
大名鼎鼎的加拿大机械臂
2021-09-23 01:00松堂
太空探索 2021年9期
文/ 松堂
提起太空里的机械臂,大家最先想起的肯定是加拿大臂2,它是国际空间站的重要组件之一,可以说是赫赫有名。此前美国航天飞机上的机械臂也是加拿大研制的,人们习惯把它叫做“加拿大臂”。过去的几十年中,加拿大政府大力支持空间机械臂的技术研发,通过加拿大臂和加拿大臂2的研制,大大增强了加拿大在空间机械臂方面的技术实力,并开始着手开发未来行星际探测的空间机器人技术和设备。

航天飞机上的加拿大臂

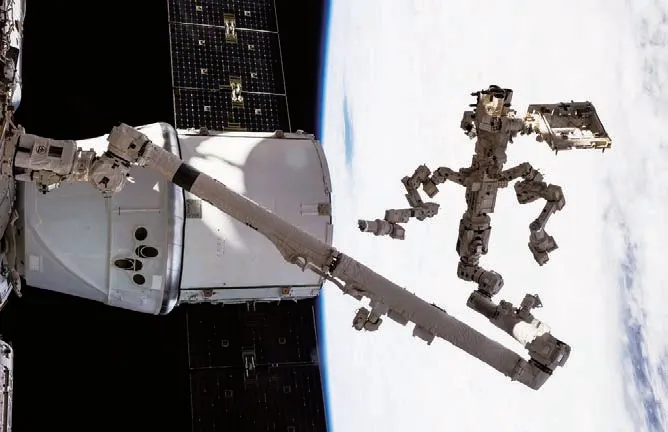
加拿大臂2捕获龙飞船

加拿大臂2捕获天鹅座飞船

加拿大机械手“右手”
第一套空间机械臂——加拿大臂
1981年,加拿大为美国宇航局设计并制造了航天飞机遥控机械臂系统(SRMS),也称加拿大机械臂,随航天飞机一起进入太空执行任务。这是人类历史上第一套空间机械臂。
加拿大臂是6自由度机械臂,长15.2米,重410千克。由6个可控的关节组成,分别为肩部(偏转、俯仰)、肘部(俯仰)和腕部(俯仰、偏车和转动),其中肘部和腕部都安装有相机系统。肘部的相机系统可以为隔壁舱、操作臂和有效载荷提供可视图像,腕部相机可以配合末端效应器和捕获机构进行工作。
它实际上是一个远程控制的机器人操作臂,安装在航天飞机前舱的左舷纵梁上。最初的设计目的是展开和回收有效载荷,帮助轨道飞行器完成停泊或运输任务,可以通过肩部的转动关节在装载位置和操作位置之间转动,根据装载位置旋转和锁定机械臂。
加拿大臂在多次飞行任务中表现出色,在维修哈勃空间望远镜、空间站重要装配任务中都充当了关键角色,也为后续空间机械臂的发展和研究打下了良好的基础。
开创性的加拿大臂2
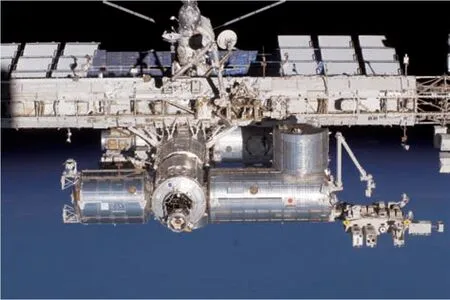
加拿大MDA公司研制的加拿大臂2是目前世界上最先进的空间机械臂之一,它包括活动基座系统MBS、空间站遥控机械臂SSRMS和专用灵巧机械手SPDM三个部分。其中我们最熟悉的是空间站遥控机械臂(SSRMS),它长17.6米,直径0.35米,重量达1497千克,可在太空移动116吨重的载荷,拥有比加拿大臂更灵活的7自由度。加拿大臂2比人的手臂还要灵活,并为复杂的国际空间站操作环境提供了关键能力。这台机械臂开创了太空机器人的一个新时代,欧洲机械臂和中国机械臂在设计上都大量参考了加拿大臂2。
加拿大臂2还是机动式机械臂技术的开创者,可以像“尺蠖”一样在国际空间站上移动,还可以在移动平台系统上机动。

