基于机器人的汽车半轴锻造自动化设计
2021-09-10 07:22张小光
内燃机与配件 2021年4期
张小光

摘要:工业自动化作为现代先进工业科学的核心技术,是工业现代化的物质基石和重要标志,采用工业机器人不仅能够提高产品质量,更能提高生产效率。随着我国汽车行业的快速发展,对汽车零部件的需求量日益增加。目前汽车半轴的锻造过程中需要多人协调工作,而且劳动强度大,所以对汽车半轴加工过程的自动化改造大有益处。本设计在不改变油压机现有布局位置的前提下,通过对上料工装、耐高温夹具、机器人的选择、控制流程的开发,实现汽车半轴锻造的自动化生产。降低工人的劳动强度、节省人力资源、提高生产效率。通过本设计为锻造机的自动化改造提供参照方案,提升自动化生产水平。
关键词:机器人;锻造机;自动化改造;工业4.0;集成系统
0 引言
随着社会的发展,劳动力成本越来越高,制造行业不得不迎来全面的自动化改型变革,机器人也随之加速进入制造行业[1]。使用机器人替代人工已在各个行业逐渐展开,尤其是在劳动环境差、劳动强度大、节拍快、制造精度高的行业[2-3]。汽车半轴制造主要包括加热、锻造两个工序,本设计通过对加热炉和锻造机的控制程序进行改造,增加上料台、机器人和下料台等设备,实现自动化生产,节约人工成本,降低烫伤等风险。
1 总体布局模型
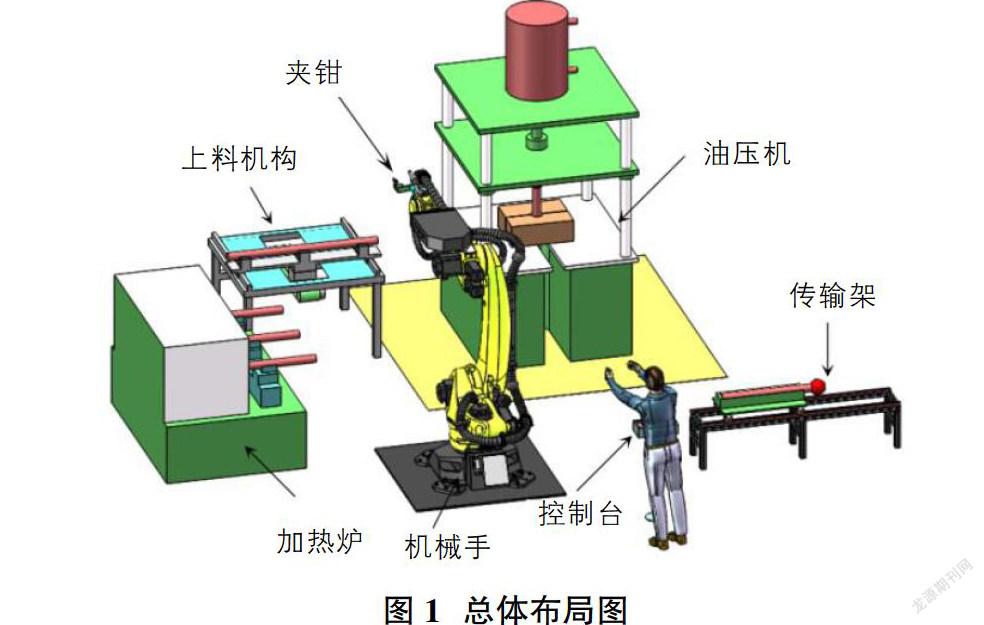
总布局图1中主要有油压机、上料机构、加热炉、夹钳、机械手和传输架,通过上次对现场的尺寸测量和实际情况确定上述布局方案。通过对加热炉的位置进行适当的调整,将机械手放在油压机和加热炉中间的适当位置,这样不仅可以确保各个工序在机械手的运动范围之内,而且减小机械手的运动行程,提高加工节拍[4]。
