
一种自航式多功能海洋工程作业船的技术方案
2021-09-23 16:51张亮
广东造船 2021年6期
关键词:多功能
张亮

摘 要:分析国内外海上油气工程作业所需的专用船舶,结合现有几类特种船舶的作业特点,提出一种自航式多功能海洋工程作业船的技术方案。自航式多功能海洋工程作业船是一种特殊的工程船舶,它具备自航及动力定位能力,可进行水下施工作业、无钻机修井作业、无钻机封井和弃井作业、测井作业、水下遥控机器人、饱和潜水作业、对外消防等。该船在作业中机动灵活,自持能力强,综合性能好,为中深水油气田开发提供了一种新的选择。
关键词:自航式;工程船舶;多功能;修井;弃井;饱和潜水
中图分类号:U662.2
文献标识码:A
1 前言
随着国内外对深水油气开发力度的不断加大,为满足海上油气田从开发到弃置的全生命周期管理服务和应急维修需要,保障油气田持续安全平稳运行,我国油田服务公司先后开发了多种类型的海洋工程船舶:中国海洋石油工程股份有限公司的海洋石油285、海洋石油287[1]; WELL OPS SEA PTY公司的轻型专用工作船[2]等。但目前大部分工程船的初始设计为专船专用,作业模式较为单一,难以完成其他类型的作业,导致在作业空档期出现闲置状态。
本文介绍的一种多功能海洋工程作業船技术方案能够在很大程度上解决上述作业能力受限的问题,其具备的多功能特性,可为中深水油气田开发的大部分作业提供支持服务,从而减少船舶的闲置期,具有较好的实用性和经济性。
2 母型船选择
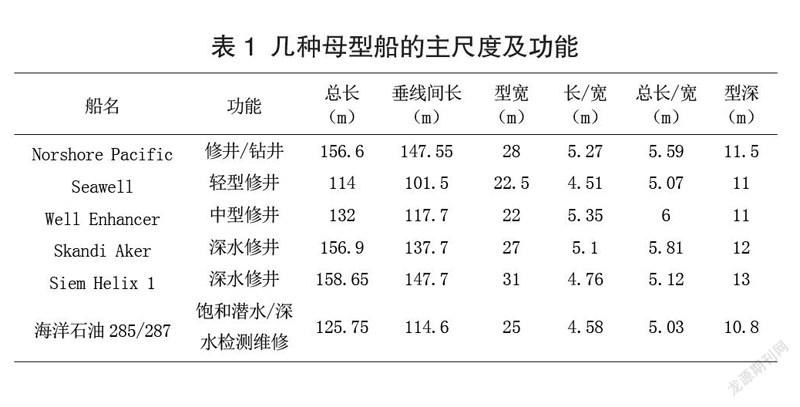
通过对行业内现有相关船型的调研和分析,筛选出具有类似功能和性能的船舶作为母型船[3-4]。在吸收和保持母型船优点的基础上,根据我司的使用经验、操作习惯和需求,初步确定几种母型船,其主尺度及功能,如表1所列。
3 船舶用途及主尺度
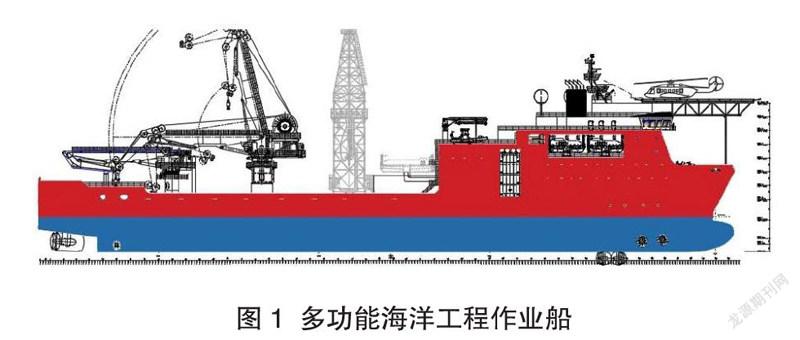
本船采用电力推进方式:配备6台柴油发电机组,总功率约22 000 ekW;设有2套3 500 kW全回转舵桨、2套1 500 kW伸缩式全回转推进器、2套1 500 kW和1套880 kW轴隧式侧向推进器;具有DP3动力定位能力。船舶外形见图1。
本船可承担水下施工和安装作业、修井作业、封井和弃井、测井作业、水下遥控机器人作业、饱和潜水作业、井控应急处理、矿区供应、海上对外消防等作业任务。
船舶主尺度及参数如下:
总长 163.71m
垂线间长 152.85 m
型宽 28.20m
型深 12.00 m
设计吃水 7.00m
最大吃水 8.20m
静水航速 14.00 kn
甲板载货能力 1500t
人员 122人
甲板可用面积 1700m2
最大作业水深 3000m
白持力 30昼夜
航区 无限航区
操作环境温度 -20℃ -45℃
DP定位(+/-30°) 风速13.8 m/s,有义波高3.1m,流速1.5 kn。
4 船舶布置
4.1 总体布置
(1)设有长首楼和封闭式船首:
首楼内设船员和工作人员居住舱室、会议室、办公室、医务室、健身室、厨房、餐厅、休息室等,首楼上方为直升机升降平台;封闭式船首为锚机操作区域提供了保护,大大提高了在恶劣海况下起抛锚作业的安全性,也改善了甲板上浪情况;饱和潜水工作工作室紧邻生活区;
(2)船中部设有一个月池开口,月池上部为修井模块塔架;
(3)主甲板后部右舷布置1台200 t主吊机,左舷布置1台40t辅助吊机;主甲板月池后部主要布置散料和泥浆系统相关的舱室和设备,包括:泥浆混合室、高压泥浆泵、HPU室、带有水泥和膨润土罐的散装罐室、泥浆实验室、水泥处理室、液体泥液舱等;2套全回转舵桨舱布置在船尾部左右两舷;