著名的“右手”小机械臂
加拿大臂2还可以在一端安装专用灵巧机械手(SPDM),也叫做“右手”,用于在国际空间站执行精细的维护和维修任务。它的15自由度微型双臂配置高度灵巧,可以承担诸如安装、拆卸、维修小型有效载荷和轨道可替换单元的任务。“右手”还配备了灯光、视频设备、一个工具平台和四个工具架。“右手”通常位于移动基座上,用加拿大臂2抓起来操纵。

夜空中的加拿大臂2和“右手”

加拿大臂2号末端效应器与人体对比

加拿大臂2的末端效应器
被老机械臂安装
加拿大臂2是世界上第一个采用地面打包发射、在轨拆包使用方式的机械臂。为了确保顺利交付。加拿大航天员克里斯·哈菲尔德和美国航天员斯科特·帕拉津斯基接受了专门的强化训练。在美国宇航局的失重水池中实施了机械臂拆包和维护训练。克里斯·哈菲尔德和意大利航天员翁贝托·吉多尼还在模拟器上练习了加拿大臂2的操作。
和中国机械臂以及欧洲机械臂不同的是,加拿大臂2不是连接在空间站舱段上升空的,而是用航天飞机发射,于2001年4月搭载奋进号航天飞机STS-100任务升空。有意思的是,要想安装加拿大臂2,离不开老款的加拿大臂。当“奋进号”到达国际空间站附近,加拿大臂将装有加拿大臂2的金属托盘从航天飞机的货舱中抬起,把它连接到国际空间站的命运号实验舱上。然后航天员哈菲尔德和帕拉津斯基用一根临时电缆,把加拿大臂2和国际空间站连接起来,提供电力、数据和视频连接。随后两人把加拿大臂2从托盘上卸下,手动展开,把铰链固定在中间。
在空间站内部,美国宇航局航天员苏珊·赫尔姆斯和吉姆·沃斯远程控制加拿大臂2把其中一个末端效应器伸出来,连接到“命运”上的一个基座上,然后从金属托盘上松开,这是它在太空中的第一次机动。然后加拿大臂2把用来运输自己的托盘移走,并“传递”给加拿大臂,这是两个加拿大机械臂在太空中的首次联合行动。
加拿大臂2不仅非常灵活而且移动能力很强,是建造维护国际空间站的得力助手。它参与了国际空间站的大部分组件和舱段的组装,广泛用于空间站组装建设、空间站维护、空间站有效载荷运输和服务,以及抓取释放飞船、卫星等任务,并为太空行走提供了支持,在国际空间站的建造和运行中立下了汗马功劳。
加拿大臂2和“右手”组合状态
轨道维护记录
与航天飞机上的加拿大臂不同,加拿大臂2要求在太空中使用15年以上(实际上已经超期服役好几年了)。这就要求加拿大臂2具备一种新能力——允许航天员或其他机器人系统在轨道上修复加拿大臂2。因此加拿大臂2也是轨道可替换单元(ORU)技术的开创者。空间维修功能在实际使用中表现出色,到目前为止,加拿大臂2已经经过了3次换件维修。
2002年6月,航天员通过太空行走更换了加拿大臂2的一个腕关节。2017年和2018年,航天员通过舱外行走更换了它的两个末端效应器。
机器人技术培训中心
为了培训航天员使用加拿大臂2以及“右手”,加拿大航天局在位于魁北克省圣休伯特的总部设有培训中心。舱外航天员和舱内控制员必须在机器人培训中心接受强化训练。
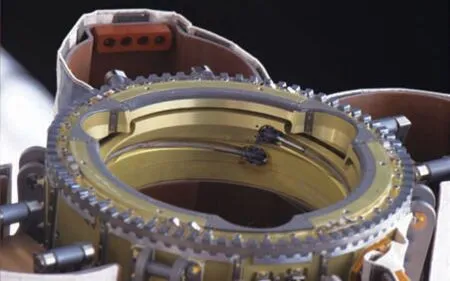
末端效应器的齿圈

加拿大臂2号捕获龙飞船的模型
该中心的一个多媒体教室和一个仿真工作站,与国际空间站上的工作站完全相同。在多媒体教室里,航天员和飞行控制员要学习机器人工作原理和安全操作方法。其中设置了加拿大臂2和“右手”的比例模型,模拟软件和交互式白板,可以实施多个摄像机角度的视频会议和远程学习。
在课堂上学习了理论概念后,航天员们就转移到工作站上进行模拟实操。
机器人工作站包括:一台配有两个手动控制器的笔记本电脑,用于调整加拿大臂2的俯仰、摆动和旋转。三个屏幕显示来自加拿大臂2和其他外部摄像头的视频。完成这一阶段的航天员和飞行控制员将前往美国休斯顿,进行其他部分的训练。
未来发展
目前,加拿大正在为美国的地月轨道空间站研制“加拿大臂3”。为了适应遥远路途,它的体积变小了,但智能化水平反而更高。加拿大臂3仍然包括机械臂和灵巧机械手两个部分,但应用了更先进的机器视觉、简短的软件和人工智能系统,可以在无需航天员遥控干预的情况下执行任务。

