基于行人行为与优化CTAM模型的全自动驾驶车辆行人接受度分析
2021-09-09 08:39裘梦琪周竹萍梅亚岚
交通运输研究 2021年4期
裘梦琪,周竹萍,梅亚岚
(南京理工大学,江苏 南京 210094)
0 引言
自动驾驶是未来交通工具发展的重要方向,它是对人工驾驶的补充或替代,旨在提升交通安全和效率。当前,国内外汽车制造商和科研机构等正在技术上不断创新和优化,积极投身于自动驾驶领域[1]。然而,目前用户对全自动驾驶车辆的接受度并不明朗。纵观以往的研究,从驾驶员或乘客角度展开的“人机混驾阶段”自动驾驶相关研究较多[2-6],而针对行人对自动驾驶车辆接受度的研究成果则相对较少。事实上,我国城市道路交通环境复杂,人车混行对自动驾驶车辆安全性提出了更高的要求,展开行人对全自动驾驶车辆的接受度研究很有必要。
目前,从行人角度出发的已有研究集中于自动驾驶车辆对行人的识别及人车交互。Combs 等人[7]创建了适合自动驾驶的传感器对行人进行检测,较大程度降低了车辆与行人碰撞的概率。Woodman 等人[8]在虚拟环境中研究自动驾驶车辆间行人过街间隙接受情况。Gupta 等人[9]提出了自动驾驶车辆与行人协商谈判模型,该模型能有效缓解交叉口拥堵问题,减少车辆和行人的等待时间。但已有研究中涉及行人行为的相对较少。Deb等人[10]对482名受访者展开了行人对自动驾驶车辆接受度问卷调查,发现采取遵守交通规则等积极行为的行人认为自动驾驶车辆会提升系统整体的交通安全,违规较多的行人会更加自信地过街。国内行人过街有不同的特性,周钊等人[11]调查发现,市民对过街违规行为具有从众心理。高纯等人[12]在行人过街中发现较多行人等红灯或过街时喜欢玩手机,容易分神不注意交通环境。这表明若全自动驾驶车辆要在国内普及,对其行人行为认知要求更高。同时,行人对自动驾驶车辆的接受度也很重要。Xu 等人[13]采用技术接受模型对国内大学生进行调查,发现感知有用性、信赖及感知安全对自动驾驶车辆接受度有直接影响。Zhang 等人[14]通过技术接受模型发现信任和感知有用性决定受访者对自动驾驶车辆的使用意愿。但目前没有将行人行为和行人对自动驾驶技术接受度相结合的研究。
因此,本研究基于问卷调查,充分结合行人行为,对行人对全自动驾驶车辆的接受度进行建模分析,探寻行人的关注点,以期为全自动驾驶技术改进提供理论支持,为全自动驾驶车辆的设计与生产提供参考。
1 优化的车辆接受度模型
1.1 CTAM模型
Davis[15]采用理性行为(Theory of Reasoned Action,TRA)模型预测行为态度和社会态度两大因素对技术接受行为意图的影响,并提出了技术接受模型(Technology Acceptance Model,TAM)。TAM较专注于技术的接受度,但Ajzen[16]提出了计划行为理论(Theory of Planned Behavior,TPB),该理论表明行为意图能预测实际行为。随后,Venkatesh 等人[17]创建了技术接受和使用统一模型(Unified Theory of Acceptance and Use of Technology,UTAU),该模型进一步分析了年龄、性别、经验和自愿性对接受使用的影响。Osswald 等人[18]提出了车辆技术接受模型(Car Technology Acceptance Model,CTAM),用于衡量用户的感知有用性、感知易用性、使用意愿、实际使用行为和外部变量因素对信息技术接受和使用的影响。
1.2 优化的CTAM模型
本文将车辆技术接受模型(CTAM)进行优化,将感知有用性和感知易用性细化为感知态度、信任、效率这3 个维度,添加外部因素兼容性。设计感知态度、效率、信任和兼容性相关问题并筛选,最终确定优化的CTAM模型主要变量。
行人对全自动驾驶车辆的行为态度受感知有用性和感知易用性的影响。其中感知有用性包括感知态度A1,A2和A3、效率E1,E2和兼容性C1,感知易用性包括感知态度A4、信任T1,T2,T3及兼容性C2,兼容性为外部变量。目前我国全自动驾驶车辆还未真正实现,故使用意愿仅考察行人是否接受自动驾驶车辆,无实际使用行为。优化的CTAM 模型变量关系如图1 所示,变量组成如表1所示。