(4)2个主机舱设在船首部两舷,每个机舱内布置3台柴油发电机组及相关设备;
总体布置和舱室划分及设备布置,见图2、图3。
船首将机舱、首侧推舱及边舱及其上层建筑连接成一个封闭的整体,增加了上层建筑可用区域面积。
4.2 驾驶室布置
桥楼根据规范要求设计[5],一人即可完成航行操作:驾驶室布置有前、后驾控台、两翼控制台、海图桌、安全控制台及无线电控制台,形成综合的桥楼系统,满足所有功能要求;后驾控台间布置有两套电控滑动驾驶操作椅,船员坐在操作椅上即可完成操船、DP操作和通信工作;驾驶室还配置了工作桌、咖啡休息区、沙发和卫生单元,使驾驶人员操作方便,舒适。
4.3 生活区布置
生活区设有能容纳122人的居住舱室,其中单人间42个、双人间40个,均带单独浴室,布置环境满足ILO规则[6];还设有餐厅、厨房、医务室、健身房、娱乐室、会议室等生活和工作舱室,配有电视、电脑、音响等娱乐设备和健身器材。
为达到优异的减振降噪效果,全船在减振降噪方面采取了全方位措施,从位于机舱二平台的配电室到最顶层居住甲板,均设置了高质量的浮动地板;舷侧、露天围壁及甲板、机舱棚等处,根据隔热隔音要求敷设了相应的优质绝缘;住舱间的隔板使用双层壁板;所有壁板、天花板、升高地板等均采用弹性连接。
5 船舶主要系统与能力
5.1 数字智能管控系统
本船采用的管控系统集成度与智能化较高:该系统基于船舶现场总线设计,数据采集箱分布于船上各个区域进行收集和处理数据,然后通过现场总线上传数据。这些数据在集控室工作站显示和控制,在驾驶室工作站仅可显示;系统集成了智能配载系统、关键设备全生命周期管理系统、能耗在线监测与故障分析系统、智能化管控平台HMI、智能环境管理系统、船舶白动控制系统等[8]。
此系统通过很多模拟画面显示数据、可控设备和相关报警信息,船员通过一个画面可以知悉船舶所有部件参数信息,包括频率、电压、电流等,船员可以切换工作模式和操作发电机,包括发电机开关和汇流排开关;在集控室设置操作员站、工程师站、通讯、信号系统设备等。此外,还设置综合报警盘,用作手动关断、启动消防设备以及重要报警信号的显示。
5.2动力定位系统
(1)动力定位系统满足中国船级社对DPⅢ的要求,定位环境指标达到99.99.99;
(2)驾驶室后驾控台配置有独立的联合操作单元,驾驶室两翼控制台和前驾控台都配置有联合操作插座,用于便携式联合操作单元,可实现多方位联合操作,比如靠港、航行等;
(3)系统利用扩展的卡尔曼滤波器模型,可根据干扰等级和测量频率实现最优滤波,从而获取船舶首向和位置信息[9],同时提供不同参照位置的最优组合。如果失去所有位置测量,系统模型提供冻结计算模式。
5.3 散料和泥浆供应能力
现有供应船的散料输送系统和泥浆输送系统为各自独立的系统,不同的处理系统只能针对单一的物料进行储存和输送,造成部分储存输送设备的闲置,导致运载利用率下降。
为解决以上问题,本船采用散料和泥浆兼容的输送系统[10],可实现干散料和泥浆等各种固体、液体物料的兼容存储、运输;可为2-3个油田提供散料及泥浆支持,是普通平台供应船供应能力的3倍。
加载站和外输站分布在尾部主甲板下左右两舷,舱内可装载600 m3加重材料和120 m3水泥并配缓冲罐,所有的散料缓冲罐具有约4 bar的丁作压力;泥浆池为500 m3,带搅拌器,能够快速配置压井泥浆并进行外输。
5.4 井控应急救援能力
(1)当海上作业出现井控应急情况时,本船通过白带/安装相应设备、工具出发,完成一定程度的应急响应,包括水下清障、LMRP CAP作业、压井作业等;