加拿大臂 加拿大臂2 加拿大臂3定位 首次进入太空的机械臂 2001年进入太空 考虑安装在美国地月轨道空间站上安装位置 每架航天飞机上都有一台,现已退役 国际空间站上所需位置 地月轨道空间站上所需位置移动范围 固定安装,能触及不超过机械臂长度的位置可以在国际空间站的基点之间爬行,甚至可以安装在桁架滑车上,机动到更多位置,能触及国际空间站每个位置和国际空间站情况类似,将可以触及空间站每个位置安装点 航天飞机货舱 无固定安装点 无固定安装点7自由度,更类似于人臂: 肩部3个; 肘部1个:腕部3个关节活动范围 肘部限160度 各关节可以旋转270度 各关节可以旋转360度自由度6自由度,类似于人臂: 肩部2个; 肘部1个:腕部3个7自由度,更类似于人臂: 肩部3个; 肘部1个:腕部3个有力-运动传感器,有触觉,具备避撞功能;具备对周围物体的三维成像能力长度 15米 17米 8.5米直径 33厘米 33厘米 23厘米运动速度 无载荷:每秒60厘米有载荷:每秒6厘米触觉能力 无 有力-运动传感器,有触觉,具备避撞功能无载荷:每秒37厘米有载荷:每秒2厘米(地面遥控)或每秒15厘米(在轨控制)无载荷:每秒10厘米有载荷:待定材料 16层高强度碳纤维 19层高强度碳纤维 待定维修 回地面 在轨维修,模块可换 在轨维修,模块存储在舱内控制 航天员控制 地面遥控或航天员控制 主要靠自主运行,也可以由航天员或地面控制6个高清4K摄像头,肘部两侧各1个360度摄像头,2个转环处1个,2个末端效应器上各1个。操作国 美国 美国-加拿大 加拿大携带相机 肘部和腕部各1个 4个,肘部两侧各1个,2个末端效应器上各1个。

加拿大臂3将用在美国地月轨道空间站

天鹅座飞船(右)和联盟飞船并列在国际空间站上,天鹅座飞船是用机械臂捕获的

末端效应器特写

美国航天飞机上的机械臂,也是加拿大的产品
机械臂的真正用武之地:空间服务
到目前为止,太空中的机械臂还是稀罕物。但作为世界上最领先的空间机械臂开发单位,“加拿大臂”的研制方麦克唐纳·德特维尔空间与先进机器人公司认为,空间机械臂乃至空间机器人应该被看做一个更大范畴概念的一部分,也就是空间服务。它未来将成为一种普及型设备,在空间服务任务中大行其道。
如果从航天飞机时代算起,太空服务的历史已经有40年了。广义上的太空服务包括航天器交会、检查和对接、有效载荷和卫星部署、操纵、回收、再补给和维修等在轨活动,以及卫星的转轨和离轨。这些太空服务可以用机器人来完成,也可以用航天员来完成。考虑到人类进行太空行走的难度和风险,机器人系统才是太空服务的主力。
实际上,航天服务机器人界可能已经到了一个十字路口:从政府主导的航天服务任务向商业化的航天服务任务过渡,不但面临空间维修需求,还面临着如何清除轨道碎片和垃圾的问题。
不但如此,一些酒店运营公司已经制定了建造轨道太空酒店的计划和蓝图。根据美国宇航局的一项研究,太空旅行和娱乐市场很容易发展成为每年数十亿美元的产业。这里还没有考虑天基太阳能、天基制造和空间资源开采等市场。这些市场的开发,都需要大量空间基础设施的存在,而如何去搭建和维护它们,就是个决定性的因素。考虑到人类太空行走的巨大风险,必须靠各种类型的空间机器人来实施在轨服务。要尽可能减少人在回路中的干预,需要机器人具备处理非合作目标和非合作有效载荷的自适应能力,并拥有智能视觉和控制系统等。
如果上述技术能够得到逐步突破,那么在未来的商业航天中,机器人和机械臂肯定会扮演非常重要的角色。
责任编辑:夏丹
相关链接
国际空间站上的其他机械臂
日本实验舱远程机械手系统
在国际空间站的日本“筑波”上也有一个机械臂,叫做日本实验舱远程机械手系统(JEMRMS),用于支持在“筑波”上进行的实验,或支持“筑波”在太空中的维护任务。这个型号虽然已经在天上运行了不少年,但国内媒体对它介绍不多。
JEMRMS是日本第三个太空遥控机械臂系统,第一个是1997年8月日本的操纵器飞行演示,第二个是1997年11月的工程试验卫星VII上的机械臂。JEMRMS由主臂和小细臂两部分组成。舱内还设置了控制工作站。
其中10米长的主臂转移(抓斗和移动)大型物体,2米长的小细臂用于精确、精细和微调操作。主臂和小细臂都有6个关节,能够实现和人类手臂类似的运动。航天员可以在加压舱内控制JEMRMS,同时在控制台上的电视监视器上观看手臂摄像头拍摄的图像。
借助这些机械臂,航天员可以执行多项任务,包括交换外置桁架和暴露试验单元。
按设计JEMRMS要在轨道上运行10年以上,因此在发生故障时可更换或可修复。这些仪器可以通过舱内或舱外活动进行修复,但是主臂的维修只能通过舱外活动进行。

