
自抗扰控制在伺服系统中的应用研究
2021-09-10 09:13:44陈佳楠
科技研究 2021年7期
陈佳楠


摘要:本文引进了自抗扰控制技术(ADRC)来对PMSM进行控制。分析了自抗扰控制器的各组成部分,并针对PMSM设计了控制器。通过MATLAB平台进行数字仿真,验证了ADRC控制器较传统PID控制器在抗干扰方面等具有明显优势。
关键词:自抗扰技术;永磁同步电机;应用研究
一、自抗扰技术
⒈自抗扰控制技术的发展
所谓控制就是给被控系统施加适当的控制量使被控输出要按期望轨迹或目标值运动,如何实现控制目标一直有着两种不同的思路:
其一是根据输入输出的信息来确定被控对象的“输入—输出关系”,即进行系统建模,然后根据这种关系来决定所需的控制力的思想;
其二是直接根据输入输出的信息结合设定信息来决定所需控制力,即根据期望值与实际值之间的误差信息来决定消除这个误差的控制策略,而这一策略即为误差反馈策略,这也就是“基于误差消除误差”,就是经典PID调节方法。
经典PID控制的最大优点在于它只依靠设定目标和实际值之间的误差,控制量是根据这个误差来确定的,它不需要知道对象的模型。
经典PID的缺点有需要经常调节PID增益;PID控制的闭环系统的“快速性”与“超调”出现了不可调和的冲突;实际只用到了PI控制(无误差微分反馈);是效率最高、最好的组合方式;积分反馈的抑制能力又不显著。
本章节将从以下几个方面介绍自抗扰控制器的组成:
⑴跟踪微分器(TD)
这种跟踪微分器几乎可以实现对任意信号的跟踪和微分,它的离散形式,不仅可以消除颤振现象,而且还有动态响应快、稳态精度高的优点,因此在安排过渡过程、配置系统零点、数字整流及检波、频率估计、剔除野值以及预报方法等场合得到了广泛的应用。
⑵扩张状态观测器(ESO)
扩张状态观测器是自抗扰控制器最重要的组成部分之一,它不仅可以对系统的状态变量进行估计,同时,还可以估计出系统的扰动(包括系统运动时所受到的各种外扰以及系统机理本身所决定的内扰),同时予以实时补偿。扩张状态观测器除了用于自抗扰控制器外,还可以应用于其它领域中。
第2章 非线性反馈
反馈机制的引入可以使系统的性能在很大程度上按照操控者的意愿得到改善,反馈机制可使线性受控系统转变成为非线性受控系统,反之,在某些条件下也可使非线性受控系统转变成为线性受控系统,从而可以使受控系统中的线性和非线性之间的界限变得模糊起来。反馈机制(尤其是负反馈)同时还可以抑制微小的不确定扰动,但是不同的反馈机制在抑制扰动的能力有很大不同。
二、基于ADRC的PMSM控制
⒈自抗扰控制器的设计
ADRC的结构框图如图所示
则上式可写为
用来观测总扰,并使,就可将原来系统转变成为线性积分串联型系统,从而加以控制。针对实际要求,我们设计如下跟踪微分器:
其中,是积分步长,是速度因子,是滤波因子,为系统的参考输入,可跟踪输入信号,则得到输入信号的微分近似信号。
⑴扩张状态观测器的设计
根据非线性扩张状态观测器的效率远高于线性状态观测器,我们设计了如下三阶扩张状态观测器:
