
基于激光和CCD组合的小孔转轮重复定位精度测量方法
2021-09-27 02:48梁为育
应用光学 2021年5期
梁为育,叶 超,胡 秋,刘 盛
(中国工程物理研究院 机械制造工艺研究所,四川 绵阳 621900)
引言
重复定位精度是评估运动部件位置精度的重要指标之一,反映了运动部件反复运动到同一位置所得到的位置精度的一致程度[1]。测量重复定位精度常用的方法是使用激光干涉仪、光栅尺测微仪、激光测量仪、激光跟踪仪等仪器进行测量[2-3]。这类测量精度高,但仪器成本高、操作复杂,且只能在普通场合下使用。近年来,随着工业相机测量技术的成熟,出现了利用工业相机测量重复定位精度的应用案例。邓辉等人[4]提出了一种基于机器视觉的重复定位精度测量技术,利用工业相机和图像处理软件对自动化设备工件台的重复定位精度进行测量,测量精度达到亚像素级。张岩等人[5]提出一种基于光学图像非线性局部特征匹配的2-DOF机器人手臂重复定位精度测量方法,具有非接触、高精度和易测量等优点。周飞[6]等人利用视觉系统测量线性模组在不同速度下的重复定位精度,实现了快速测量。张舒慧[7]等人将CCD相机应用于军用头盔显示器视差自动测量系统中,利用机器视觉测量了该系统中相机眼位点自动对准的横向及纵向重复定位精度。
小孔转轮(见图1)是某试验装置光路自动校准系统的关键器件,其上的滤波小孔用于准直光路通过,为光路提供定位基准。实验前通过调整转轮的角度偏差从而校准系统的光路,因此要求其具有较高的重复定位精度。
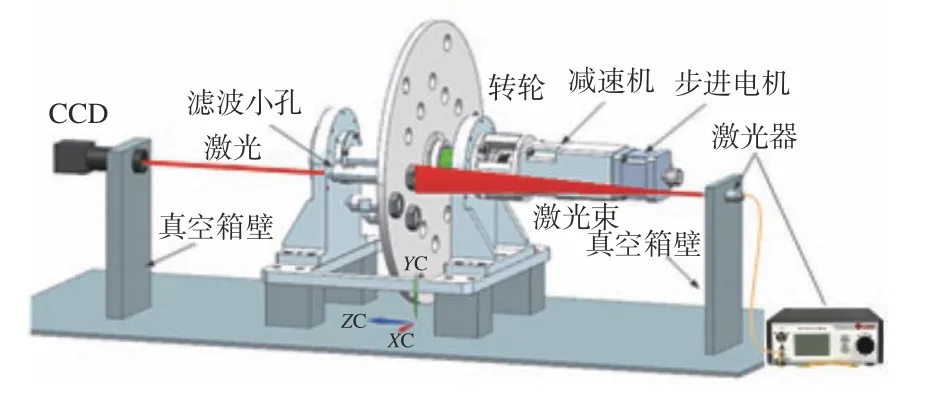
图1 测量系统组成Fig.1 Composition of measurement system
小孔转轮运行于真空环境,其驱动电机在真空下易受温升影响导致调节精度下降,因此必须通过大量的实验测量小孔转轮在真空环境下长时间运行的重复定位精度,以判断真空对小孔转轮的影响。在真空环境下,激光干涉仪等常用仪器无法对其进行测量,为此提出了一种基于激光和CCD结合的重复定位精度测量方法。该方法利用CCD采集通过转轮滤波小孔的激光光斑,并对其进行特征提取,计算光斑中心位置坐标,经多次测量和换算后得出小孔转轮重复定位精度。
1 测量方法与评价准则
1.1 测量方法
如图1所示,激光器和CCD分别安装在真空箱壁两侧,并使两者同轴,小孔转轮放置于真空箱内,使激光束垂直于转轮面并穿过滤波小孔,控制系统控制转轮转动,当转轮从某个位置运动到目标位置时激光穿过滤波小孔,在CCD上形成激光光斑,触发CCD采集图像,并将采集的图像进行处理得到光斑中心在图像上的位置坐标。
CCD选用Baumer的VCXG系列千兆网口230万像素黑白工业相机,其分辨率为1 920 pixel×1 200 pixel,像元尺寸5.86 μm×5.86 μm,镜头选用固定焦距C接口远心镜头,其光学放大倍率为1X,激光器选用具有1 053 nm的光纤光源。由于激光器和CCD的位置固定不变,CCD拍摄视场不变,在一定的范围内当转轮定位有偏差时,采集的光斑中心也会出现偏差,如图2所示。

