高温气冷堆核电站蒸汽发生器管板定位机器人
2021-09-09 05:21:10胡卉桦
科学技术与工程 2021年22期
胡卉桦
(中核武汉核电运行技术服份有限公司, 武汉 430074)
核电站蒸汽发生器是核岛内最为关键的主要设备之一,是一回路与二回路的边界。蒸汽发生器的作用是将反应堆产生的热量传递给蒸汽发生器二次侧,加热水产生蒸汽推动汽轮发电机发电[1]。蒸汽发生器的运转是否正常直接影响电站的功率和效率,而且在进行热量交换时,还起阻隔放射性载热剂泄露的作用,对核电站安全至关重要[2]。蒸汽发生器传热管承担着主要的热交换功能,具有数量多、壁厚薄、工况条件恶劣的特点,容易发生腐蚀、疲劳、磨损等多种缺陷,故是核电站在役检查和维修的重点对象。
针对核电站蒸汽发生器传热管检修维护难度大的问题,美国、法国、日本、德国等发达国家较早开展了检修机器人应用研究。有代表性的机器人产品包括:美国Westinghouse公司的ROSA系列[3-5]和Pegasys[6]、法国Framatome公司的ROGER、Armis和COBRA[7-8]、日本三菱重工的MR系列[9-10]、德国Hans Walischmille公司的TELBOT[11-12]。机器人的结构形式主要有关节式和爬行式两种。随着AP1000等技术引进国内及机器人技术的发展,蛇形机器人、蠕虫式机器人及壁虎仿生机器人在未来也可应用于核电蒸汽发生器检修工作[13]。