式中,是系统状态,是扩张状态观测器的输出,可跟踪系统的状态跟踪系统的状态,是估计系统的内部扰动和外部扰动的总和,则是算法中要调的三个参数,是由系统的状态所决定的,为状态误差,为系统的输出,为系统的控制量。
为避免稳态时的高频振荡,我们引入和函数。利用合适的非线性函数及参数,可以从输出信息变化中提炼出作用于系统的总扰的实时作用量。
⑵非线性反馈的设计
在非线性反馈之中,非光滑非线性反馈的效率又要高于光滑非线性反馈,光滑非线性反馈抑制外扰的效率远比非光滑非线性反馈差。
基于以上原因,设计如下非线性反馈:
⑶控制量b的设计
非线性误差反馈中是根据误差来决定,再将控制量取做,这样就可以将原来的非线性系统转变成为线性的积分串联型控制系统,其中为决定补偿的强弱的“补偿因子”。
⒉自抗扰控制器的参数调节
我们需要调节的参数包括跟踪微分器里面的是速度因子,是滤波因子,扩张状态观测器里面的,控制量。
三、自抗扰控制系统性能分析
为了验证自抗扰控制器的实际性能,分别比较自抗扰控制器和PID控制器在永磁同步电动机的空载启动,加载启动,正反转以及突然加载等情况下的仿真波形,分析自抗扰控制系统的动态性能。
第4章
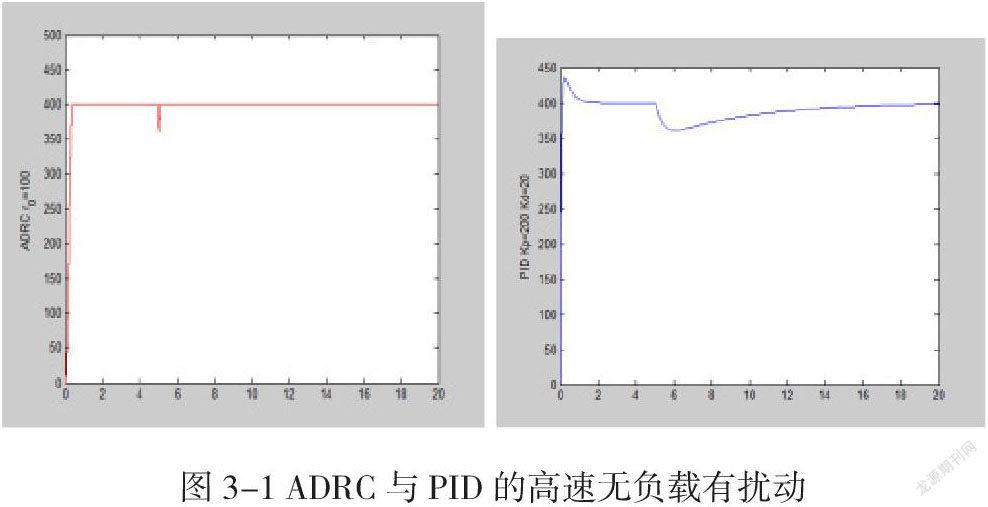
在转速为400r/s(即高速)时突然加负载干扰,转速的仿真波形如图3-1所示。ADRC控制系统转速动态速降略小于PID控制系统,并且ADRC控制系统调整时间远小于PID控制系统。
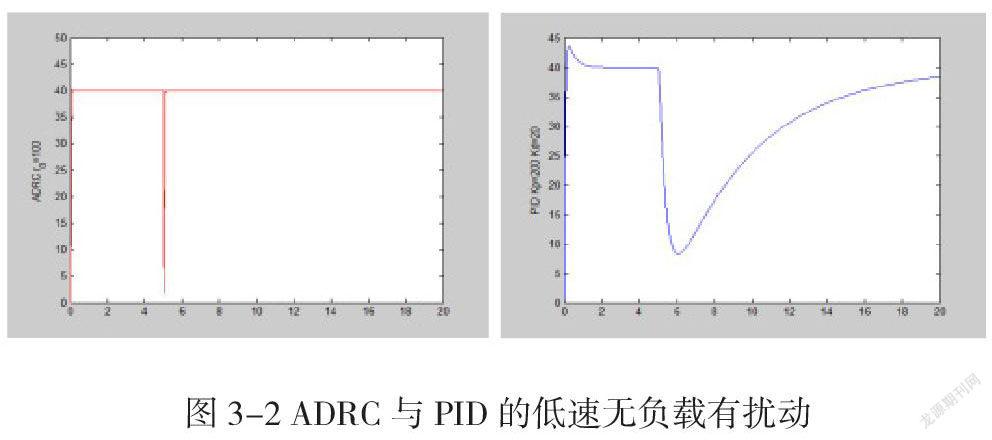
⑵转速为40r/s(即低速)时,得到图3-2,ADRC控制系统和PID控制系统转速动态速都很大,但ADRC控制系统调整时间远小于PID控制系统。
结论:利用自抗扰控制理论来对PMSM系统进行调速控制,利用自抗扰控制系统的重要环节——扩张状态观测器来精确观测到内扰和外扰的总和,即总扰,并给予实时补偿,仿真结果表明了自抗扰控制系统的抗干扰性能远优于PID控制系统,在实际能满足的条件下,通过调节跟踪微分器的参数,可以使ADRC的快速性得到很大的提高,且其“快速性”與“超调”之间不存在矛盾。
参考文献:
[1]线性自抗扰控制在雷达伺服系统应用[J].金亮亮,杨瑷霞,刘亚云.雷达科学与技术.2017(05)
[2]线性自抗扰控制理论及工程应用的若干进展[J].陈增强,程赟,孙明玮,孙青林.信息与控制.2017(03)
中国石化青岛炼油化工有限责任公司 山东 青岛 266500
猜你喜欢
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
中国科技博览(2016年22期)2016-11-01 18:20:31
中国科技博览(2016年19期)2016-10-19 14:10:37
电脑知识与技术(2016年21期)2016-10-18 22:57:58
科学与财富(2016年28期)2016-10-14 18:20:19
科学与财富(2016年28期)2016-10-14 03:23:29
考试周刊(2016年76期)2016-10-09 08:38:18
中国科技博览(2016年15期)2016-08-23 00:59:37