图2 光斑中心偏差Fig.2 Angular deviation of laser spot center
则中心距(单位:mm)为

式中:(x,y)为光斑中心在图像上的像素位置坐标。角度偏差(单位:(°))为

式中:R1=86 mm。
1.2 重复定位精度评价准则
本文采用的测量方法是对一定角度下的滤波小孔光斑进行重复性测量,因此可以借鉴标准[8]的位置重复性计算方法对小孔转轮的重复定位精度进行评价。位置重复性表示对同一指令位置从同一方向重复响应n次后的实到位置的一致程度。
表示同一方向重复响应n次后测得所有光斑中心点的平均位置坐标。

di、分别表示单次测量光斑中心与平均值的位置偏差和所有光斑中心的平均位置偏差:

S表示位置偏差标准不确定度:
则小孔转轮位置重复性表示为

2 图像处理与分析
整个自动测量流程如图3所示。通过控制转轮正反往复运动,采集到位的光斑图像,进行图像处理与分析,获取精确的光斑中心坐标即可实现测量。
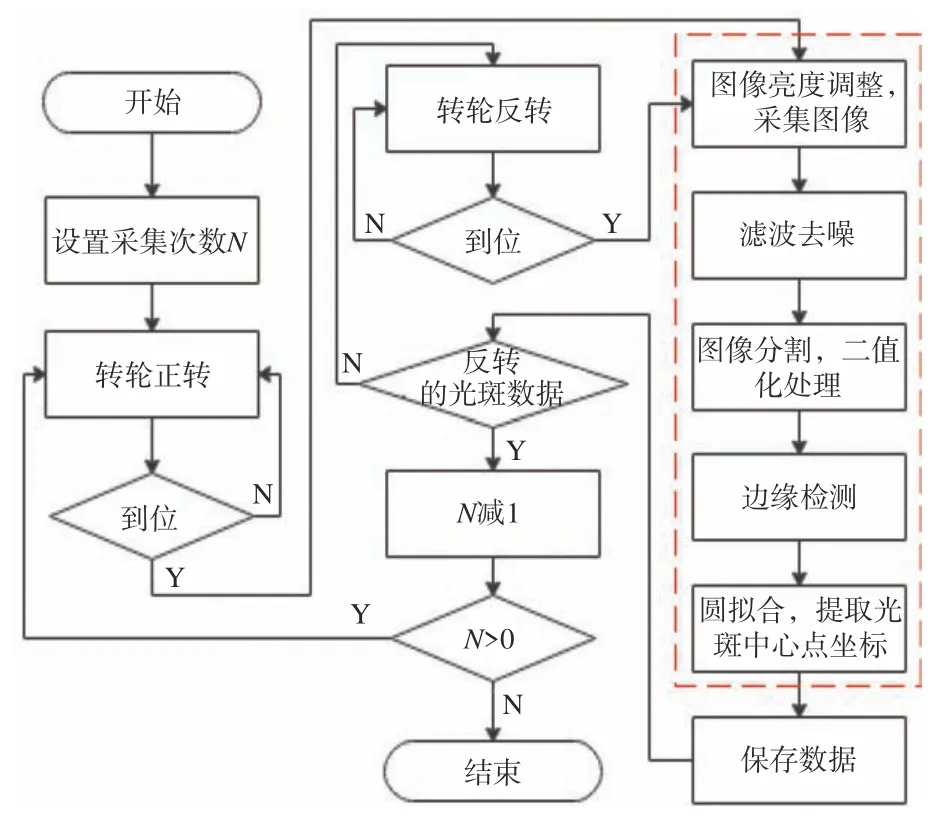
图3 自动测量流程Fig.3 Flow chart of automatic measurement
图像处理与分析是测量流程的关键环节,包含图像亮度调整、图像滤波去噪、图像分割、边缘检测、圆拟合共5个步骤,如图3中虚线框所示。
2.1 图像亮度调整
图像亮度受CCD曝光时间的影响比较大。在曝光时间较短时图像亮度暗,像素点灰度值较为接近,导致后续图像处理易把光斑部分边缘点滤掉,影响计算精度。因此必须根据实际环境情况调节合适的曝光时间,如图4所示为不同曝光时间下的图像亮度。
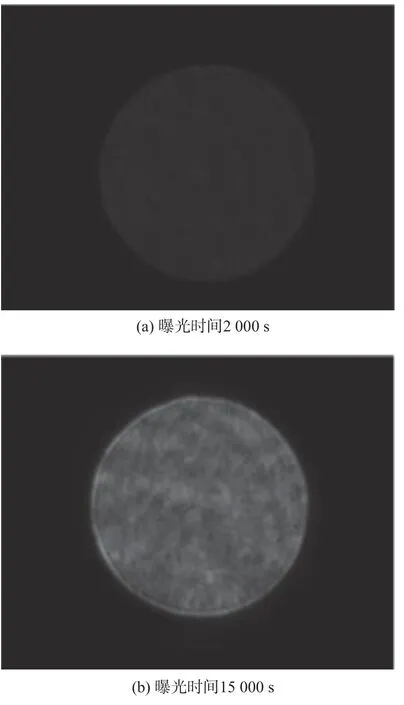
图4 不同曝光时间下的光斑亮度Fig.4 Laser spot brightness under different exposure time
2.2 滤波去噪
图像采集和传输过程中,通常会受到噪声干扰从而降低图像的质量。因此在图像处理中,通常需要对图像进行滤波处理,以消除噪声干扰,使图像像素点趋于平滑。常用的图像滤波方法有均值滤波、中值滤波、高斯滤波等[9-10]。本文采用高斯滤波对图像进行滤波处理。
高斯滤波就是对高斯函数进行离散化,以离散点上的高斯函数值作为权值,对采集到的灰度矩阵的每个像素点做一定范围的领域内的加权平均[11]。对图像处理,常采用二维零均值离散高斯函数作平滑滤波器,二维高斯函数如下:

利用GaussianBlur函数,选用9×9的高斯内核实现图像高斯滤波。
2.3 图像分割
激光本身存在的衍射、散射等现象,导致采集到的光斑图像边缘较为模糊,无法对图像进行有效分割处理,因此需要对图像进行二值化处理。图像二值化就是选取合适的阈值对图像像素点进行分割,使图像只含灰度值0和255,从而将目标物体和背景分开。设原图f(x,y)经过阈值T分割后,得到二值化图像g(x,y),即:

本文基于OTSU阈值分割法(最大类间方差法)计算图像阈值,进行二值化处理。OTSU算法是日本学者Otsu提出的一种寻找图像阈值的最大类间方差法,具有简单、稳定、有效等特点,其原理是以图像的灰度直方图为依据,利用目标和背景的类间方差最大作为阈值选取的准则[12-14]。
图像经OTSU阈值分割后,实现灰度图像转化为二值化图像,光斑处的像素点用像素值255替代,背景处的像素点用像素值0替代,如图5所示。

图5 二值化图像Fig.5 Binary image
2.4 边缘检测
图像二值化后,需要将图像目标物体和背景间的边缘像素点提取出来。由于图像相邻像素灰度值不同,在其相邻区域间会存在不连续性,所以通过对图像的各像素点进行求微分或者二阶微分可以检测出边缘位置。