高温气冷堆是中国自主设计研发的世界首座四代核电特征示范堆型,高温气冷堆属于一种新堆型,其内部结构不同于常规压水堆电站[14]。管箱结构复杂,其内部有较高辐射剂量,目前国内外暂无适用于该堆型的检维修机器人,采用人工方式维修有一定危险性,同时对维检人员操作技能的依赖度高,施工效率低并且不易保证工作质量。针对高温气冷堆蒸汽发生器结构特点及检修要求,现提出一种新型维修机器人实施方案,可搭载多种维修工具进行传热管堵管维修工作。
1 管板定位机器人系统设计
1.1 功能分析
蒸汽发生器传热管的完好性关系到电站运行的安全可靠,需要定期检测及维护。蒸汽发生器结构如图1所示,管箱人孔口直径Φ627 mm,小于管箱内壁直径Φ800 mm,入口处存在缩径,管箱室深度1 591 mm,几百个传热管在圆形管板上均匀排列,任意管孔与相邻管孔距离为27 mm,管孔整体呈轴对称形式布局。为了满足高温气冷堆蒸汽发生器堵管维修需求,机器人应能携带作业工具全覆盖管板孔,精确地将作业工具与管板孔对中并可靠固定。

图1 管箱及管板孔结构示意图
现提出的机器人运动结构采用圆柱坐标系形式,主要动作包含周向旋转、径向移动以及轴向伸缩运动。结构设计采用模块化、轻量化设计,可携带不同的作业工具,最大携带载荷22 kg,机器人整体质量不大于40 kg,单个模块质量不大于15 kg,机器人运动误差小于2 mm。
1.2 管板定位机器人运动特征
