
某半潜船的水动力性能仿真分析
2021-09-23 06:27秦成怀利敏史淑玲
广东造船 2021年6期
秦成 怀利敏 史淑玲
摘要:随着海洋装备技术的发展,海上大型结构物的海上作业和运输任务越来越多。在此背景下,大型结构件、大型平台模块以及一些大型舰船的运输需求越来越多,大量的半潜船应运而生。在半潜船研发中,其水动力性能的研究至关重要。本文采用水动力计算软件AQWA进行某半潜船水动力性能仿真分析,计算结果表明:在常见波浪周期内,水动力系数波动较大并出现波峰/波谷;顶浪状态下运输船的运动响应数值相对偏小;横浪作用时半潜船的系泊张力最大。
关键词:AOWA;半潜船;水动力性能
中图分类号:U662.2
文献标识码:A
1 概述
1.1 半潜船的基本概念
近年来,随着海洋装备技术的发展,人类针对海洋资源的开发逐步走向深蓝,海上大型结构物的海上作业和运输任务越来越多。在此背景下,大型结构件、大型平台模块以及一些大型舰船的运输需求越来越多,由此产生出了大量的半潜船。半潜船也叫半潜式母船,主要用于运送货物超长、超重而又不能进行分割吊装及运输的大型海运船舶。
半潜船一般具有较大面积开敞露天甲板用于载货,在装卸货作业过程中通过调整白身压载水量实现船体的下潜,装载完成后排除压载水浮出水面正常航行。
半潜船按是否带有动力系统,主要分为白航式和非白航式两种类型;非白航式半潜船一般由拖船拖带,在近海作业;白航式半潜船主要在远洋航行,用于大型构件运输。上世纪半潜船主要在荷兰发展,进入本世纪后,中国开始建造大批量半潜船,其中比较典型的有“泰安口”号、 “康盛口”号。
半潜船主要有以下特点:一是载货甲板宽大平直,除首、尾楼外,整个船体中部为平直甲板,且横向全贯通,有效载货面积大;二是载重量较大,通常净载重能力为3-10万DWT;三是浮态可调性好,通过调节压载水量,可以像潜艇一样下沉与上浮,甲板面可下潜至水面以下30 m;四是主甲板承载能力强,可承运各种重型装备;五是适航性好,可具有白航能力,航速一般在12 kn以上且适合远海航区[3][4]。
海洋钻井平台等特大件货物,通常不可分割且大多数形状不规则,对半潜船运输大件货物时的稳性带来不利影响,在运输安装过程中易受风浪流影响,甚至发生翻沉事故[5-10]。为了确保半潜船在恶劣的海洋环境中的安全运输、正常作业,减少生命和财产的严重损失,有必要对半潜船在风浪流等外力作用下的水动力性能进行仿真分析。
1.2 水动力学软件AQWA
AQWA软件是由ANSYS公司研发的船舶与海洋工程集成模块软件,主要用于求解各种海上浮式结构在风、浪、流等复杂海洋环境下的水动力特性和及其运动响应,包括系泊定位、海上安全作业、航行以及波浪载荷传递等方面的问题。常用的AQWA软件主要有AQWA-LINE、AQWA-LIBRIUM、AQWA-FER、AQWA-DRIFT、AQWA-NAUT等:AQWA-LINE主要用于求解浮体结构在规则波中的响应问题,可计算任意形状浮体结构周围的波浪力;AQWA-LIBRIUM用于计算锚链线张力及其静动稳定特性;AQWA-FER用于计算随机波下浮体的载荷和运动响应的平均和有义值;AQWA-DRIFT用于计算随机波浪环境下多体载荷和运动的时间历程;AQWA-NAUT主要计算特定波浪下的响应,可进行耦合/非耦合/半耦合分析。