2 机构简介
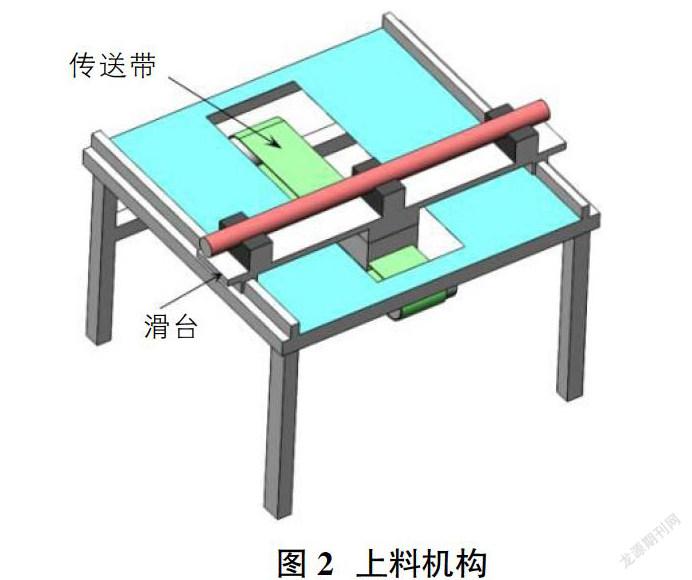
2.1 上料机构
生产现场中,由于半轴棒料放在加热炉左侧的位置,半轴棒料较长,移动加热炉之后,空间不足,棒料的摆放位置受到限制,所以上料机构的高度要高于加热炉中棒料的水平高度,让机械手从上方抓取棒料,然后放进加热炉中。
上料机构中主要包括支架、滑台、传感器、电机和传送带等,利用电机带动滑台进行传动。安装一个传感器,传感器检测机械手所要夹持的位置是否有棒料,如果有棒料会给机械手一个信号,可以夹持棒料。
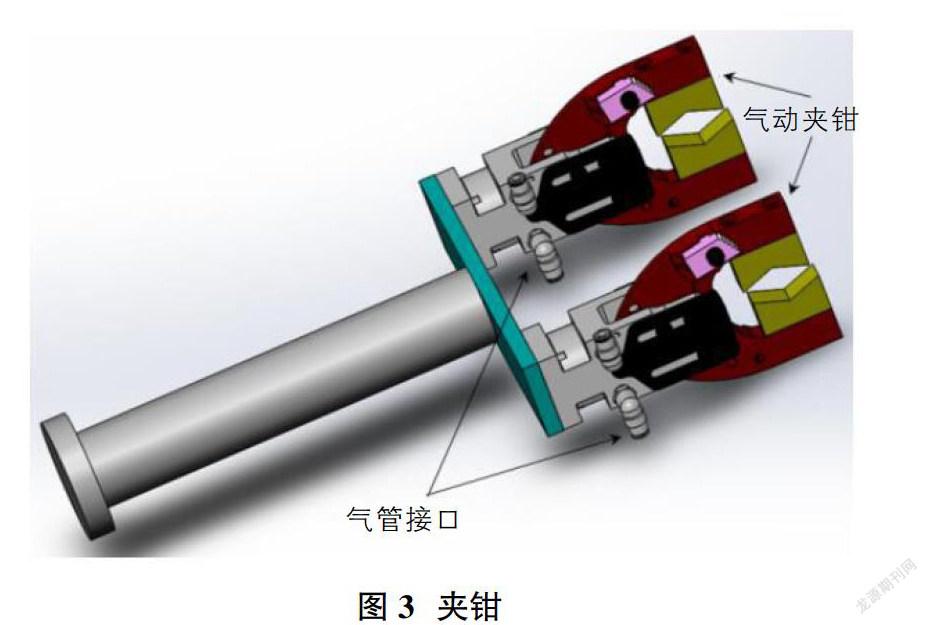
2.2 夹钳
在本项目因为油压机放棒料的位置较深、棒料较重,油压机深处达到440mm,而且放料口较窄,开口的大小为200mm,所以使用的夹具必须细长,才能满足机械手能把棒料夹住并放进油压机中。
加工的棒料最重为m棒=40kg,机器人运动过程中的最大加速度为a=0.5g,通过资料查的钢与钢的滑动摩擦系数为u=0.15,经过计算得出最小夹持力为3920N。
本项目采用两个夹具,安装在同一钢板上,单个夹钳最大夹持力为220kg,两个夹钳的最大夹持力为4312N,大于最重棒料所需要的夹持力。
2.3 传输架
本项目所设计的传输架总长度为2500mm,宽度300mm,采用伺服电机控制,同步带宽度50mm,输送能力50KG,定位精度0.1mm。
3 控制过程
3.1 控制流程
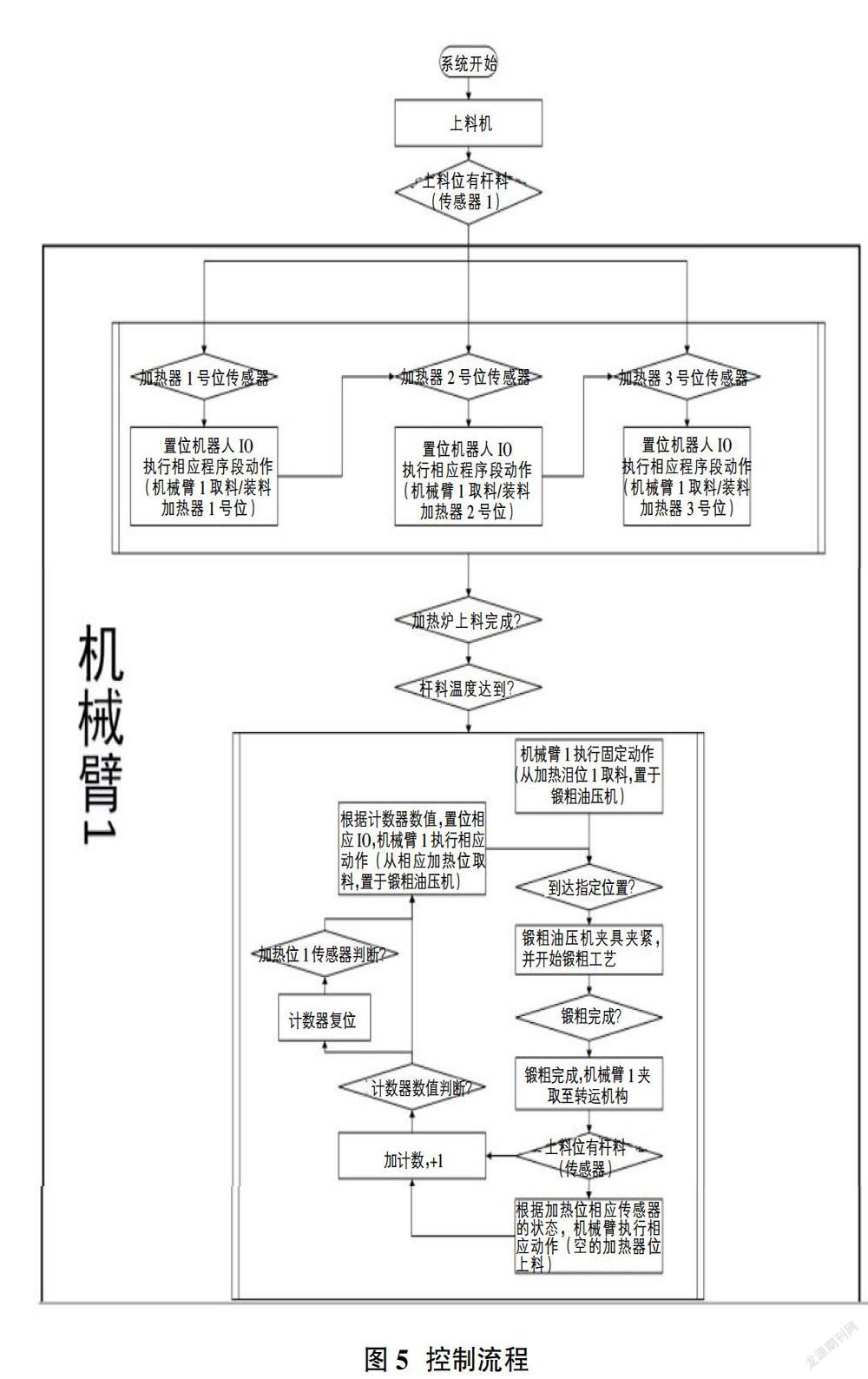