管板定位机器人的运动特征简图如图2所示,采用圆柱坐标系的运动形式,充分利用了管板在几何特征上的轴对称特征,利用旋转机构实现圆周运动,利用双轴驱动器实现径向的直线移动和前端定位锚的摆转,利用伸缩气缸实现定位锚轴向的前后伸缩,要求4个动作的组合能够驱动定位锚覆盖全管板管孔,并且不与管箱内壁发生碰撞。
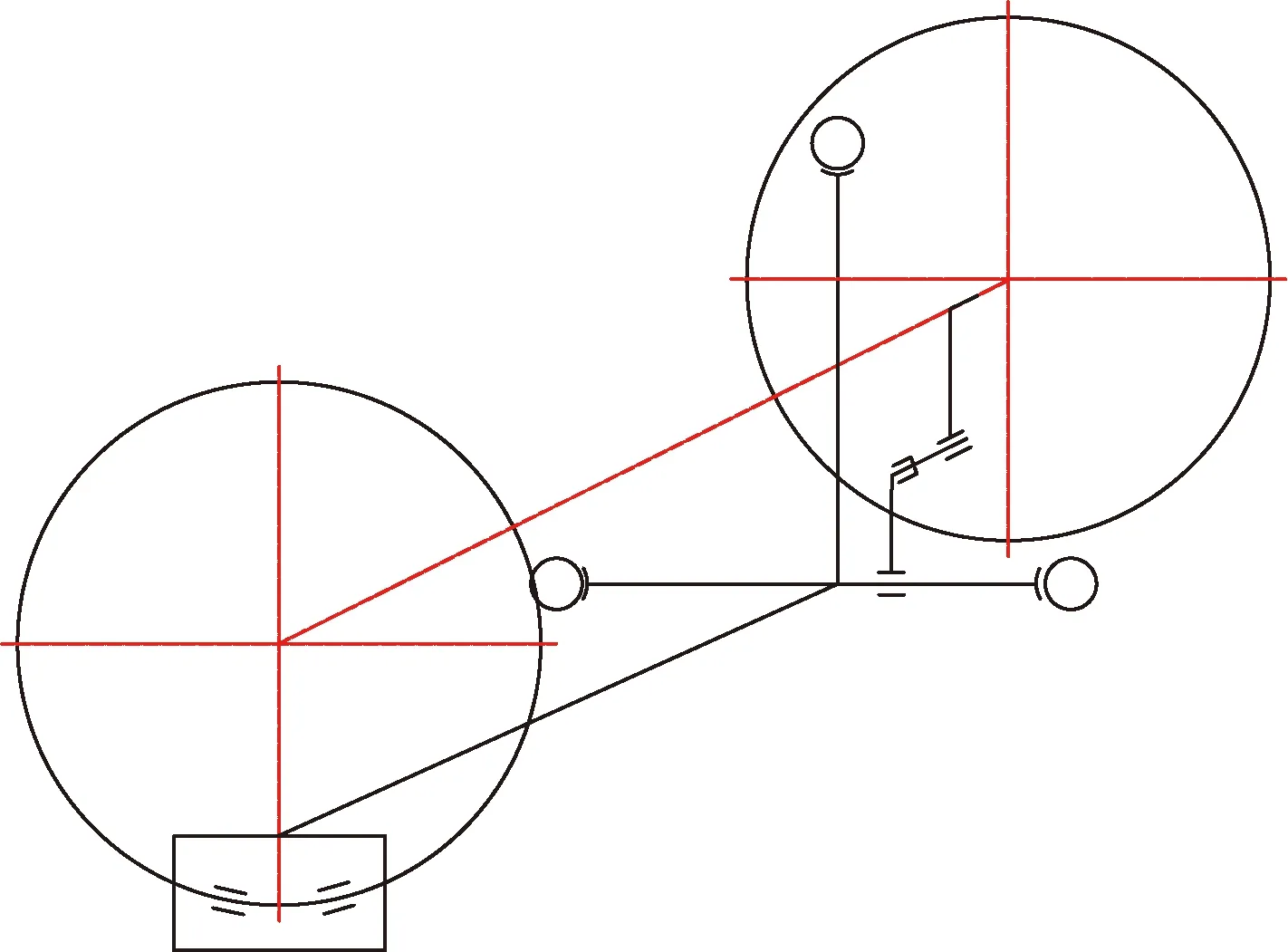
图2 机器人运动特征简图
1.2.1 总体设计
依据上述功能分析,管板定位机器人总体结构,由定位锚、姿态调整单元、折叠骨架以及旋转机构组成,如图3所示。定位锚通过快换盘连接在姿态调整单元上,姿态调整单元通过螺栓安装在折叠骨架的单轴驱动器上,折叠骨架通过转接板安装在旋转机构上。各个模块的说明如下。
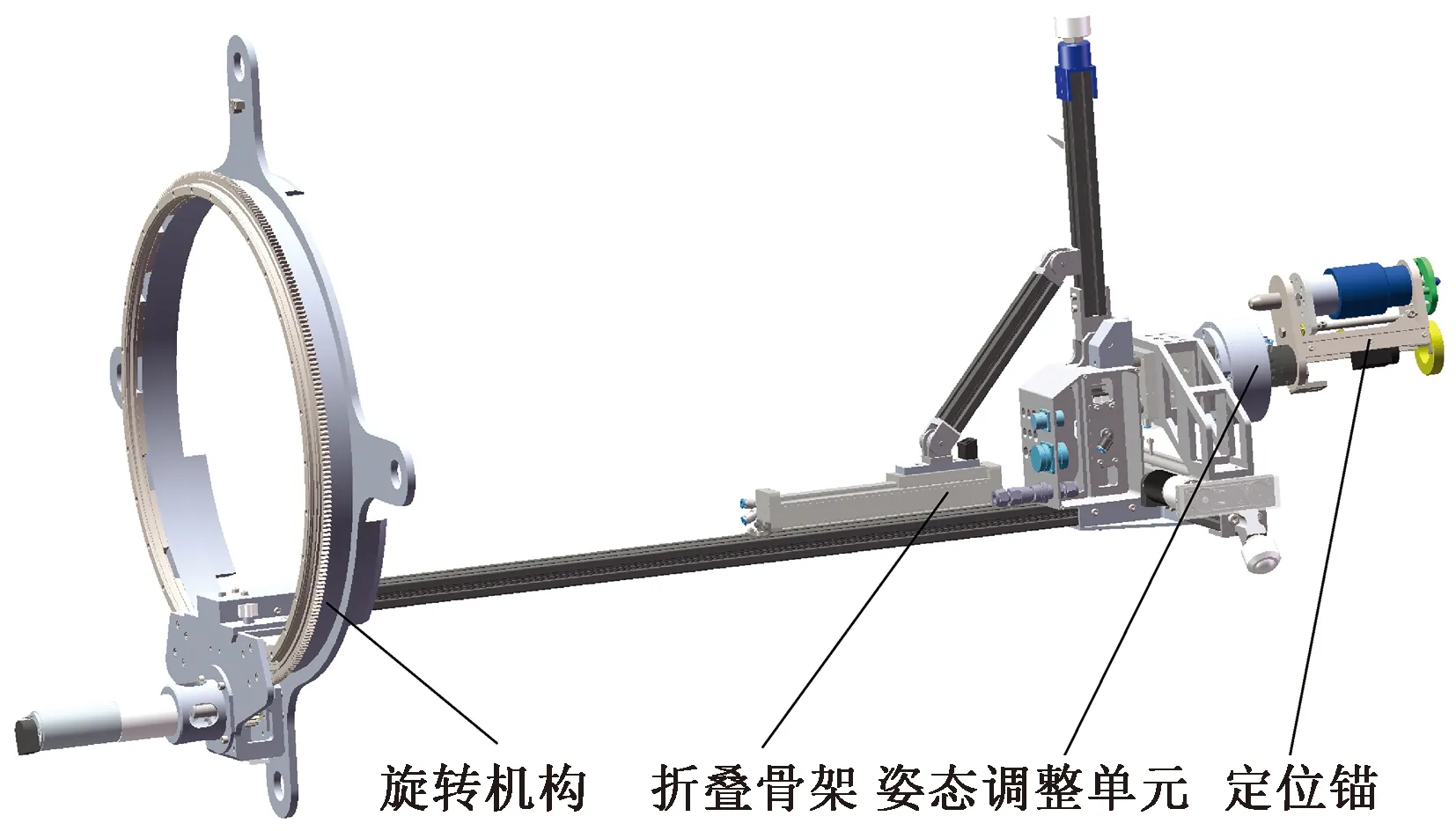
图3 管板定位机器人
(1)定位锚:包含由环形光源与工业相机组成的机器视觉辅助定位系统和用于将定位锚涨紧在管板上的双级气缸。一级气缸为单作用气缸,通过复位弹簧复位,用于将脚爪送入到管孔内部。二级气缸为双作用气缸,活塞缸伸出带动钢珠和保持架向前运动,在钢珠与脚爪楔面的作用下脚爪涨开,在脚爪外表面和管孔内表面之间的摩擦力作用下将定位锚固定于管板上,为其他检修工具提供支撑。
(2)姿态调整单元:主要由伸缩气缸、减速器和驱动电机组成。姿态调整单元用于运动调整定位姿态,辅助定位过程中补偿角度偏差以及实现定位锚的轴向运动。
