
基于FPGA的战术数据链带优先级的轮询接入控制系统研究
2021-09-24 05:32尧跃华梁竹关杨志军丁洪伟柳虔林
现代电子技术 2021年17期
尧跃华,梁竹关,李 博,杨志军,丁洪伟,柳虔林
(1.云南大学 信息学院,云南 昆明 650091;2.云南省教育厅 教学仪器装备中心,云南 昆明 650223;3.云南省军区,云南 昆明 650051)
0 引 言
战术数据链是一种信息传输和处理系统[1⁃2],可以链接无线传感器、火控雷达、通信器等终端设备,进行信息共享和协同作战[3],采用轮询控制协议控制信息处理和传输[4],可提升部队作战效率,轮询控制协议的数学模型作为一类经典通信模型,被广泛应用于通信[5⁃6]和计算机网络[7⁃8]。模型被分为三类,分别是完全服务[9]、门限服务[10]和限定K(K=1)服务[11]轮询控制策略模型,三类基本模型优化和改进形成各种新的轮询模型。
本文提出战术数据链离散时间区分优先级的轮询接入控制协议(DPACP),能有效区分主控站和从属站,对两类站点的报文进行区别处理和转发,使数据链能更好地满足战争时不同部队对作战信息的需求。采用现场可编程逻辑电路(FPGA)作为实现平台,应用QuartusⅡ作为设计平台,验证本轮询模型用在战术数据链的可行性,并统计平均排队队长和平均排队等待时间。
1 DPACP模型
模型由一个主控站和多个从属站构成,主控站在战术数据链中位于较为重要的位置,兼具收集和转发数据的功能,主控站本身收集的报文区分为高优先级,从属站需要转发的报文区分为低优先级。相较于门限和限定服务,完全服务虽公平性较差,但平均等待时延却是最短的[12],故主控站和从属站都采用完全服务。在逻辑中心控制下,只要主控站有需要处理和发送的报文,系统就转向服务主控站的报文,服务完主控站的报文,系统才转向服务一个从属站的报文,服务完这个从属站的报文,系统又转向服务主控站的报文,服务完主控站的报文,系统又转向服务下一个从属站的报文,如图1所示。
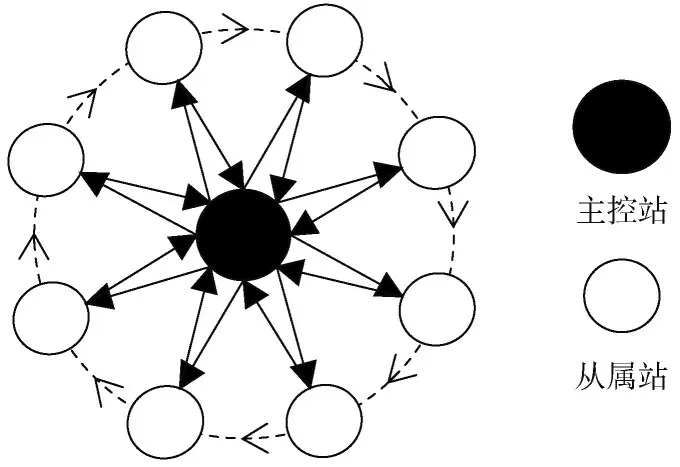
图1 协议模型
1.1 假设条件
采用离散时间,设系统由1个主控站和N个从属站构成,主控站中排队等待处理和发送的报文用中心队列h表示,第i(i=1,2,…,N)个从属站中那些排队等待处理和发送的报文用普通队列i(i=1,2,…,N)表示,λ为普通队列报文的到达率,β为普通队列一个报文的服务时间,λh为中心队列报文的到达率,βh为中心队列一个报文的服务时间,r为不同队列之间查询转换时间,建立的DPACP数学模型假设工作条件[13]如下:
1)对每个普通队列i(i=1,2,…,N),其报文到达过程、服务一个报文所用时间、任一个时隙内到达的报文以及服务过程到达的报文进行完全服务所需时间,都服从相互独立、相同分布的概率分布。
2)普通队列i(i=1,2,…,N)报文到达过程的母函数、均值和方差为A(z),λ=A′(1)和。中心队列h为Ah(z),λh=A′h(1)和。
3)服务一个报文所用时间的母函数、均值和方差为B(z),β=B′(1)和,中心队列h为Bh(z),βh=Bh(1)和。
4)中心队列与普通队列、普通队列与普通队列之间的查询转换时间随机变量的母函数、均值和方差分别为R(z),r=R″(1)和。
5)完全服务一个普通队列i(i=1,2,…,N)所需时间的概率母函数为F(z),中心队列为Fh(z)。
6)储存空间足够大,能存储下所有报文。
7)服务每一个队列的报文,对先到达的报文先进行服务,后到达的报文后进行服务。
系统的状态采用嵌入式马尔可夫链进行描述,该马尔可夫链是各态遍历的和非周期的。
1.2 性能分析
系统在满足以下条件时达到稳态:

达到稳态时系统的概率母函数[13]为:
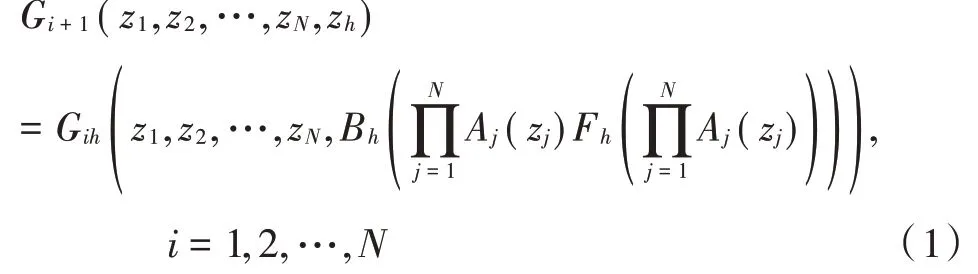
由概率母函数求一阶导和二阶导,可得平均排队队长和平均等待时间[13]。
1)普通队列和中心队列的平均排队队长
2)普通队列和中心队列的平均排队等待时间

1.3 数值计算和仿真分析
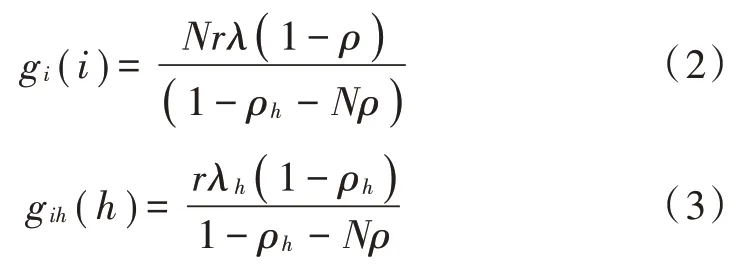
设置工作条件:各普通队列参数是对称分布的;到达时间、查询转换时间和等待服务时间单位为时隙;普通队列i和中心队列在任一时隙到达报文数服从Poisson分布。根据设置工作条件,应用Matlab平台,得到图2,图3数值计算和仿真验证结果。
从图2和图3可以得到以下结论:中心队列报文平均排队等待服务时间和平均排队队长远小于普通队列;普通队列报文平均排队等待服务时间和平均排队队长比不区分优先级完全服务轮询模型还要稍微小一些。

图2 平均排队队长与到达率关系
图3 平均等待时间与到达率关系
2 电路设计与验证仿真
根据DPACP模型,以战术数据链中7个从属站(即N=7)和1个主控站为例,为主控站和从属站分别配置FIFO,设计基于FPGA的DPACP轮询控制系统功能模块结构,如图4所示。

