
捡拾输送集草机设计与试验研究*
2021-09-23 14:05张丽张宁孟玉刚包德胜郭喜燕王聪伟
中国农机化学报 2021年9期
张丽,张宁,孟玉刚,包德胜,郭喜燕,王聪伟
(中国农业机械化科学研究院呼和浩特分院有限公司,呼和浩特市,010010)
0 引言
随着我国“粮改饲”农业结构调整的深入推进,饲草料种植规模逐渐加大,产业迅速发展。随之,对饲草料收获机具的需求也日益增加。搂草机是传统的牧草收获机具之一[1]。目前国内外广泛采用的是指轮式搂草机和水平旋转搂草机[2]。国外指轮式搂草机代表性的机型有约翰迪尔WR10系列搂草机、法国库恩SR100GⅡ/SR300/SR600GⅡ系列快速搂草机、凯斯—纽荷兰WR、WRX系列指轮式搂草机,水平旋转搂草机典型机型有法国库恩GA系列搂草机、德国CLASS公司LINER系列搂草机[3]。国外机型种类较多,系列化程度高,自动化水平高,电、液控制系统技术成熟[4]。国内有刘建福、李正阳、贾红超等人研发的指轮式搂草机[5],李明珍、杜韧研发的水平旋转搂草机[6-7]以及中国农机院呼和浩特分院研发的指轮式搂草机和5.3/6.0型水平旋转搂草机[8-9]。国内搂草机系列化程度低、地面仿形功能较差,设备的可靠性较低,收集后的牧草花叶损失较多,牧草营养价值较低。
针对我国牧草搂集技术现状以及市场需求,中国农机院呼和浩特分院在“十三五”国家重点研发计划项目中研制了一种新型的牧草收集机具——9JSC-7.0型捡拾输送集草机,其优点在于对草皮的破坏小、牧草的花叶损失少,最大程度保持牧草的营养价值,其强大的地面仿形功能可随地面起伏。
1 总体结构及工作原理
1.1 总体结构
9JSC-7.0型捡拾输送集草机由机架、左(右)侧输送机构、左(右)侧捡拾机构、行走轮、仿形浮动机构、液压系统、左(右)挡草板以及滑掌等组成。总体结构如图1所示。机架上装有升降油缸、折叠油缸等,从上往下看机架呈T型布置[10]。左、右侧输送机构分别置于机架两侧,左、右侧捡拾机构分别位于左、右侧输送机构前方,仿形浮动机构挂接在左、右侧输送机构的底部,保证机器对地面的仿形功能和减震能力。滑掌安装于捡拾机构后面下端,防止捡拾器与地面硬性接触,可对捡拾机构起到保护作用。机架与拖拉机挂接,拖拉机动力输出轴与液压泵连接,液压泵带动整个液压系统运行。

