uLN=ωLNin*cosωt,uRN=RNin*),uLN为动车组变压器副边网侧电感LN的端电压,uRN为动车组变压器副边网侧电感RN的端电压,其中(un-uLN-uRN)为前馈控制的扰动信号;电流内环采用适合正弦波谐振的PR控制,利用锁相环求得的相角和频率用于计算电网电流给定信号in*,实现输出的实际网侧电流in跟随给定电流in*,实现输入端的功率因数接近1;电压外环采用PI算法[13],前馈和内外环结合计算的给定电压为Udc*,PI算法控制流侧电压输出udc跟随给定电流Udc*,实现逆变器的输入电压稳定可控[14]。

图4 瞬态直接电流控制原理框图
由图4可得:
(1)

(2)
(3)
其中:Ti和Kp为调节器的参数,IL为直流侧负载电流平均值,unm为网侧电压峰值,K为比例放大系数,ω为网侧电压角频率。为了减轻直流环节电压PI调节器的负荷,改善PI调节器的动态响应,采用直流环节电流IL来计算给定电流的有效分量inm2*,通过式(3)可获得参考电压信号即调制信号uab(t)。
调制算法采用双极性SPWM调制方式[15]。当调制波uam大于三角波ucm时,输出1,反之为0。PWM逆变器两组整流桥臂的调制方式一致。
2.1.2 整流控制程序设计
整流控制程序分为主控部分和算法部分。主控部分包括系统时钟配置、定时器中断配置、LED灯配置、I/O引脚配置、中断等待和中断处理。图5为主控程序流程图。

图5 主控制程序流程图
定时器中断服务程序是控制程序的关键,控制算法被中断服务程序调用。定时器中断按照固定周期触发一次,中断触发后读取采样值,执行瞬态直接电流控制算法,即完成电网角度的锁相环控制、给定电网电流的PI控制、调制波计算中间量Ui的PR控制以及调制波生成等。
调制波生成流程和SPWM信号生成流程分别如图6中(a)和(b)所示。将DSP算法生成的调制波与三角波比较,生成整流器4个开关的PWM信号。调制算法计算出每一中断周期4个PWM信号,分别向4个复用为PWM功能的GPIO写0或1即可。

图6 瞬态直接电流控制算法流程图
2.2 逆变控制系统
2.2.1 逆变控制算法
本文采用间接磁场定向控制[16-17],如图7所示,将采集的三相电流按照转矩和磁链的控制进行解耦,算法即等效为类似于直流电机的控制方式,其中,控制的主要思想是通过对转子磁场同步角频率的积分来获得磁场定向角φ。
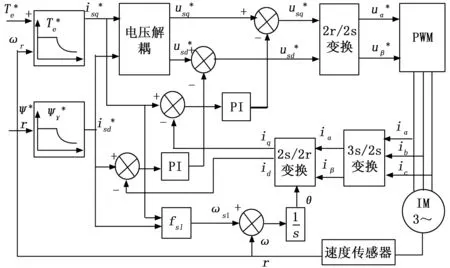
图7 间接磁场定向矢量控制原理框图
转差角频率为:
(4)
利用转速传感器得到转子角频率ωr,则转子磁场同步角频率为:ωs=ωr+ωsl,对其进行积分运算即可得到转子磁场定向角:
(5)
经3/2变换和2/2变换所得的dq轴坐标系下,求得转子磁链电压模型的状态方程,如式(6)。
(6)
式中,漏磁系数σ=1-Lm/LsLr,转子电磁时间常数为Tr=Lr/Rr。
电压控制单元的表达式为:
(7)
其中:usd、usq为前馈电压,与式(6)一致,△usd、△usq为PI运算求得的反馈电压。
根据动车组的牵引特性曲线可知,牵引电机运行方式为恒转矩-恒功率。电机运行在低频区时,为了减小电路中的多次谐波和定子产生稳定均匀的磁场,在低频区一般采用开关频率相对较高的异步调制方式;当电机启动后考虑开关频率切换的平滑性和电路对电机的控制要求较低,电机在中高速采用同步调制模式;在高速区,考虑逆变器的母线电压的利用率,采用方波模式[18-19]。
2.2.2 逆变控制程序设计
逆变控制系统的主控制程序流程和整流控制系统一致,此处不再赘述。
根据间接磁场定向矢量控制算法,绘制程序流程图,如图8所示。
研究证明HPV的感染是可以预防的,并且宫颈癌可能成为第一个可以用疫苗预防的癌症。研究发现,HPV的L1蛋白保守度高,因此可以作为HPV的特异性抗原用来研究制造病毒预防疫苗。目前市面上的预防疫苗都是利用重组的DNA分子所表达的病毒样颗粒(virus-like particles, VLPs)制成的疫苗。

