
通用工业相机的炸点瞬时位置测量模拟研究
2021-09-27 02:48黄战华曹雨生张晗笑申苜弘
应用光学 2021年5期
黄战华,张 光,曹雨生,张晗笑,申苜弘
(1.天津大学 精密仪器与光电子工程学院,光电信息技术教育部重点实验室,天津 300072)
引言
模拟测试是生产各种新型武器系统的关键一环[1]。对于火炮弹丸,其何时起爆由引信决定[2],因此对炸点空间位置测量技术的研究有利于提高引信技术,进一步提高打击准确度。炸点坐标测量分为地面炸点坐标测量和空中炸点坐标测量[3]。早期,对炸点位置测量一般采用人工观察法,该方法随机误差大且安全性差,因此需要研制新型光电测试系统[4-6]。对于当前已存在的测量系统,成本高而且容易受到测量环境的限制[7]。炸点空间坐标探测常用的测量方法有激光测距测高仪[8]、激光电测法[9]、多光幕交汇测量法[10]以及声学测量法[11-12]等。
由于炮弹速度非常快,并且其火光维持的时间只有几毫秒,因此具有高速性和瞬时性。相机一般分为卷帘快门[13]和全局快门[14]两种相机,全局快门的曝光时间更短,适合拍摄速度较大物体;而卷帘式快门帧速更高,但会出现“果冻现象”和“晃动现象”。由于高速相机价格昂贵,所以进行了基于通用工业相机的炸点瞬时位置测量的模拟研究。
1 测量原理
2个相机中心之间的距离远小于测量距离,因此可以把2个相机的光轴看成是近似平行的。测量原理主要是基于双目平行光轴测量模型,如图1。左右2个相机相对位置固定,并同时曝光,再根据目标在左右图像中的坐标,即可获取目标的空间坐标。图中HS表示2个相机的间距,LT表示炸点到相机的深度距离,炸点在左右相机的测量角为 βL和 βR,约定光轴左侧为负,光轴右侧为正,炸点对 两 相机测 量 单元的 张 角为 θT, 则 θT与 βL和 βR的关系为(1):

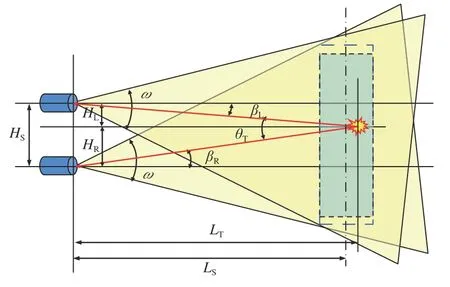
图1 平行光轴测距模型Fig.1 Parallel optical axis ranging model
根据图1,有关系(2)式和(3)式:


HS与LT的关系为(4)式:

由(2)、(3)、(4)式可得(5)式,即炸点到2个相机连线的深度距离LT也 是炸点沿Z方向坐标。

根据(2)、(3)和(5)式可以得出(6)、(7)式:
根据物像关系分别得到炸点沿X、Y方向的坐标,即(8)式与(9)式:
式中:HS已 知; (xL,yL) 与 (xR,yR)YL′是炸点在左右图像中位置坐标; (X,Y,Z)即为炸点空间位置坐标。
2 实现方案
系统主要由瞬态闪光单元、探测传感单元和信号处理单元组成。瞬态闪光单元通过短脉冲控制器驱动LED按固定频率亮灭来模拟弹丸的爆炸发光,探测传感单元用于捕捉产生的光信号,通过信号处理单元,触发相机曝光采集。
2.1 瞬态闪光单元
该单元包含4个LED灯,均匀分布在直径1.2 m的圆周上,各LED的相对位置固定,其距离变化小于0.5 mm,满足精度要求。系统时钟周期在16 ms~48 ms可调,当CLK信号由低变高,LED的驱动电平也由低变高,时序如图2所示。发光时间需依据探测视场内的背景光强度以及测量的深度距离而定,本系统中,每个LED的持续发光的时间为2 ms。
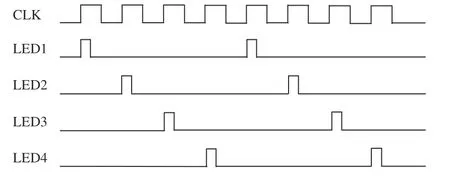
图2 闪光控制器时序图Fig.2 Timing diagram of flash controller
2.2 闪光信号起始探测传感单元
系统采用感光面大小为(1 0×10)mm的硅光敏二极管,光谱响应范围为300 nm至1 000 nm,并在二极管前方增加光学透镜,使炸点闪光信号汇聚到感光面,使其能够触发相机采集图像。信号处理过程如图3所示:光敏二极管将光信号转为电信号,再将电流信号VINZ经AD862转换为电压信号VOS;然后将VOS进行滤波放大,得到输出信号VOUT。

