
园林巡监机器人行走装置的设计与研究
2021-09-15 07:50张久雷
机械设计与制造工程 2021年8期
刘 静,张久雷
(1.广东职业技术学院艺术设计系,广东 佛山 528041) (2.广东职业技术学院机电工程系,广东 佛山 528041)
随着机器人技术的发展[1],很多科学工作者对机器人行走装置进行了应用研究[2]。目前,园林景区的日常维护和巡防监测多靠人工进行[3],自动化水平不高,因此有必要设计一种可在野外非路面崎岖环境下进行园林景观巡监的机器人,以提高景观维护和环境巡监工作的效率[4]。足式步行机器人能在凹凸不平、泥泞、砂石多的沼泽、草地、坑洼等非路面行走,具有较高的多地形运动适应能力和越障能力,更加适用于园林、森林以及农田等野外非路面崎岖工作环境,自行游走,进行巡防和环境监测工作。本文设计制作了一种适合园林、森林等局部野外非路面崎岖环境的机器人行走装置,并通过对步行腿机构的分析,找出其极限位置,确定步行腿的运动空间。样机试验结果验证了设计原理正确,可为下一步行走装置的优化设计和动力学分析提供依据。
1 总体设计方案
本文设计的园林巡防监测机器人只需1个电机和1根曲轴驱动即可实现确定的三角形步态[5-6]运动。电机输出的动力经传动齿轮传递给中间传动轴,再经传动轴两侧端点的2个方向相反的曲轴传递给机体两侧的步行腿机构。机体同一侧的曲轴与同侧后(或前)腿连杆机构连接组成曲柄摇杆机构,驱动后(或前)腿做前后运动,并与另一边的中间腿前后运动方向一致。同侧前后步行腿组成平行四边形双摇杆机构,即在此机构运动的过程中,前、后步行腿摆动方向一致。如此与中间腿配合,即可实现机体6条腿的行走运动。本文设计的园林景观巡监机器人行走装置分布在机器人主体两侧,均为由7个连杆构成的功能一致的行走机构,行走装置原理图如图1所示。

图1 机体行走装置原理简图
2 行走装置运动学研究
2.1 行走装置连杆机构的分解
为研究方便,将单边行走机构的7个连杆分解成3个四杆平面机构:
1)杆AC、AB、BD、机架CD组成的四杆机构构成前、后腿机构(腿1与腿3),如图2(a)所示;
2)杆OE、EF、滑块、机架OF组成导杆机构构成中间腿机构(中间腿2),如图2(b)所示;
3)杆OE、EB、BD、机架OD组成的曲柄摇杆机构构成后腿机构(腿3),如图2(c)所示。
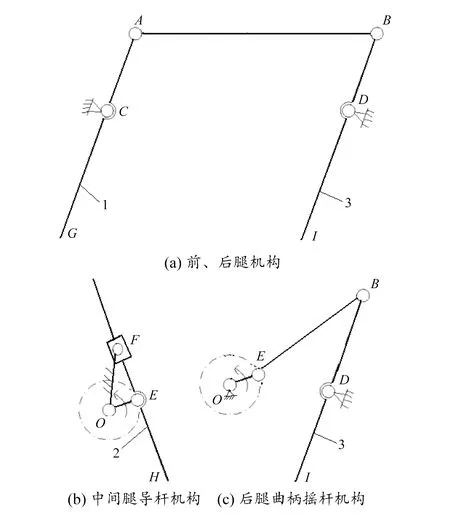
图2 单边行走机构分解
设定步行腿各连杆初始尺寸为:AG=BI=48 mm,EH=18 mm,AB=57 mm,OE=6 mm,OD=28 mm,OF=15 mm,EB=38 mm,BD=AC=20 mm。曲柄摇杆机构的判别条件为最短杆(OE也是连架杆)长度与最长杆(BE)长度之和小于或等于其他两杆长度之和,OE+BE=44 mm<机架OD+BD=48 mm,可以判定杆OE、EB、BD、机架OD构成曲柄摇杆机构。
2.2 中间腿导杆机构的运动学研究
2.2.1中间腿机构的运动描述
中间腿机构原理图如图2(b)所示,中间腿机构的连杆OE、OF、摇杆EF(中间腿2)、滑块组成了平面导杆机构:OF为固定机架杆;连架杆OE为驱动曲柄,绕着O点做旋转运动;滑块在F点绕F点摆动;摇杆EF一端连接F点绕滑块滑动,另一端连接E点,随驱动曲柄OE杆转动,实现摇杆EF上下、前后运动。
2.2.2中间腿导杆机构数学模型
已知曲柄lOE和机架杆lOF的长度,原动件曲柄lOE的初始位置角度为θ1,角速度为ω,且以逆时针方向为正;杆lEF的转角设为θ4、角速度设为ωEF、角加速度设为αEF。如图3所示,将中间腿导杆机构当作一个封闭矢量多边形,建立其多边形位置方程:
lOF+lOE=lEF
(1)
再将矢量方程式(1)向直角坐标系投影,其分量形式为:
(2)