常用的激光光斑边缘检测算子有:Roberts算子、Prewitt算子、sobel算子、Gaussion-Laplace算子、Canny算子,前三者基于一阶微分,计算简单,但抗噪性能差,Canny算子基于二阶微分,定位精确,单边缘响应,具有较高的信噪比[15]。本文利用Canny函数对二值化后的光斑图像进行边缘检测,得到的边缘图像如图6所示。
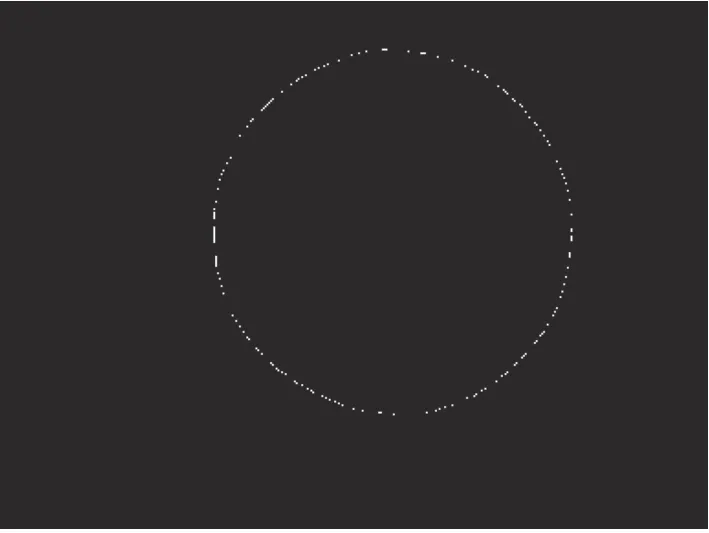
图6 边缘检测图像Fig.6 Edge detection image
2.5 圆拟合
由于激光光斑边缘近似于圆,根据最小二乘原理,用圆来逼近光斑轮廓实现圆拟合,从而计算光斑中心[16-17]。以边缘检测图像的左上角为坐标原点,建立如图7所示的x-y坐标系。
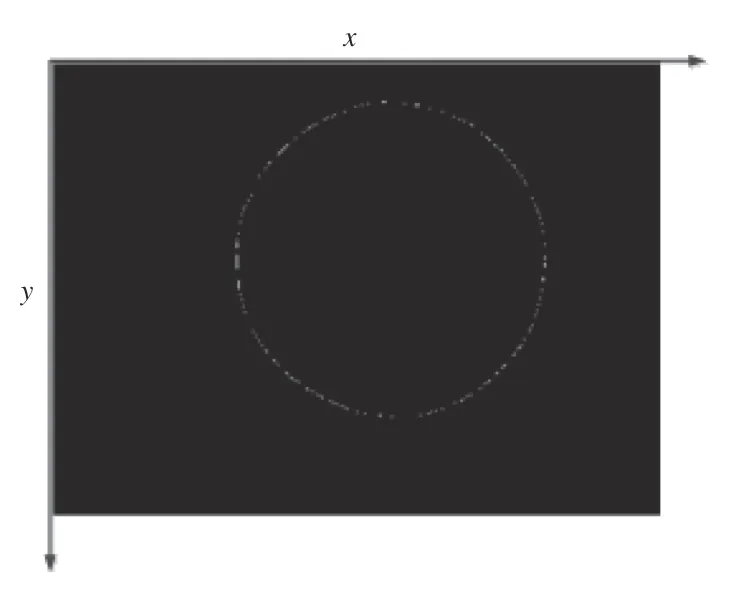
图7 建立坐标系Fig.7 Establishment of coordinate system
在该坐标系下,x∈[ 0,Image.Cols],y∈[0,Image.Rows],边缘像素点坐标为(xi,yi),则圆的方程表示为

取残差为

残差平方和为

由最小二乘原理可得:

即:
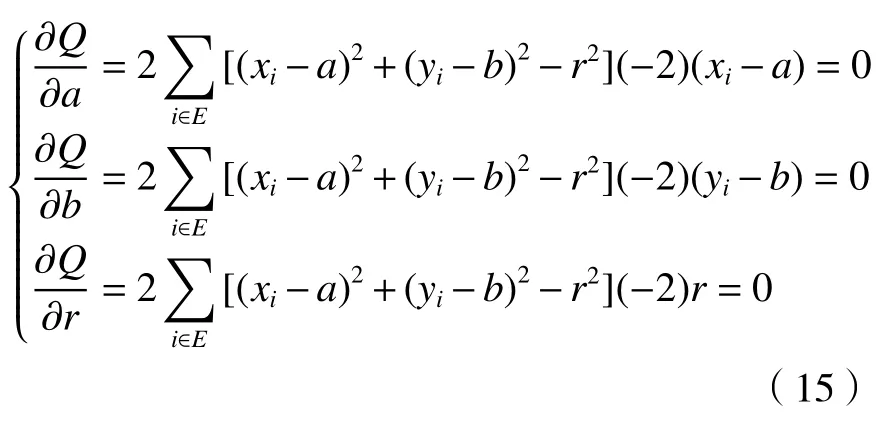
将上式整理得:

式中各参数可用下式表示:

消除a、b、r的二次项后整理得:

由圆的方程和上式可推出圆的各参数为
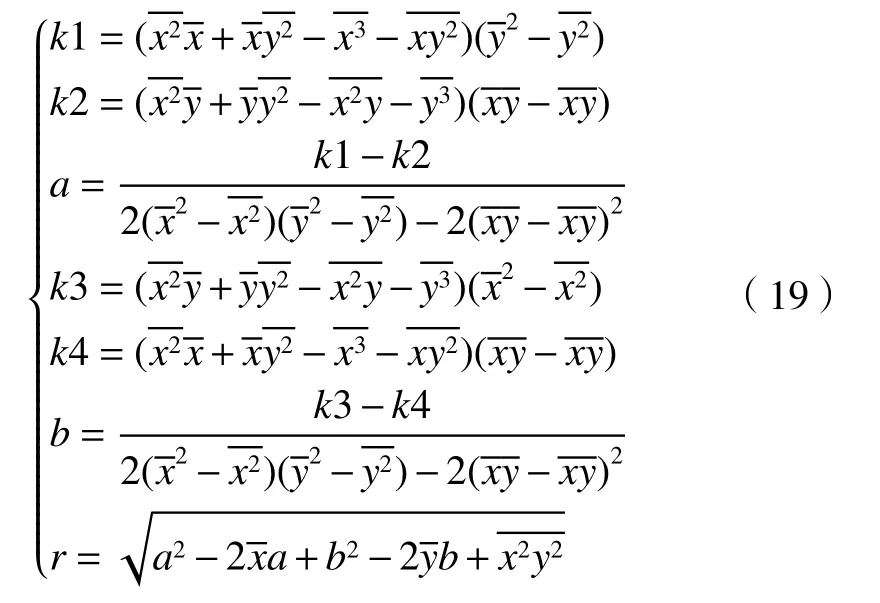
利用基于最小二乘的圆拟合算法得到某次光斑的中心和半径,如图8所示。
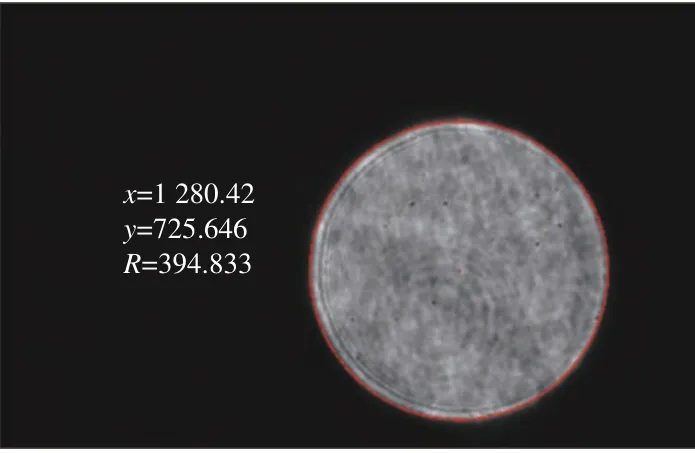
图8 圆拟合计算结果Fig.8 Calculation results of circle fitting
3 实验
3.1 精度对比实验
为了验证该测量方法的有效性,真空外用激光干涉仪和该测量方法进行了对比。激光干涉仪测量系统包含激光干涉仪、XR20-W回转校准装置、光学镜组、笔记本等,如图9所示。回转轴测量精度可达±1″。

图9 小孔转轮实验平台Fig.9 Experimental platform of pinhole runner
控制小孔转轮转动角度约1°,用激光干涉仪测量转动前后的角度,同时用CCD采集转动前后的光斑图像计算光斑中心,如图10所示。
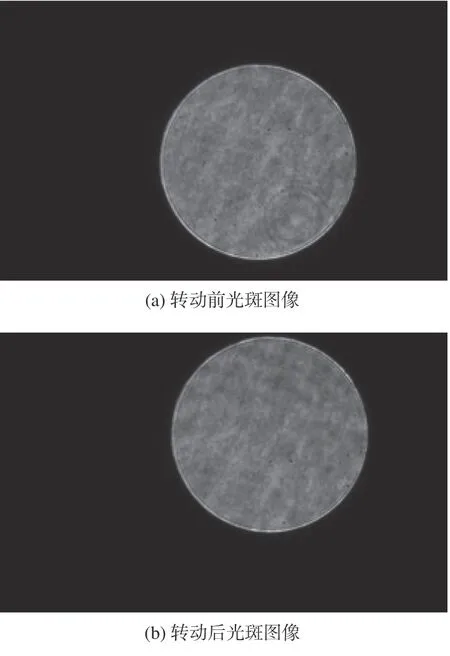
图10 转动前后图像Fig.10 Image before and after rotation
在CCD的视野范围内测量多组数据,如表1、表2所示,将该方法测量结果换算成角度偏差后,两者测量结果相差约为11″,而小孔转轮重复定位精度要求≤24″。通过对比,表明该方法具有较高的检测精度,满足使用要求。