(a) 轴侧图
9JSC-7.0型捡拾输送集草机的主要技术参数,如表1所示。
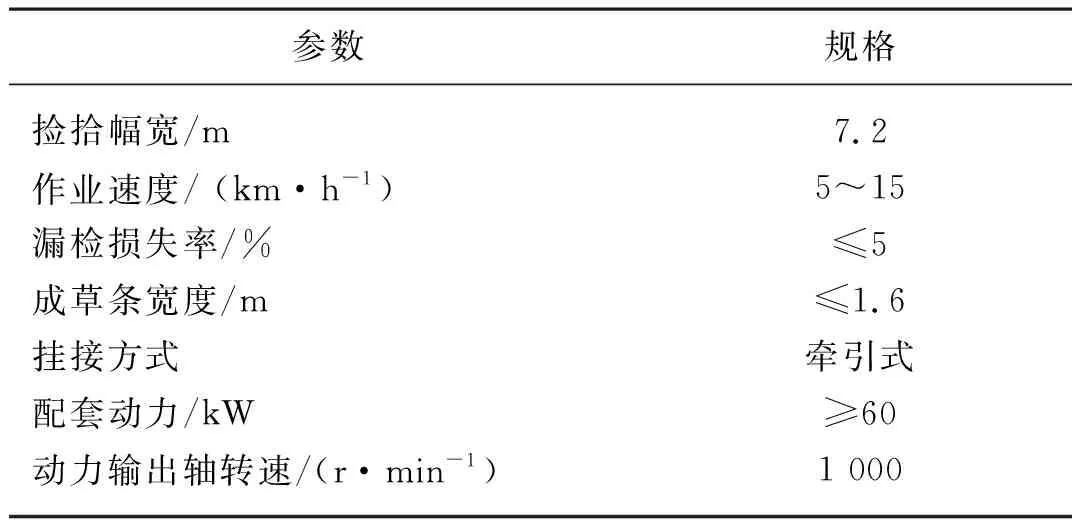
表1 9JSC-7.0型捡拾输送集草机主要技术参数Tab. 1 Major technical parameters of grass picking and collecting machine
1.2 工作原理
作业时,拖拉机与机器牵引架挂接,拖拉机动力输出通过PTO轴与液压泵连接,为整个机器提供动力,拖拉机牵引机器前进。左、右捡拾马达驱动左、右捡拾机构,将铺放在田间的牧草捡拾,分别抛至左、右两侧输送机构,液压马达驱动输送机构,将牧草输送至所需侧,形成蓬松的草条。仿形浮动机构随起伏不平的地面实现对地面的仿形。工作完毕后,通过液压系统使捡拾机构和输送机构升起,立于支撑架上方两侧,且基本与轮胎同宽,达到运输状态,保证运输安全,如图2所示。
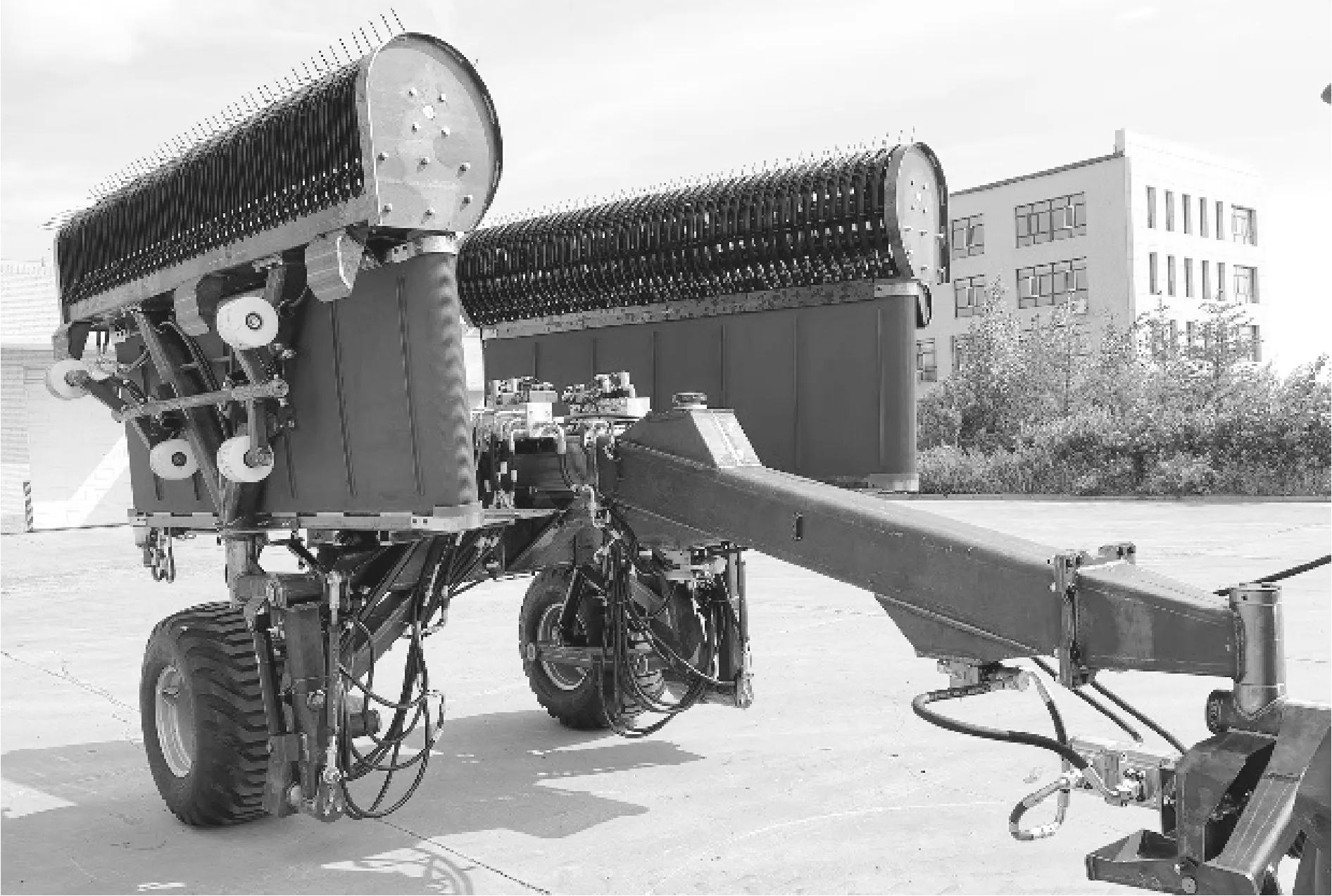
图2 运输状态
2 主要工作部件设计
2.1 机架设计
机架由牵引架、中间梁、悬挂架、右转架以及左转架等组成,如图3所示。牵引架与拖拉机挂接,中间梁上装有液压油箱,悬挂架与行走轮连接,通过行走轮悬挂油缸调节行走轮的高度。左转架、右转架分别与左、右输送捡拾机构连接,通过横向旋转油缸和纵向折叠油缸实现输送捡拾机构水平旋转和垂直方向的折叠。