图1 优化的CTAM模型变量关系图

表1 变量组成表
2 问卷设计及分析
2.1 基于行人行为与优化CTAM模型的问卷设计
本次调研以Deb 等人[10]提出的问卷为基础,结合优化的CTAM 模型和现场行人行为调查重新设计问卷。
首先,现场调查观测南京中山门大街—罗汉巷交叉口早高峰行人过街行为。调查中发现,青少年男性、青少年女性和中年男性在交通堵塞时更倾向于横穿马路且随意性大;年轻人在过街时存在交谈、低头玩手机或听音乐的现象;有通勤者为赶时间而随意横穿马路。根据调查区域现场观测结果,将行人过街行为分为违规行为、过失行为和积极行为3类,其中违规行为指违反交通法规的行为,如闯红灯、斜穿交叉口等;过失行为指行人因疏忽大意或过于自信而判断失误等导致的主观行为,如随意过街、因赶时间或思考事情没注意交通环境横穿马路等;积极行为指行人主动让行。
最终,行人调查问卷由3 部分组成:①个人信息采集,包括性别、年龄和学历等;②行人过街行为自我判断,调查违规行为、过失行为和积极行为这3 类行为的经常性;③行人对全自动驾驶车辆技术接受度调查,主要调查行人对全自动驾驶车辆的系统自动化、效率等的态度和信任度。问卷通过预调查进行了修正和完善,最后确定了27道题,在2020年8月进行了为期两周的正式调查。
2.2 数据获取
本次问卷调查对象为线上随机受访者和南京市城市道路上的行人,采用随机抽样调查法,通过在线调查和实地调查相结合的方式获得结果。共有310 名受访者参与了本次问卷调查,线上收集172 份问卷,实地收集138 份问卷。其中,有5份问卷因答案不完整或回答不准确而作废,问卷有效率为98.38%。有效的305 份问卷中,男性受访者共175 名,女性受访者共130 名。受访者的年龄分布为18~75 岁,40.2%的受访者处于22~30岁年龄段,大部分受访者受过中高等教育。受访者的年龄和教育水平分布分别如图2和图3所示。

图2 受访者年龄分布图

图3 受访者教育水平分布图
大多数受访者居住在城市,占总人数的76.5%,少部分居住在乡镇。受访者日均出行次数分布均匀,每日出行1~2 次的受访者占36.4%,出行3~4 次的占29.6%,出行4 次以上的占34%。另外,大部分受访者(占比为76.5%)家庭拥有小汽车。因此,此次调查样本以中青年人群为主,拥有较高学历,有一定的经济基础,该群体也将会是自动驾驶车辆的消费主力。
2.3 数据分析
2.3.1 行人行为描述分析
基于调查问卷数据,71.6%的受访者认为自己遵守交通法规,从不或几乎没有过问卷中的违规或过失行为;38.64%的受访者会因为某些原因偶尔自信评估并执行问卷中提到的错误行为;保持积极态度、主动让行的受访者较多,占70.5%。这3类行为的经常性占比如表2所示。

表2 行人行为描述统计表
2.3.2 优化的CTAM模型描述分析
基于优化的CTAM 模型,根据行人对全自动驾驶车辆智能系统、操作效率、设备控制之间兼容性的态度和信任度对感知有用性和感知易用性的影响判断行人的使用意愿。55.8%的受访者对全自动驾驶车辆的效率和兼容性持支持和积极的态度,有19.9%的受访者保持中立。受访者同意度统计具体如图4所示。