图3 光电探测模块电路图Fig.3 Circuit diagram of photoelectric detection module
2.3 相机曝光时序控制
将VOUT信号传至减法电路模块即图4中VINA信号,将背景光信号滤掉并放大,得到有效信号VOPPA。VOPPA信号分为两路相同的信号:一部分进入比较器,与启动阈值VREFS比较,确定是否开始积分充电;一部分进入积分控制电路,经过ADG787之后,输出信号VPPSA,通过AD8625得到信号VOJFA,进入比较器再与曝光停止阈值VREFE比较,确定是否停止曝光,如图5所示。
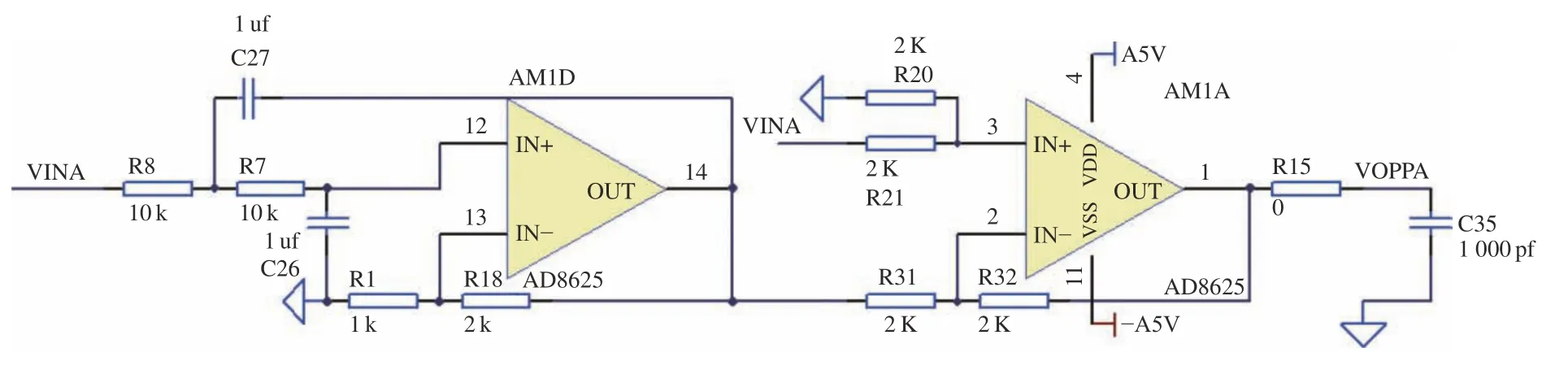
图4 减法电路图Fig.4 Subtraction circuit diagram
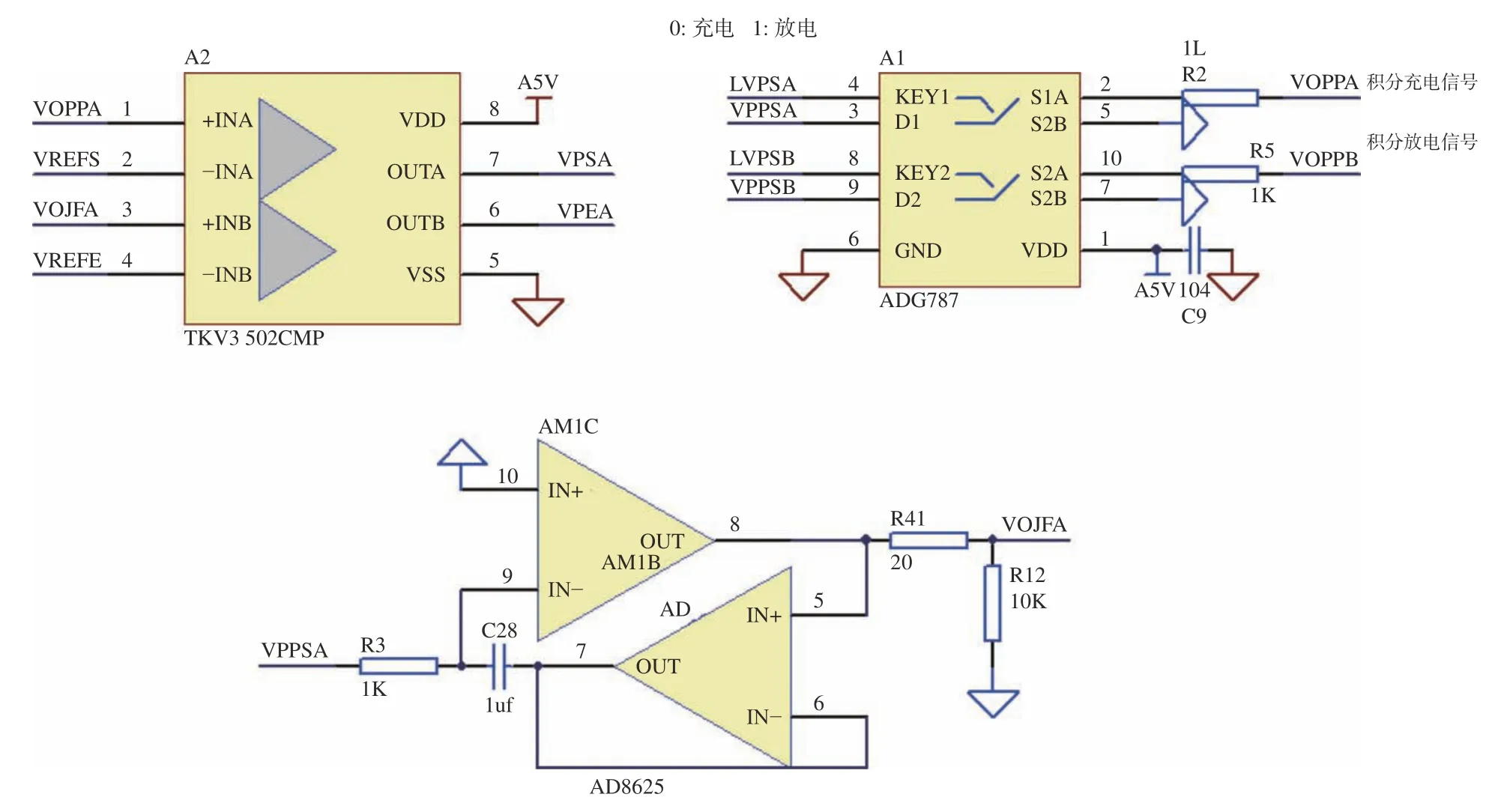