汽车半轴的自动化设备主要体现在自动上料、机械手夹取棒料、给加热炉送料、把加热好的棒料放入油压机中、取出油压机中的棒料、输送到下一工序。具体的机械臂的运动过程及加工工序的流程图如图5所示。
3.2 所用传感器
①上料机构:主要是控制升降气缸和检测上料机构末端是否有棒料放入,传递给机械手一个信号[5]。②加热炉:检测加热孔是否有棒料,控制机械手放棒的位置,确保不损坏加热炉。③油压机液压夹紧装置:主要是检测棒料是否被夹紧,加紧之后传递给机械手继续下一个运动的信号。④油压机升降柱:升降柱抬起之后,机械手夹取棒料,液压夹紧装置松开,取出棒料。⑤气动夹具处:检测夹具是否夹紧棒料。
3.3 加工节拍
根据现场实际尺寸的测量,按照现有布局的实际情况,对运动节拍进行了模拟,对上料机构到加热炉、加热炉到油压机、油压机到上料机构、油压机到传输架、传输架到加热炉进行了实际的模拟。计算出来整个工序的时间为41.44秒,相比目前人工180秒的时间缩短了很长时间,极大的提高了生产效率。
4 结语
通过本设计,提高了企业自动化生产水平,实现汽车半轴的自动化生产。机器人取代人工生产具有以下方面的优势:①节约操作工人数:通过自动化设备的使用能够减少本工序的用工人数,从原先的该工序需要6人,减少到使用一名工人。②提高生产效率:机械手作业与人不同之处在于,机械手可以24小时不停歇的作业,提高生产产量[6]。③保证产品质量:机械手的精度较高,重复定位精度达到正负0.06mm,远高于人工作业的精度。④降低勞动强度:汽车半轴棒料的质量为10-40kg,每天生产量在1000多个,对于劳动者来说,劳动强度过高,使用机械手自动设备之后能够减少工人的劳动强度。⑤提高企业的自动化水平:自动化是衡量制造业水平的一个标准,引进自动化设备不仅能够提升加工制造的实力,而且能够增加产能[7]。