图4 优化的CTAM模型各变量同意度百分比图
同时为明确感知有用性、感知易用性(包括外部因素)与变量之间的相关性,对变量进行双变量相关性分析表明:变量显著性均小于0.05,感知有用性和感知易用性与变量存在显著相关关系,且相关性都较强并呈正相关。
2.4 调查数据信度及效度分析
对问卷所获得的数据用SPSS24.0 进行信度、效度检验,结果如表3 所示。由信度检验结果可知,行人行为3个维度和优化CTAM模型4个维度综合结果超过了0.7,达到了可信的程度。由效度检验结果可以看出,KMO 和Bartlett 近似卡方值都达到了显著水平,验证了数据的有效性和可靠性。

表3 问卷信度及效度检验结果表
3 模型标定与影响因素分析
3.1 Logit模型构建
问卷按照李克特量表将行人对全自动驾驶车辆接受度划分为接受、一般和不接受3 个层次,且符合平行性检验,显著性水平为0.762大于0.05,故本次模型选用了有序Logit 模型。有序Logit 模型的常用方法是假设潜变量与预测因数存在线性关系,从而分析因变量的有序性。累积概率的有序多分类Logit模型如下:

式(1)中:j为程度类别,j=1,2,…,c-1,c为类别总数;x1,x2,…,xn为n个解释变量;β1,β2,…,βn分别为对应系数;kj是Y连续标度的一组切点;β′为X的系数集合,此时X为向量。
此时,行人接受全自动驾驶车辆的概率为:

式(2)中:i为行人对自动驾驶车辆接受度类别,对应式(1)中的j,i=1,2;ki为第i个等级的常数项;βi为接受度类别的自变量系数集合中的元素;xj为第j个自变量。
3.2 模型变量选择及处理
本文主要研究行人对全自动驾驶车辆的接受度,故因变量为行人的接受度,分为接受、一般和不接受3 种。而自变量主要为行人对全自动驾驶车辆接受度的影响因素,主要分为个人属性因素、个人行为因素和个人对全自动驾驶车辆技术接受度因素3类。
为方便回归分析,要先将因变量和自变量进行数值转化,具体如表4所示。

表4 模型变量转化表
3.3 模型输出
3.3.1 有序Logit模型极大似然估计
运用SPSS24.0软件对有序Logit模型进行极大似然估计,并采用逐步后退法对显著变量进行筛选。在置信区间为95%的情况下,显著性水平为0.05,故当显著性p<0.05时,表明该自变量对因变量有显著影响,并且若p值在0.05附近范围内,表明该变量仍有影响,具有统计意义。输出参数估计如表5所示。