图5 相机曝光控制电路图Fig.5 Circuit diagram of camera exposure control
3 实验与数据分析
为保证测量的准确性与可靠性,进行了系统前置实验。爆炸信号属于高频信号,而测量环境中信号为低频信号,因此需通过滤波电路对有效信号进行提取,防止误触发或不触发相机曝光。图6所示为调整参数之后噪声与有效信号的幅值。
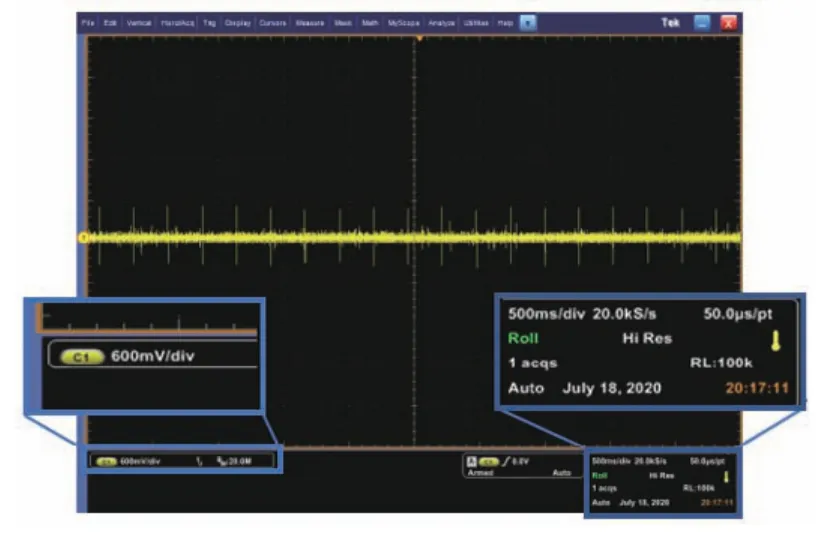
图6 调整之后噪声与爆炸信号的幅值Fig.6 Amplitude of noise and explosion signal after adjustment
3.1 光斑提取
首先对图7所示原始图像进行中值滤波,滤除固有的椒盐噪声,得到图8;然后进行二值化处理,滤除视场内其他光源背景的干扰,获得图9;接着通过腐蚀和膨胀技术获取炸点光斑的掩码,分别如图10、图11、图12所示。