参考文献:
[1]刘建光,李仕威,段海峰.应用于工业机器人的数控车床的自动化改造设计[J].机械工程师,2017(6):79-80.
[2]陶婕.工业机器人在数控机床中的运用实践研究[J].科技风,2020(07):165-166.
[3]陆晨芳,宋鹏,丁中华.基于工业机器人和数控车床的自动上下料工作站[J].机械制造,2019,57(12):45-47.
[4]陈运军.基于工业机器人的“智能制造”柔性生产线设计[J].制造业自动化,2017,39(08):55-57.
[5]徐永谦,周谦,罗俏.多数控机床机器人上下料系统[J].机床与液压,2015,43(15):47-50.
[6]李平,陈启愉,段先云,陈浩,邓志文,廖菲.基于工业机器人的板材自动上下料系统研究[J].机电工程技术,2016,45(08):4-6.
[7]陈婷婷.4R多关节轮毂加工上下料机械手的运动分析与研究[D].沈阳工业大学,2012.
猜你喜欢
交通科技与管理(2021年13期)2021-09-10
河南科技(2020年36期)2020-06-10
汽车实用技术(2019年1期)2019-10-21
石油研究(2019年2期)2019-09-10
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01
卷宗(2016年11期)2017-03-24
科学与财富(2017年5期)2017-03-17
农民致富之友(2016年9期)2016-07-09