(3)
则步行机构的行走步长=2(lEF+lEH)sinθ4。
2.2.3中间腿机构的运动分析
取曲柄lOE在0°、180°的水平位置和90°最高点、270°最低点时,计算杆lEF(腿2)的角度θ4,以便分析杆lEF的运动轨迹。当曲柄lOE处于水平位置,即θ1=0°时,杆lEF处于后摆的极限位置,根据以上公式可计算出杆lEF向后的最大摆角θ4=21.8°;同理,当θ1=180°时,杆lEF处于前摆的极限位置,向前的最大摆角θ4=21.8°。由此可知杆lEF的摆动角范围为43.6°,据此可以计算出步行机构的行走步长约为25.4 mm。
中间腿导杆机构摆动动作轨迹描述如下:当曲柄lOE从水平位置θ1=0°到最高点θ1=90°时,杆lEF从后摆极限位置开始向前摆动,且向上运动到达最高点位置;当曲柄lOE转动至θ1=180°时,杆lEF(步行腿2)摆动至最前位置;曲柄lOE转动至θ1=270°最低点时,杆lEF向后运动,与此同步,末端H点落地拖着行走装置并推动其前行;曲柄lOE转动至水平位置θ1=360°时,杆lEF开始向后摆动,同时下端H点脱离机体,并向后摆动至最大位置;如此交替,与前后腿一起实现步行运动。因此,该步行腿机构可通过改变曲柄lOE的长度和杆lEF末端延伸点H的位置来改变行走步长。
2.3 前后腿双摇杆机构的运动学研究
2.3.1前后腿机构的运动描述
前后腿连杆机构原理如图2(a)所示,连杆AC、AB、BD、机架CD构成双摇杆机构,即前、后腿运动时,前、后腿上各个对应点的运动规律相同,如腿1上A点与腿3上B点的运动轨迹完全重合;同理,腿1上G点与腿3上I点的运动轨迹完全重合(G点为杆AC的外伸端点,H点、I点同理)。因此,只需对前腿或后腿机构进行研究即可。
本文选取后腿(腿3)机构进行研究,其原理如图2(c)所示,曲柄OE、连杆EB、摇杆BD(后腿3)和机架OD组成了后腿曲柄摇杆机构。曲柄OE一端与传动轴直接连接传递动力,另一端在E点与杆BE连接;连杆BE一端随曲柄OE转动,另一端带动摇杆BD绕D点前后运动。
2.3.2建立后腿机构数学模型
已知设定的四连杆lOE,lEB,lBD和lOD的长度,原动件曲柄lOE的初始位置角度为θ1、角速度为ω,且以逆时针为正;杆lEB、杆lBD的转角分别设为θ2和θ3,角速度分别设为ωEB和ωBD,角加速度设为αEB和αBD。如图4所示,将后腿曲柄摇杆机构当作一个封闭矢量多边形,建立其多边形位置方程式:

图4 后腿曲柄摇杆机构矢量多边形
lOE+lEB=lOD+lBD
(4)
以复数形式表示为:
lOEeiθ1+lEBeiθ2=lOD+lBDeiθ3
(5)
由欧拉公式得:
lOE(cosθ1+isinθ1)+lEB(cosθ2+isinθ2)=lOD+lBD(cosθ3+isinθ3)
(6)
在直角坐标系中分别投影的分量形式为:
(7)
解方程组得:
Acosθ3+Bsinθ3+C=0
(8)

由式(8)得:
(9)
每当曲柄lOE绕O点转动1圈,便与摇杆lEB相遇重合2次,这2次杆lBD所处位置的夹角即为杆lBD的最大摆动角度。根据上述方程组可求得θ1=19.7°、θ3=47.8°或θ1=218.2°、θ3=98.2°;杆lBD的最大摆角为50.4°。
2.3.3后腿机构的运动分析
假设lOE从旋转点O右边水平位置0°启动,取其逆时针旋转1周时的6个运动位置,即选取lOE在旋转点O右边0°和左边180°时的水平位置、上边顶点90°和下边最低点270°时的竖直方向位置、与摇杆lEB相遇重合时的2个位置,计算出杆lBD分别处于这6个位置时的角度θ3,其值见表1。