图7 原始图像Fig.7 Original image

图8 中值滤波后的图像Fig.8 Image after median filtering

图9 二值化后图像Fig.9 Image after binarization
图10 腐蚀后图像Fig.10 Image after corrosion

图11 膨胀后图像Fig.11 Image after expansion

图12 光斑掩码图像Fig.12 Spot mask image
3.2 光斑中心定位
由于爆炸光信号形状任意,且光能量分布不均,因此光斑质心与几何中心会产生偏移。该系统采用平方加权灰度重心法[15]对图12中的光斑进行中心定位。计算公式为(10)式和(11)式,式中: (x,y)为图像中对应像素点的实际尺寸坐标;f(x,y)f(x,y)表示对应位置的灰度值;M×N表示区域大小;xC与yC为光斑中心横纵坐标。

3.3 数据分析
以2个相机之间连线的中点作为参考零点,将目标分别沿深度方向Z置于距离探测系统24 m、32 m、48 m处,在水平方向X范围−8 m~8 m内以2 m距离为间隔设置测量点,在竖直方向Y保持0.4 mm不变。在24 m、32 mm、48 mm处,炸点坐标(X,Y,Z)测量结果分别如表1、2、3所示。
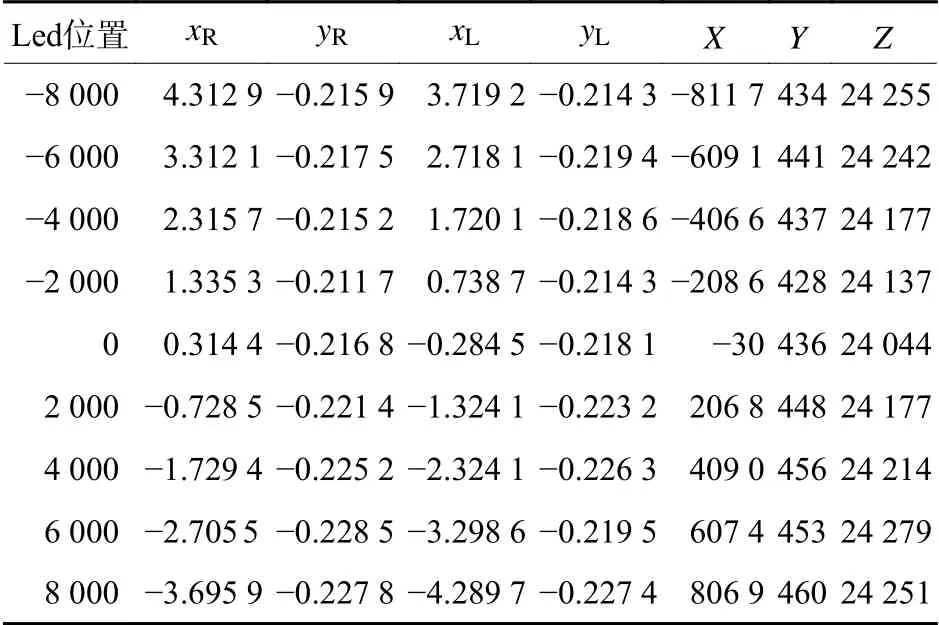
表1 24 m处测量结果Table 1 Measurement results at 24 m mm
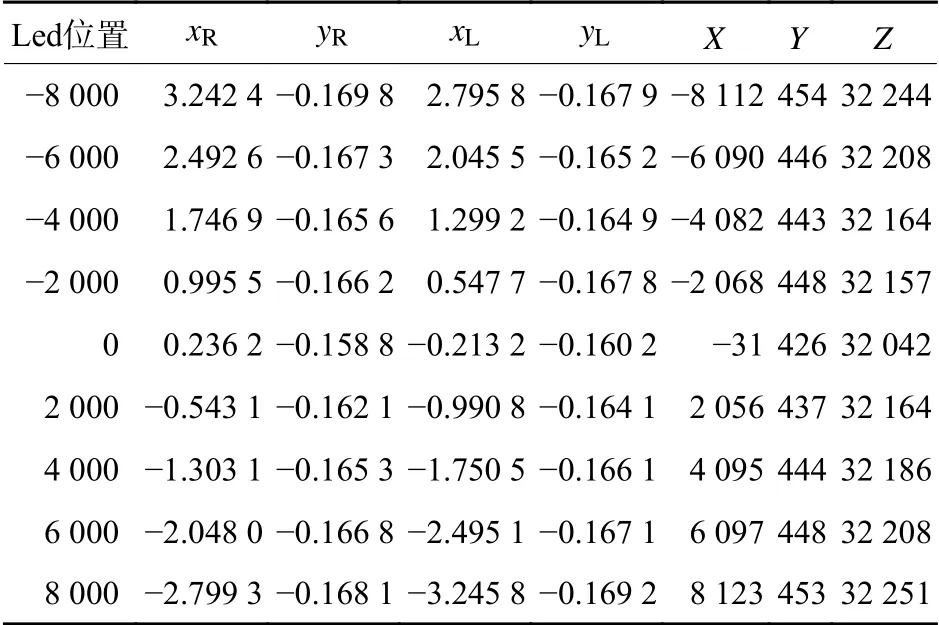