图3 机架
2.2 捡拾机构设计
捡拾机构的结构和性能应满足如下牧草收获工艺要求:草条要捡拾干净,捡拾损失率一般不应大于5%,捡拾起来的物料中陈草及其他杂质要少。弹齿对牧草的打击要轻,牧草花、叶的损失少,要具有良好的地面仿形和缓冲性能。当草条被捡拾提升到护板、弹齿收缩到护板内部时,弹齿不应拖带牧草[11]。
集草机上捡拾机构的结构型式是弹齿滚筒式,它主要由捡拾马达、捡拾器侧板、弹齿、弹齿护圈、捡拾器横梁、弹齿梁和捡拾器轴等组成,如图4所示。与方草捆捡拾压捆机[11]上的捡拾器结构相比,该捡拾机构没有凸轮盘。捡拾马达驱动捡拾器轴旋转,从而带动弹齿捡拾草条并将草条抛送到输送机构上[12]。

图4 捡拾机构
捡拾机构的基本参数有捡拾幅宽、弹齿杆数量和弹齿齿端线速度。据有关资料,割草机和切割压扁机等收获后铺放的草条宽度为1.2~2.4 m[13],捡拾幅宽应大于草条宽度,本集草机选择一侧捡拾机构的捡拾幅宽为2.7 m,既降低了牧草在捡拾机构两侧的漏检率,又提高了捡拾机构的适用范围。
机器作业速度一般小于或等于捡拾器弹齿端点的线速度[2],弹齿在捡拾牧草时理论上作匀速圆周运动,其线速度
(1)
式中:V——弹齿的线速度,m/s;
R——弹齿端点回转半径,选择R=317 mm;
N——捡拾机构滚筒转速,r/min。
取集草机的作业速度v=6.48 km/h=1.8 m/s,弹齿线的速度

弹齿齿端线速度
2.3 输送机构
输送机构位于捡拾机构后方,主要由输送马达、输送带以及输送架等组成,如图5所示。它的功能是将捡拾机构抛送上来的牧草输送至地面。输送机构上装有挡草板,保证捡拾机构拾起的牧草全部落到输送带上。通过控制输送马达,可驱动输送带不同方向的输出,从而实现四种不同的草条铺放位置,如图6所示。