表5 模型参数估计表
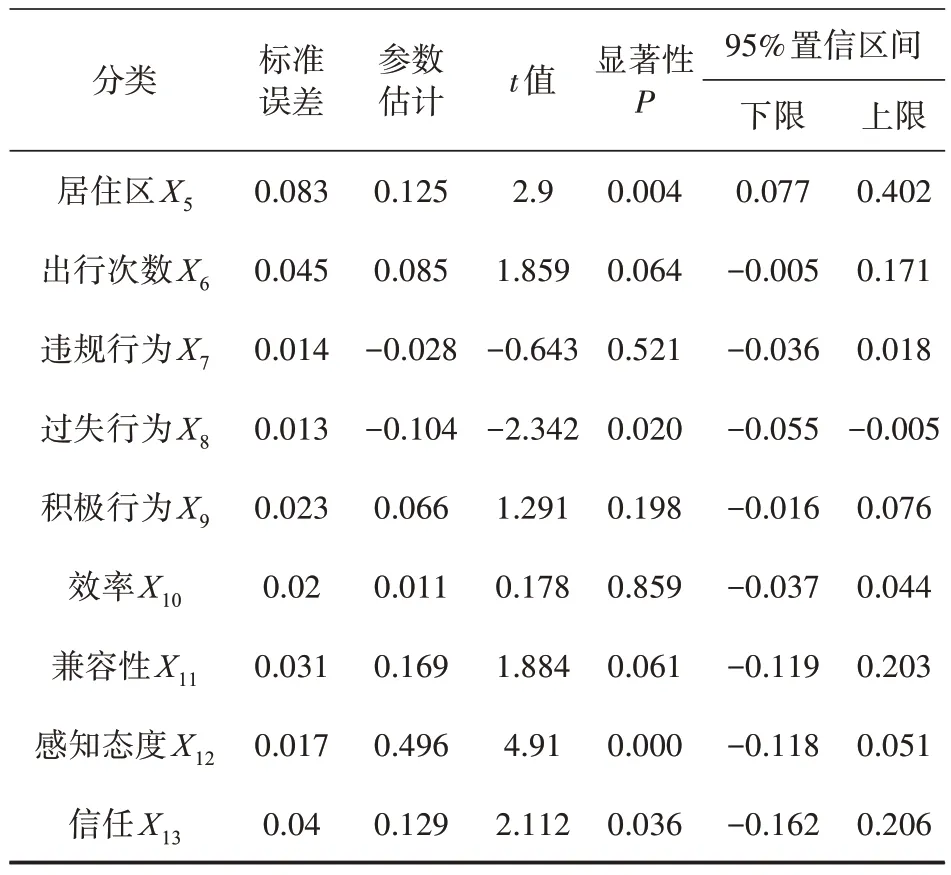
表5 (续)
从表5 可知,居住区、过失行为、感知态度及信任对行人对全自动驾驶车辆的接受度有显著影响,出行次数、兼容性的显著性较明显,其余变量显著性不明显。
3.3.2 有序Logit模型回归分析
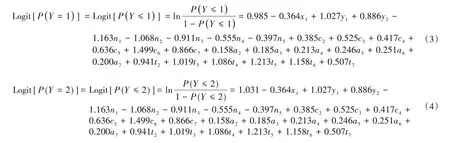
对过失行为X8、兼容性X11、感知态度X12、信任X13这些影响因素中的具体问题(如N1~N5,A1~A4等)再次筛选,将不满足显著性水平的自变量依次剔除,重新进行有序Logit模型回归,直至所有自变量的显著性水平符合要求[19],则回归过程结束,得出最终结果。将结果中各变量的回归系数代入有序Logit模型中,模型中各变量的解释如表6所示,最终确定的效应函数如式(3)和式(4)所示。