本文采用AQWA水动力学仿真软件,对风浪流作用下某半潛船的水动力学特性及系泊特性进行仿真分析。
2 某半潜船的水动力学建模
2.1 三维模型构建
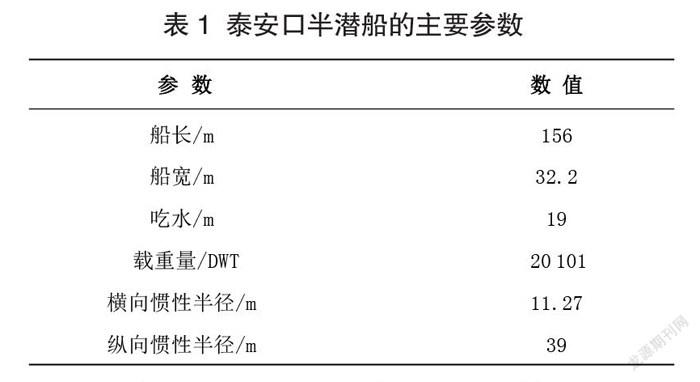
本文以我国“泰安口”号半潜船为研究对象,其主要参数见表1。
根据“泰安口”号半潜船的船体尺寸,采用ANSYS软件建立某三维模型,如图1所示。
2.2 海洋环境条件设定
仿真计算的环境工况设定为:波浪选用JONSWAP谱,风选用NPD谱;风向与浪向一致;流的方向与风向和浪向一致。根据半潜船作业条件,确定其海洋环境条件为3级海况,具体参数见表2。
2.3 系泊缆参数设定
半潜船共有4根缆索,呈对称布置,缆索长度为500 m,缆索与水平夹角为45°。具体参数见表3。
2.4 仿真流程
将构建的半潜船的三维模型导入到AQWA软件中,根据上述海洋环境和系泊系统参数设定仿真边界条件,从而建立半潜船的水动力学模型,如图2所示:
(1)先利用AQWA软件进行频域分析,计算得到半潜船的水动力系数;
(2)接着进行不同海洋环境条件的时域仿真,分别模拟风浪流同向下斜浪、横浪、迎浪下三种典型工况,仿真得到每种工况下的半潜船运动响应及系泊力结果,并进行对比分析不同装载工况、不同潮位和风浪流的组合工况。
3 仿真计算结果分析
3.1 水动力学参数特性分析
本文主要计算了半潜船在规则波中的附加阻尼和波浪力等水动力学参数:纵荡附加阻尼和波浪力,如图3~图4所示;横荡附加阻尼和波浪力,如图5~图6所示;垂荡附加阻尼和波浪力,如图7-图8所示。
由图3-8可见:波浪周期在5-10 s时,半潜船的水动力系数的波动较大,并出现波峰/波谷位置;对比半潜船的各摇摆运动的水动力系数:垂荡摇摆运动的水动力系数最大,纵荡摇摆运动的水动力系数最小,横荡摇摆运动的水动力系数介于中间。
3.2 运动响应仿真分析
当风、浪、流等外力同向时,各外力合力作用下半潜船将产生较大的运动响应。本文的计算假定风、浪、流同向,并分别以与坐标成180°(顶浪)、90°(横浪)、45°(斜浪)三个外力作用角度进行计算分析,模拟计算时间为3h:
(1) 180°(顶浪)条件下半潜船摇摆响应如图9-10所示。
由图9-10可知:在180°(顶浪)条件下,半潜船纵荡运动幅度最大约为4.72 m,纵摇运动最大幅度约为0.291°;
(2) 90°(横浪)条件下半潜船摇摆响应,如图11-12所示。
由图11-12可知:在90°(横浪)条件下,半潜船横荡/横摇运动非常剧烈,横荡运动幅度达到26.35 m,横摇运动幅度达到9.818°,给半潜船带来严重的安全隐患;
(3) 45°(斜浪)条件下半潜船摇摆响应,如图13-14所示。
由图13-14可知:在45。(斜浪)条件下,半潜船的垂荡运动幅度最大达到0.495 m,首摇运动幅度最大达到2.848°。