图5 输送机构

(a) 中间集草 (b) 右侧集草
输送机构采用橡胶输送带,其输送能力与输送带宽和输送速度有关,关系如式(2)所示。
Q=B2KdKvKβVγ
(2)
式中:Q——输送能力,t/h;
Kd——断面系数,取145;
Kv——速度系数,输送速度≤1.6时,取1;
Kβ——倾角系数,平行带时,取1;
V——输送带速度,m/s,输送苜蓿的速度为1~3.15,选1.6 m/s;
γ——物料单位容积质量,t/m3,取0.05。
当前,我国普遍使用的割草机收获人工种植苜蓿时,其草条质量为2.5~4 kg/m之间,收获时牧草含水率为40%左右,取机器作业速度为1.8 m/s,捡拾机构输送至输送机构的牧草量为4.5~7.2 kg/s。由式(2)推导得出
所以选取输送带宽度为0.8 m。
2.4 仿形浮动机构
影响集草机捡拾效果的重要因素之一是捡拾机构的弹齿与地面之间的离地间隙。仿形浮动机构能够在起伏不平的地面条件下使弹齿与地面间保持应有的间隙[15],保证机器良好的仿形能力和捡拾效果。仿形浮动机构是由仿形轮、浮动架、浮动弹簧、浮动轴以及调节块等组成[16],如图7所示。

(a) 机构整体图
2.5 液压系统设计
液压系统是集草机非常重要的一部分,主要包括液压泵、捡拾马达、输送马达、横向旋转油缸、纵向折叠油缸、贴地悬挂油缸以及行走轮悬挂油缸等,液压泵是液压系统的核心元件[17],如图8所示。

图8 液压系统图
液压泵与拖拉机动力输出轴连接,为整个液压系统提供动力,捡拾马达驱动捡拾机构捡拾牧草并抛送至输送带上。输送马达驱动输送机构将物料输送至地面,通过调整马达转向可以改变输送带的输出方向。横向旋转油缸将机器的一侧沿水平方向旋转90°。纵向折叠油缸可将机器的一侧提升并垂直旋转90°,达到运输状态。作业前,行走轮悬挂油缸可将机器调整至离地合适的位置,达到最佳作业状态。后轮悬油缸可将两个行走轮提升,便于运输。
3 试验研究
3.1 试验条件
试验前,试验样机进行试运转,达到正常工作状态,试验期间机器工况应保持稳定;试验场地满足各项试验的要求,备有可靠的消防设施。环境风速不应大于4 m/s,环境空气的相对湿度应不大于30%。试验用仪器、仪表应经检验合格,并在检定有效期内。试验条件[18]如表2,满足试验要求。
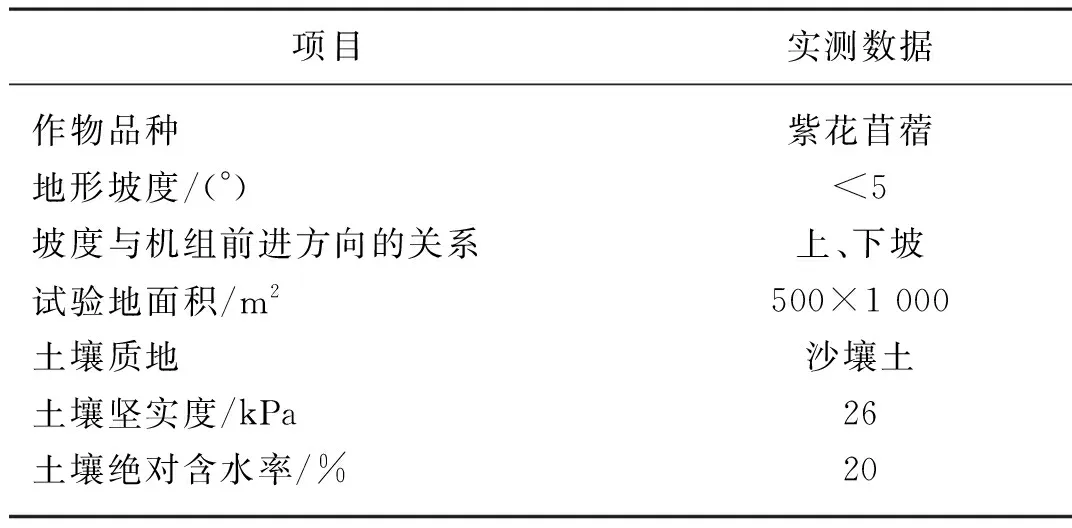
表2 试验条件Tab. 2 Table of experiment condition
依据《GB/T 14247—2015搂草机试验方法》[19]以及《JB/T 10905—2008旋转搂草机》[20]的规定对机器进行性能试验及检测。作业对象为田间晾晒数日的苜蓿,其含水率为40%左右。9JSC-7.0型捡拾输送集草机由60 kW以上拖拉机牵引,动力输出轴转速为1 000 r/min。
3.2 性能试验
试验前按文献[18]的规定划分试验区,对样机进行了试运转和调试,并将样机调整到最佳状态。在机器正常工作状态下进行性能试验,主要进行捡拾幅宽、草条密度变异系数、漏捡损失率以及成草条宽度的测定,并对测定结果进行分析。田间试验照片如图9所示。