图4 系统结构示意图
2.1 轮询控制模块
轮询控制模块是整个设计的核心部分,服务顺序和服务策略分别存储于各自相应的存储器。
1)系统初始化后,首先从服务顺序存储器取出主控站地址,在服务策略控制下,服务主控站的报文直到其为空;
2)从服务顺序存储器取出从属站1的地址,在服务策略控制下,服务从属站的报文直到其为空;
3)从服务顺序存储器中取出主控站地址,在服务策略控制下,服务主控站的报文直到其为空;
4)从服务顺序存储器中取出从属站2的地址,在服务策略控制下,服务从属站的报文直到其为空;
5)从服务顺序存储器中取出主控站地址,在服务策略控制下,服务主控站的报文直到其为空;
6)从服务顺序存储器取出从属站7的地址,在服务策略控制下,服务从属站的报文直到其为空,此时系统完成一轮查询服务周期,如图5所示。

图5 控制模块状态转换图
2.2 顶层设计与仿真验证
采用Verilog语言,基于Altera 公司的FPGA,应用QuartersⅡ9.1对设计的电路系统进行仿真验证,系统的仿真条件为:时钟频率为100 MHz;信号源为服从Poisson分布的伪随机数;满足稳态条件,使系统不超载。
仿真结果如图6所示。

图6 八站点轮询控制时序图
图6中:data0是主控站发送的报文,data1~data7是从属站发送的报文;q0~q7是接收的报文;out是总线,其中00表示没有数据到达;rst是复位信号端;clk是时钟信号。从仿真结果看,发送的报文和接收的报文完全一致,仅存在着一定时间的延时。在系统轮询周期开始时,主控站有报文到达,系统开始服务主控站,服务完主控站的报文,再去服务一个有报文的从属站,服务完该从属站的报文后,系统转向服务主控站,服务完主控站的报文,系统又转向服务下一个有报文的从属站,直到服务完最后一个有报文的从属站。这与本文设计的DPACP模型服务方式一致,说明应用FPGA设计的系统实现了DPACP模型的控制方式。
2.3 统计分析
根据系统模型,应用式(6)~式(9)统计主控站和从属站的平均排队队长和平均排队等待服务时间。
主控站平均排队队长统计:

从属站平均排队队长统计:

主控站平均排队等待服务时间统计:

从属站平均排队等待服务时间统计:

式中:nc为系统轮询次数;lh(i)为第i次轮询时,主控站中等待发送的报文数;l(i)是第i次轮询时,从属站中等待发送的报文数目;wh(j)为主控站第j个报文的等待时间;M h为主控站报文总数;w(j)为从属站第j个报文的等待时间;M为从属站报文总数。根据式(6)~式(9),得到数据统计值并与理论值进行比较,如表1所示,其中,tm为系统运行时间,g,gh,w,wh是理论值,是统计值。

表1 理论值与统计值对比
从表1来看,优先级高的主控站,理论值和统计值的平均排队队长明显少于不是优先级的从属站,理论值和统计值的平均排队等待时间也明显少于不是优先级的从属站,且随着运行时间的增加,统计值越来越趋近于理论值。
3 结 语
本文分析现有战术数据链中应用传统轮询模型控制协议的不足,提出了离散时间带优先级的轮询接入控制协议(DPACP),并使用FPGA进行设计。通过仿真验证和统计分析,结果表明离散时间带优先级的轮询接入控制协议(DPACP)相较于基本轮询模型接入控制协议确实能有效缩短主控站和从属站报文平均排队队长和平均排队等待服务时间,保证重要站点数据链通信快速响应,并且缩短了站点传输时间,降低了站点能耗,证明了该设计的可行性。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
北京航空航天大学学报(2019年9期)2019-10-26
计算机与数字工程(2019年2期)2019-02-28
军营文化天地(2018年2期)2018-12-15
北京航空航天大学学报(2017年3期)2017-11-23
产品可靠性报告(2017年7期)2017-09-05
自动化学报(2016年8期)2016-04-16