表1 激光干涉仪测量结果Table 1 Measurement results of laser interferometer(°)

表2 激光和CCD组合测量结果Table 2 Measurement results of laser and CCD
3.2 位置重复性测定实验
将真空箱盖板合上,用真空泵将真空箱内的压强抽至5.0E-4 Pa,控制小孔转轮正反2个方向往复运动60次(连续运行约6 h),采集图像计算光斑中心,坐标分布如图11所示。正反向单次测量光斑中心与平均值的位置偏差如图12和图13所示。

图11 光斑中心分布Fig.11 Distribution of laser spot center
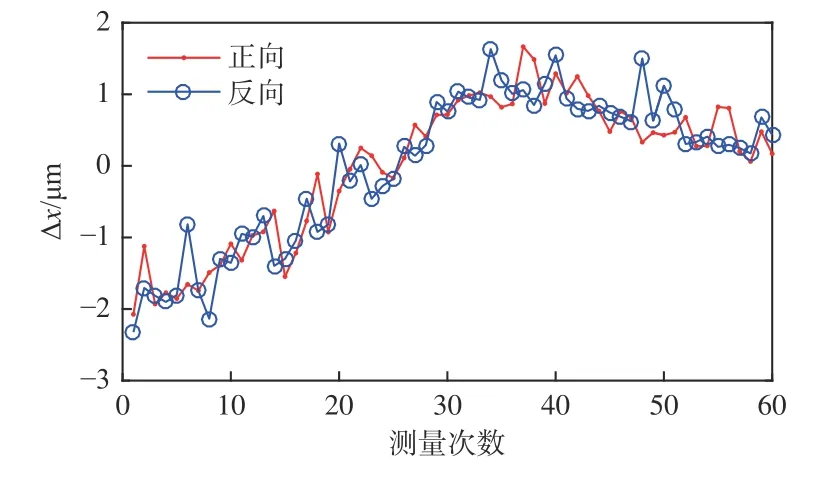
图12 光斑中心x位置偏差Fig.12 X position deviation of laser spot center

图13 光斑中心y位置偏差Fig.13 Y position deviation of laser spot center
位置偏差标准不确定度:S↑= 0.37 μm,S↓=0.46 μm。
位置重复性:R↑= 2.33 μm,R↓ =2.63 μm;换算成角度,则R↑= 2.78″,R↓ =3.16″。
4 结论
本文结合真空环境下小孔转轮的重复定位精度检测需求,提出将激光和CCD结合使用,以位置重复性作为重复定位精度评价指标的检测方法,并给出了测量系统组成方案及位置重复性计算方法。同时,为了获取精确的光斑中心坐标,采取了图像亮度调整、图像高斯滤波去噪、图像二值化处理、Canny边缘检测、最小二乘圆拟合等方法对光斑图像进行处理。最后,将该测量方法与相同条件下的激光干涉仪的检测数据进行了比较,并应用于实际实验中,对真空环境下的小孔转轮进行了近6 h正反往复各60次的测量。结果表明,该测量方法具有较高的测量精度,能够有效测量真空环境下小孔转轮的重复定位精度。该测量方法解决了真空环境下小孔转轮重复定位精度测量问题,也为类似的测量提供了经验参考。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
——“AABC”和“无X无X”式词语
小学生学习指导(中年级)(2021年3期)2021-04-06
少儿美术(快乐历史地理)(2020年8期)2021-01-04
中学生数理化·八年级物理人教版(2019年10期)2019-11-25
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
制造技术与机床(2019年9期)2019-09-10
小猕猴学习画刊(2017年3期)2017-07-19
兰台世界(2017年12期)2017-06-22
中国医疗美容(2015年1期)2015-07-12