表2 32 m处测量结果Table 2 Measurement results at 32 m mm
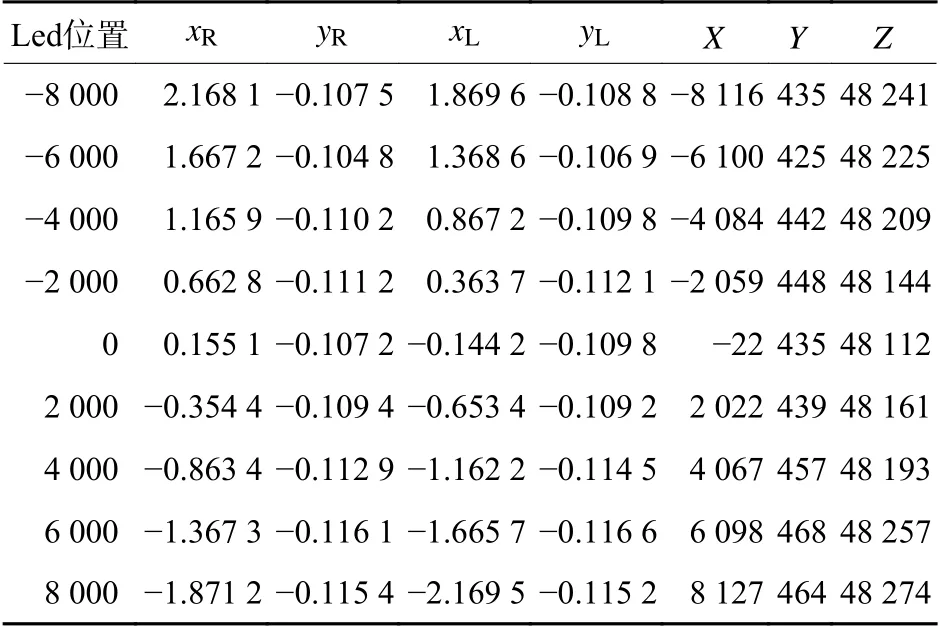
表3 48 m处测量结果Table 3 Measurement results at 48 m mm
根据公式(12)、(13)、(14),式中下标th表示理论值,ac表示测量值,在3个不同深度距离,分别对X、Y、Z计算误差绝对值。


综上所述,最大误差绝对值:在深度距离24 m处,X方向为117 mm,Y方向为59 mm,Z方向为279 mm;在32 m处,X方向为123 mm,Y方向为54 mm,Z方向为251 mm;在48 m处,X方向为127 mm,Y方向为68 mm,Z方向为274 mm。
4 结论
本文对炸点空间位置的探测进行了模拟研究,提出了一种基于光电传感器和普通工业相机的炸点空间位置探测系统,最终实验结果表明该系统满足探测精度要求,具有重要的实际应用价值,但是对于实际弹丸炸点的空间位置测量还需进一步实验。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
兵器装备工程学报(2020年5期)2020-06-07
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
成都信息工程大学学报(2019年6期)2019-08-13
中国医疗美容(2015年1期)2015-07-12
应用光学(2014年3期)2014-06-01
应用光学(2014年6期)2014-03-27