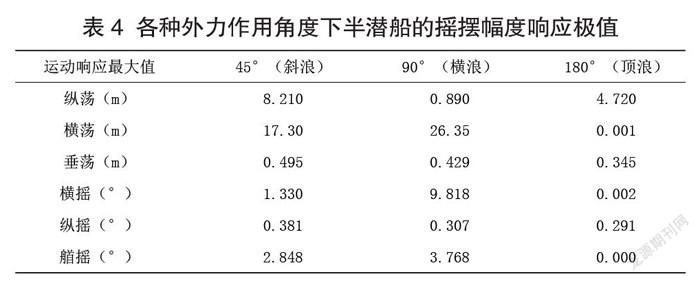
在各种外力作用角度下,半潜船的摇摆幅度响应极值,如表4所示。
由表4可见:不同外力作用角度条件下,半潜船的摇摆响应极值为:180°(顶浪)条件下,摇摆响应值普遍为最小值(纵荡除外);90°(横浪)条件下,横荡、横摇和首摇的摇摆响应幅值最大;45°(斜浪)条件下,纵荡、纵摇和垂荡的摇摆响应幅值最大。
对比不同外力作用角度条件下,半潜船的摇摆响应相对幅值为:180°(顶浪)条件下,摇摆响应幅值相对较大的是纵荡和纵摇;90°(横浪)条件下,船摇摆响应幅值相对较大的是横荡与横摇运动;45°(斜浪)条件下,摇摆响应幅值相对较大的是垂荡与首摇。
3.3 系泊力仿真分析
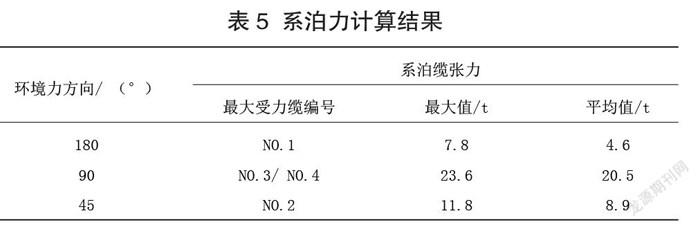
当风、浪、流同向时,半潜船系泊系统上将产生较大的系泊力。本文假定风、浪、流同向,并分别以与坐标成180°,90°,45°三个方向进行计算,模拟计算时间为3h,计算系泊力的最大值和平均值,计算结果见表5。
由表5可見:90°(横浪)条件下,系泊系统的系泊力最大,主要由No.3和No.4系泊缆来分担。其中NO.3系泊缆的系泊力最大,达到23.6 t,系泊缆的安全系数小于2,安全冗余量偏小。
4 结论
(1)波浪周期在5-10 s时,半潜船的水动力系数的波动较大,并出现波峰/波谷位置:垂荡运动的水动力系数最大,纵荡运动的水动力系数最小,横荡运动的水动力系数介于中间;
(2) 180°(顶浪)条件下,半潜船的摇摆响应幅值普遍为最小值(纵荡除外);90°(横浪)条件下,摇摆响应幅值相对较大的是横荡与横摇运动;45°(斜浪)条件下,摇摆响应幅值相对较大的是垂荡与首摇;
(3) 90°(横浪)条件下,半潜船的系泊缆张力最大,需要对系泊缆的安全冗余进行校核。
参考文献
[1]李勇.半潜运输船应用与发展[J].船海T程,2016(1):45 - 49.
[2]黄蓓蓓,于洋.半潜船发展历史与展望[J]中国水运,2010(1):4-6.
[3]苏晨,谢新连,马梦知等.大件运输船舶的发展现状与动态究[J].船舶工程,201(3):4-8.
[4]莫瑞芳,刘亚东.15000吨半潜船耐波性分析和短期预报[J].船舶工程,2011(2):20-24.
[5]卫其明半潜船在大风浪中防抗台风的注意事项[J].航海技术,2002(4):6-7.
[6]韩凌,杜勒.深水半潜式钻井平台锚泊系统技术概述[J].船海工程,2007. 36(3):82 -86.
[7]童波,杨建民深水半潜平台悬链线式系泊系统祸合动力分析[J]中国海洋平台,2008,23.
[8]胡毅.基于AOWA的大型LNG船码头系泊分析[J].舰船科学技术,2012(2):70-73.
[9]ARCANDRA.TAHAR,
KJM M H Coupled-clynamiC analysis of Boatingstnw.tures with polyester mooring lines[J] ().ean ErWneering. 2008,38(35):1676 - 1685.