表2 JEMRMS(主臂和小细臂)的参数

从筑波舱看日本机械臂

测试中的日本机械臂
日本机械臂的安装位置
JEMRMS系统由5个部分组成:
1.主臂
主臂由吊杆、关节、电视摄像机、摄像机云台单元、灯和末端效应器(抓斗夹具)组成。共有3个主臂吊杆,分别编号为1、2、3。视觉设备(电视摄像机、传输设备和灯光)连接在吊杆2和吊杆3上。
主臂主要用于交换外置桁架有效载荷(使用标准有效载荷包,尺寸为1.85m ×1.0m×0.8m,重 量 小 于500kg)。外置桁架有效载荷由主臂末端效应器移动。
2.小细臂
小细臂由电子设备、吊杆、接头、称为“工具”的末端执行器和电视摄像机组成。当小细臂被主臂末端效应器抓取时,使用小细臂。

日本机械臂的发射状态
小细臂主要用于精确、精细和微调的任务,包括交换外置桁架上的轨道替换单元,轨道替换单元的最大重量为80 kg。
小细臂在航天飞机STS-85任务期间曾经实施了在轨验证,机组人员能够轻松操作手臂。它具备的柔顺功能,可以利用手臂上的扭矩/力传感器来感知何时接触目标,之后自动调整姿态。
2.JEMRMS控制台
JEMRMS控制台由管理数据处理器、笔记本电脑、手控制器、电视监视器和保持/释放电子设备组成。数据处理器通过与作业控制程序、国际空间站的控制命令和控制多路复用器通信来控制JEMRMS系统。笔记本电脑和手控制器用于操纵JEMRMS。电视监视器显示从外部摄像机拍摄的图像。保持/释放电子设备用于操作保持和释放机构。
4.小型细臂收纳设备
小型细臂收纳设备是在小细臂不工作时收纳之用,安装在外置桁架上。
5.保持和释放机构
当主臂发射到国际空间站时,机组人员将操纵JEMRMS控制台上的保持/释放电子设备,从保持和释放机构上释放锁定的主臂,然后将主臂展开。
德国机械臂
除日本机械臂外,另一个我们不太熟悉的机械臂是空间站上的德国机械臂(ROKVISS)。德国机械臂2005年1月发射升空,安装在国际空间站俄罗斯服务舱内。与其他机械臂相比,德国机械臂的结构比较简单,体积也较小,仅有两个关节和一个长50厘米的手指,配有两个内置照相机。
发射德国机械臂升空的主要目的,是为了验证高集成模块化的关节,研究自动控制和地面远程控制模式下机械臂的运行性能。它在空间上的主要工作除了执行空间站舱外任务外,还可以在卫星上执行操作任务。
德国机械臂的设计寿命为一年,一年的在轨运行为后续更复杂的机械臂设计提供了依据和思路。
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
军事文摘(2022年10期)2022-06-15
军事文摘(2022年8期)2022-05-25
作文大王·低年级(2022年4期)2022-04-23
伴侣(2020年11期)2020-12-14
健康必读·下旬刊(2018年2期)2018-05-26
南都周刊(2017年9期)2017-07-31
环球时报(2016-07-11)2016-07-11
城市建设理论研究(2011年23期)2011-12-20
环球时报(2010-01-19)2010-01-19