图9 田间试验
3.2.1 草条密度变异系数
草条密度变异系数是衡量草条铺放质量的重要指标。在试验现场对各测定点选定长度为1 m的草条,用断面测定仪测定2个端面的表面形状和底宽,求出平均断面面积和平均高,然后截取该段草条称量,用式(1)~式(4)计算草条密度、标准差及草条密度变异系数。测定结果如表3。
(1)
式中:Pt——各测点的草条密度,kg/m3;
mt——各点的每米草条质量, kg/m;
Ft——各测点的断面积,m2。
(2)

n——测定点数。
(3)
式中:S——草条密度标准差,kg/m3。
(4)
式中:Vt——草条密度变异系数。

表3 草条密度变异系数测定表Tab. 3 Variation coefficient of windrow uniformity
3.2.2 漏捡损失率
漏捡损失率是衡量集草机工作效率的重要指标。试验时,在每一测定行程取5 m,分别将集草机通过区域内未捡到的且长度大于7 cm的牧草称重,按式(5)计算漏捡损失率。测定结果如表4,由表4可知,该机漏检损失率为3.7%,低于文献[20]中规定的漏检损失率小于5%的技术指标。测定结果如表4。
(5)
式中:B——漏捡损失率,%;
m1——所测各行程5 m内漏捡的牧草质量之和,kg;
m2——所测各行程5 m内牧草质量之和,kg。

表4 漏检损失率测定表Tab. 4 Table of the loss rate of pickup strips
3.2.3 成草条宽度
试验时,在各个草条间隔均匀取3点,作业后测量形成草条的宽度,求取平均值。测定结果见表5。

表5 成草条宽度测定表Tab. 5 Table of windrowers width
集草机田间试验检测结果汇总表如表6。

表6 检测结果汇总表Tab. 6 Summary table of experiment results
从试验检测结果可以看出,捡拾幅宽为7.2 m,作业速度为5~15 km/h,漏检损失率低;形成的草条蓬松,密度均匀;机具工作稳定、其各项技术指标均达到项目任务书和设计的要求。
4 结论
1) 9JSC-7.0型捡拾输送集草机是“十三五”国家重点研发计划项目中研发的新产品,本文阐述了其总体结构和工作原理,满足我国饲草料机械化收获的发展需求。
2) 介绍了9JSC-7.0型捡拾输送集草机的机架、捡拾机构、输送机构、仿形浮动机构、液压系统等主要工作部件的结构。
3) 苜蓿田间试验及性能检测表明:捡拾幅宽为7.2 m,作业速度为5~15 km/h,漏检损失率为3.7%,机具工作稳定可靠,各项技术指标达均到了项目任务书和设计的要求。
猜你喜欢
林业机械与木工设备(2022年2期)2022-03-08
今日农业(2021年1期)2021-11-26
农业机械学报(2020年10期)2020-10-29
应用数学(2020年2期)2020-06-24
机械工程师(2020年3期)2020-03-27
农机化研究(2017年4期)2017-12-16
小学生导刊(2017年15期)2017-05-17
海外星云(2016年19期)2016-10-24
棋艺(2016年4期)2016-09-20
中国蜂业(2016年3期)2016-09-06