图8 间接磁场定向矢量控制算法流程图
动车组在低速区,采用七段式SVPWM异步调制策略,如图9(a)所示。在恒功率阶段,逆变器采用方波控制技术[20]。全速域PWM逆变器的调制过程如图9(b)所示。
2.3 上位机软件
上位机软件用于实时查看整流卡、逆变卡中牵引传动控制运行状态,其中包含人机交互界面、DSP支撑程序和二者数据通信程序。用户通过上位机软件针对TCU整流、逆变控制系统进行数据监控与实时操作。
2.3.1 人机交互
用户界面由多个窗口组成,完成多个关键信息界面的组合嵌套显示。主界面由串口连接图标、状态栏、工具栏和菜单栏组成,完成TCU的连接、变量波形展示、集成终端、内存值窗口等功能。
上位机软件的启动经历线缆连接、启动软件、载入配置文件、初始化界面元素4个过程,如图10所示。

图10 上位机软件启动的UML活动图
在上位机软件上观测的每一个物理量(如中间环节直流电压)都对应一个TCU DSP程序中的重要变量。数据库为上位机软件提供可随时更新的离线变量名信息集,上位机的变量查询以及变量设置均需依赖于数据库信息。变量信息表设计如表1所示。

表1 变量信息表
变量信息与分组信息通过数据库主/外键进行关联,在进行远程变量数据操作时“分组名+变量名”构成一个合法的变量标识,分组信息表设计如表2所示。

表2 分组信息表
TCU程序升级包分为两种类型:系统程序和应用程序。升级包文件头部的8个字节包含文件类型、文件版本、烧写地址。剩余部分均为待写入Flash的目标程序。
DSP支撑程序分为驱动程序和应用程序。驱动程序包含SCI、EMIF、Timer、LED、FLASH、I2C、EEPROM配置功能。应用程序包含获取算法程序版本号、上位机版本号、变量信息、板卡类别、内存值等功能,设置变量值、内存值、升级程序,以及控制外设等。
2.3.3 上、下位机通信协议设计
为保证数据的有效传输,本文在RS232链路层协议之上另设计一层传输层协议,保证命令帧和文件帧能够可靠传输,如表3所示。
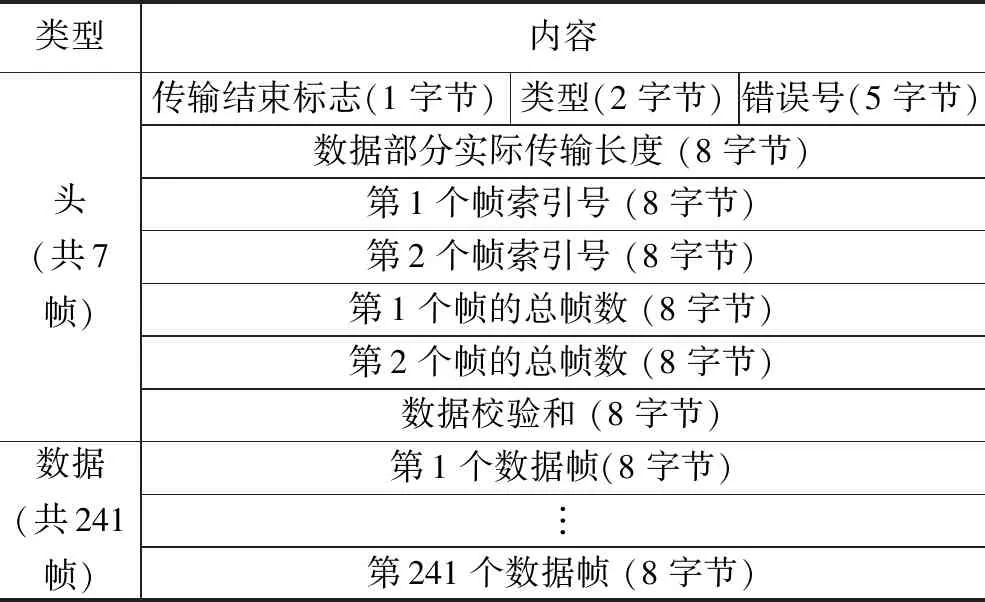
表3 传输层协议帧格式
传输层支持两种格式的协议帧,分别是命令帧和文件帧。对于命令帧,数据部分包含了命令字和参数信息;对于文件帧,数据部分第一个字节为文件传输请求的命令字,剩余字节为文件流数据。
数据帧遵循交互式的“请求-响应”模式。命令帧遵循一次性“请求-响应”,分别如图11(a)(b)所示。
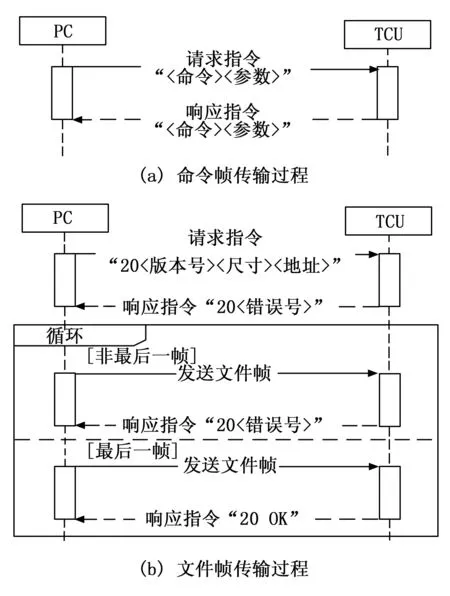