(2)本船具备FiFiⅢ级对外消防灭火能力,配备大排量水雾喷射装置实现大火隔离与防护;为抢险平台提供应急照明,实现50 m外覆盖100 m宽的作业现场;单独设置指挥系统,包括与陆地、作业平台和其他辅助船的通讯、视频、监控、监测报警系统等;
(3)具备处置海上防污染的能力,可装载溢油回收设备标准的模块单元,便于安全、快速地拆装和固定,提高效率;
(4)配备一台带主动波浪补偿功能的海丁折臂吊,用于进行海床和水下等相关安装操作作业,在应急情况下可吊装模块设备至导管架平台井口处;在主动波浪补充模式下,吊车可以满足在10 m半径起吊200t货物,副钩绞车具有1t的载人功能。
5.5 水下作业支持能力
(1)船中部设置了一个7.8 m×7.8 m的月池,月池上部安装修井模块塔架,建立水下井口与船舶的流程連接:海底基础装置、管汇的安装、管串组装和起下,配合目前较成熟的无钻机修弃井装备,可解决在修弃井作业过程中的环空带压、井筒内封堵、井口或者水下结构物切割回收等问题,处理水下井口复杂情况,较传统的轻、中型丁作船综合能力更强。
(2)配备两套吊臂式水下机器人收放系统,可满足3 000m作业水深。该类型的收放系统体积小、结构简单、成本较低,其吊臂长度可进行伸缩调节,能很好地适应各海域的复杂海况。
(3)配备一套12人的饱和潜水支持系统,可保障潜水作业安全、高效、可持续的进行。系统包括3个高压舱、1个潜水钟以及1艘高压救生艇;船首左舷位置安装一套具备应急回收能力的潜水钟回收释放系统。
6 小结
白航式多功能海洋工程作业船是针对中深水油气田开发而设计.该船综合了多种专业工程船的优点,将多种功能集成化,实现一船多用。随着深水工程向高技术、高效率、高集成化发展,性能先进、适应性强、经济性好的多功能作业船舶,将会受到用户的欢迎。
参考文献
[1]贺明鸣,鲁鼎,桂满海.深水多功能海洋工程船总体设计[J]船舶设计通汛.2020( S1):18-22.
[2]邓文杨.]:程船方式的永久弃井作业在南海的首次应用介绍[J].科协论坛.2012( 01):17-18.
[3]李俊.无隔水管修井作业装备发展概况及趋势[J].海洋]一程装备与技术.2019.6(01):429-433.
[4]张志刚.轻型无隔水管作业船在水下井口油井修井中的应用[J].安全、健康和环境.2019,19( 08):11-14.29.
[5]中国船级社.钢质海船人级规范[M].北京:人民交通出版社.2021
[6]毛欣维.2006年海事劳工公约解读系列之五海员起居舱室相关规定(上)[J].中国船检.2010(2):88-91
[7]朱晓勇.船舶主机HPSCR布置及系统研究[J]江苏船舶.2021( 02):25-28.
[8]姜涛,王永珊,郑楚忠等.船舶综合集成自动化系统设计和试验[J].广东造船.2018( 02):28-31.
[9]何进辉,张海彬,朱仁传等.某深海钻井船DP3动力定位能力分析[J]船舶.2018( 05):11-17.
[10]蔡钿,陆炳良,熊曙.散料和泥浆兼容输送系统研究[J]船海工程.2014( 02):139-143
猜你喜欢
建筑建材装饰(2016年13期)2017-01-04
企业技术开发·下旬刊(2016年11期)2016-12-27
物理教学探讨(2016年11期)2016-12-19
科技视界(2016年26期)2016-12-17
家庭科学·新健康(2016年9期)2016-10-25
企业导报(2016年13期)2016-07-19
科技视界(2016年7期)2016-04-01