表1 lBD角度θ3随lOE角度θ1的变化值
由表1可得出,曲柄lOE在位置2时,lBI(步行腿3)角度θ3最小,为47.8°,lBI(步行腿3)到达前摆极限位置;曲柄lOE在位置5时,lBI(步行腿3)角度θ3最大,为98.2°,lBI(步行腿3)到达后摆极限位置;lBI(步行腿3)的摆动角范围为50.4°。得出lBI(后步行腿3)的角度值θ3后,即可计算出lEB的角度θ2,也可以计算得到连杆BE的长度。
后腿机构摆动动作轨迹如图5所示,其中,lBD末端点I运动轨迹描述如下:假设lOE从右边水平位置0°启动,取其逆时针旋转1周时的6个运动位置。从图5运动轨迹可以看出,曲柄lOE从第1次重叠位置2运动到第2次重叠位置5时,lBI(后步行腿3)末端点向后摆动,与此同步末端I点落地拖着行走装置并推动其前行移动。lBI(后步行腿3)的前后摆动范围为50.4°,行程约22.8 mm。因此,该行走装置可通过改变杆lOE长度或杆lBD末端着地点I的位置来调整步长。lOE从位置5旋转到位置2时,lBI(后步行腿3)末端开始腾空向前摆动,完成腾空迈步动作,循环交替与中间步行腿完成行走动作。
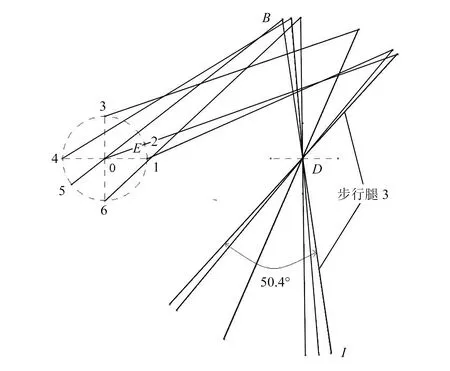
图5 后腿机构摆动轨迹
3 步行装置ADAMS仿真分析
在ADAMS/VIEW工具菜单中,设置步行腿装置各连杆尺寸、预设位置和连杆材料特性,建立步行腿装置几何模型,并在各装置连杆之间添加旋转运动副;在ADAMS-Simulation工具菜单中设置驱动电机转速为25 r/min,给源动件曲柄lOE施加一个ω=150 (°)/s的转动速度。
设置终止时间步长Step=200、S=15 s,进行步行腿模型运动仿真测试。通过仿真测量可得到步行腿各连杆杆件的实时运动特征,如lBD角度随曲柄lOE角度变化的测量曲线,如图6所示。

图6 lBD(步行腿3)角度随曲柄lOE角度变化的测量曲线
由ADAMS仿真分析得到的lBD角度随曲柄lOE角度变化的测量曲线说明:步行装置运行平稳,模拟测试结果与理论模型分析结果一致,符合设计要求。
4 样机制作
根据以上运动分析所设的各连杆尺寸,选取直径约为2.5 mm的金属铜线作为结构框架和连杆制作材料;再根据预期的步行速度选择合适的电源、电机型号及传动齿轮等,制作单电机单曲轴驱动的园林机器人步行装置样机。该步行装置长57 mm、高48 mm、宽42 mm,行走速度约为52 mm/s。机体行走试验结果表明:该步行装置各构件的预设尺寸、位置没有发生干涉,设计方案、机构原理可行,运动学分析结果可用,可以用于景观园林巡监机器人的设计。

1—机体;2—电源;3—前步行腿;4—齿轮;5—传动轴;6—驱动电机;7—曲轴;8—中间步行腿;9—后步行腿;10—电源线
5 结束语
本文设计了一种园林巡监机器人步行装置,该行走装置的先进性和创新点主要有:1)取材方便,以常见的金属铜线或铁线为设计、制作原料,以曲柄摇杆机构和曲柄滑块机构为传动系统和协调控制系统,只需1部电机和1根曲轴即可驱动整机运动;2)6条步行腿虽然为仿哺乳动物直立式腿部结构,内收直立且位于躯体下方,但行走运动仍然采用三角形步态设计原理;3)该机驱动电机少、价格低、组装简单,可大大降低制造装配中驱动电机的数量和原材料成本。
猜你喜欢
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
机电工程技术(2020年2期)2020-03-26
设备管理与维修(2019年22期)2019-12-19
课外生活(小学1-3年级)(2017年4期)2017-05-22
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
中国卫生(2015年6期)2015-11-08
中国卫生(2014年11期)2014-11-12
油气田地面工程(2014年5期)2014-03-09