图11 命令帧和文件帧传输
3 实验结果与分析
3.1 牵引传动控制系统
牵引传动系统实时仿真平台包含牵引控制单元实物、dSPACE仿真器、接口箱、上位机PC(安装有TCU整流卡和逆变卡的上位机软件)、工控机等设备。系统如图12所示。
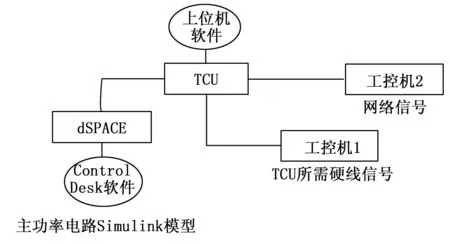
图12 牵引传动系统半实物仿真平台架构
从dSPACE仿真软件中可以看到,经过整流(锁相环)控制后,网侧电流与网侧电压的频率相同、相位相同,如图13(a)所示。中间直流环节输出的直流电压跟随给定电压2 700 V上下波动,如图13(b)所示。当牵引工况车速达到320 km/h时,逆变器输出的电流为互差120度的三相交流电,如图13(c)所示。电机输出的三相相电压为0、±Ud、±Ud/3、±2Ud/3,如图13(d)所示。牵引特性曲线如图13(e)所示。

图13 牵引工况下,关键指标波形图
3.2 上位机软件
上位机主界面里的变量列表窗口列出了所有可以查询的变量名称和分组名称,变量波形窗口绘制了变量实时值的波形图,命令窗口显示了本软件支持的命令,如查询变量实时数据等,内存值窗口显示了DSP CPU内存相应地址中的实时内存数据。
使用串口线连接PC与TCU整流和逆变卡后,可以使用服务监控软件完成DSP控制程序的在线升级。
4 结束语
文中基于牵引控制单元DSP微处理器,设计并实现了一整套包含整流和逆变的控制、调制程序,以及配套在线调试上位机软件的牵引传动控制系统,其在dSPACE半实物仿真平台上成功驱动列车从0平稳提速并稳定至320 km/h。实验证明,此牵引传动控制程序和配套上位机软件,具有良好的实时性、准确性、易用性,下一步将在此基础上完成整流、逆变控制算法以及上位机软件的优化工作。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
青少年科技博览(中学版)(2022年1期)2022-03-28
机电工程技术(2021年3期)2021-09-10
智族GQ(2019年9期)2019-10-28
中国测试(2018年9期)2018-05-14
发明与创新·大科技(2016年10期)2016-10-22
汽车观察(2015年10期)2016-04-06
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
现代电子技术(2009年6期)2009-05-31