表6 模型表达式变量解释表
3.4 影响因素分析
3.4.1 个人属性影响分析
居住在城市的居民更容易接受全自动驾驶车辆,居住在乡镇的居民接受度是居住在城市的exp(-0.364)=0.694 倍。城市中交通基础设施建设较完善,居民出行更便捷,因而对全自动驾驶车辆的接受度也较高。但全自动驾驶车辆在城市的应用难度要大于在乡镇,因为需要更精准的系统和设备。日均出行次数的系数为正,日均出行次数4次以上被模型设定为0,日均出行1~2次的行人对全自动驾驶车辆接受度是4 次以上的exp(1.027)=2.793倍,日均出行2~4次的行人接受度是4 次以上的exp(0.886)=2.425 倍,故日均出行次数越少的行人对全自动驾驶车辆的接受度越高。
3.4.2 行人行为影响分析
在行人行为影响因素中,行人的过失行为显著性较明显。模型设定“很经常”这一可能性分类为0,故过失行为发生的可能性分类中,“从不”“几乎”“偶尔”“不经常”及“经常”分别是“很经常”的3.2 倍、2.9 倍、2.5 倍、1.7 倍及1.5倍。由于系数为负,所以过失行为越经常的行人越容易接受全自动驾驶车辆。在日常生活中,行人无意识的过街过失行为发生概率远大于违规行为。有该类行为的行人认为其在全自动驾驶车辆面前更容易得到安全保障,也更愿意相信全自动驾驶车辆的智能系统。
3.4.3 优化的CTAM模型影响分析
(1)感知态度
感知有用性主要由感知态度和效率组成,但主要影响因素为感知态度。数据分析表明,行人对全自动驾驶车辆感知态度越好,接受度也就越高,其中行人态度为“同意”的接受度最高,为“非常不同意”的exp(0.251)=1.285 倍。人们对全自动驾驶车辆技术的感知态度很大程度决定人们是否愿意相信全自动驾驶车辆技术,技术对交通系统的重要性越大、越能有效节省出行时间,则行人的感知有用性越高。
(2)信任
对行人而言,在过街时面对全自动驾驶车辆的心态和过街舒适度至关重要。由显著性水平可知,行人对全自动驾驶车辆的信任非常显著。“不同意”“不太同意”“一般”“比较同意”“同意”“非常同意”的接受度分别为“非常不同意”的exp(0.941)=2.562,exp(1.019)=2.770,exp(1.086)=2.962,exp(1.213)=3.363,exp(1.158)=3.184 及exp(0.507)=1.660 倍。行人对全自动驾驶车辆信任度越高接受度也越强,且会将全自动驾驶车辆推荐给家人、朋友。
(3)兼容性
兼容性对外部因素起决定性作用。行人越同意全自动驾驶车辆兼容性,越容易接受全自动驾驶车辆,其中“非常同意”是“非常不同意”的exp(0.866)=2.38 倍。这也表明了全自动驾驶车辆兼容性的重要性,兼容性越强,车辆本身的智能系统、操作系统、设备控制也就越强,其与交通环境的兼容关系也越紧密。
4 结语
本文基于建立的优化CTAM 模型和实际观测到的行人行为设计调查问卷,从个体属性、行人行为和行人对自动驾驶车辆技术接受度3 方面对行人展开随机调查。然后建立有序Logit模型,运用调查数据标定模型参数,筛选出行人对全自动驾驶车辆接受度的关键影响因素。经分析得出以下结论:中青年、具备中高学历且居住在城市的行人更容易接受全自动驾驶车辆;出行次数较少的行人越容易接受全自动驾驶车辆;行人对全自动驾驶车辆技术的感知有用性和感知易用性对接受度起了重要影响,主要表现在行人对全自动驾驶车辆的感知态度和信任上,行人对全自动驾驶车辆的感知态度越好,信任度越高,也就越接受全自动驾驶车辆;同时在外部因素的影响下,兼容性起着关键作用,这意味着行人对全自动驾驶车辆技术的接受度还受设备和设备之间、系统与系统之间、车辆与行人及道路之间兼容性的影响。在全自动驾驶车辆的研发上,不仅要注重车辆本身的设计,更要创新与行人的交互方式、提升与交通环境的匹配度。同时,除做好对全自动驾驶车辆的宣传外,也要加强对行人的交通安全教育。
本文基于理论框架和实证分析从行人角度分析行人行为和技术接受对全自动驾驶车辆接受度的影响,但在某些方面存在局限,如缺乏对未来消费水平、法律法规的完善与执行力度等因素的综合考虑,同时采用SP问卷调查获得的数据尚有一定的主观性。因此,未来可从更多维度研究自动驾驶车辆接受度的影响因素,并可在全自动驾驶车辆进入市场化前期采取试验与SP 和RP 问卷调查相结合的方式进行研究。
猜你喜欢
小康(2022年28期)2022-10-21
小康(2022年19期)2022-07-09
小康(2022年16期)2022-06-13
时代邮刊(2021年8期)2021-07-21
快乐语文(2021年15期)2021-06-15
意林(2021年5期)2021-04-18
童话世界(2020年13期)2020-06-15
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
扬子江(2019年1期)2019-03-08