(3)折叠骨架:主要由铝型材骨架、单轴驱动器、无杆气缸、折叠支腿、接口箱组成。接口箱集成了管板定位机器人本体的电路和气路,使布线更加简洁。单轴驱动器实现定位锚的径向移动。无杆气缸为折叠支腿提供动力,控制折叠支腿的撑开和收拢。折叠支腿收拢时管板定位机器人能够通过管箱过渡缩颈,撑开时能够保证三个脚轮与管箱内壁有效接触。
(4)旋转机构:主要由安装底座、圆弧导轨、一级减速器、二级减速器、驱动电机组成。安装底座通过螺栓固定于管嘴处,驱动电机驱动管板定位机器人做周向转动。
1.2.2 系统动态特性分析
为保证检修过程中被检对象的绝对安全,防止磕碰造成蒸汽发生器设备损坏,管板定位机器人运动速度、加速度较低,所以管板定位机器人在任意位置时刻近似简化为静态力学问题。根据管板定位机器人的运动特征,使用ANSYS有限元分析软件对管板定位机器人整体进行仿真计算,检查机器人在自重和定位锚的作用下,所有极限载荷状态下应力和变形是否满足设计强度要求和定位锚部分的定位精度要求。分析流程如图4所示。
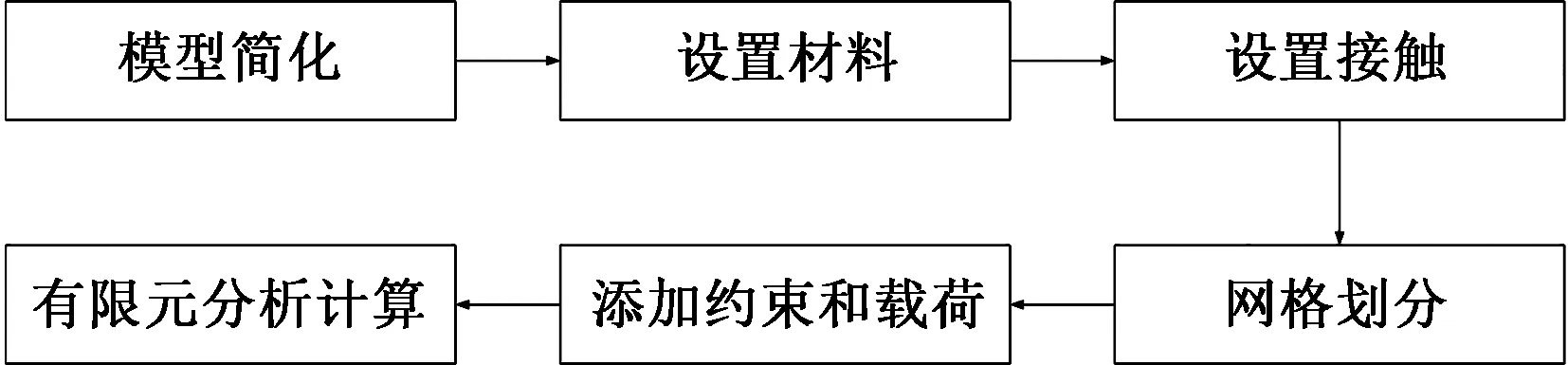
图4 有限元分析流程
在仿真之前首先进行模型简化,根据所分析问题的侧重点,考虑零件在装配体的重要程度、几何特征与所分析问题的相关程度、几何特征及平均网格尺寸的对比等因素,在不改变原有结构特征的基础上,去除掉影响计算效率的倒角、圆角及细小结构,非关键部件(如电机和减速器)等效简化为质量等值的简化模型,机器人搭载的堵管工具简化为质量22 kg的圆筒,图5为简化后的模型及边界加载示意。
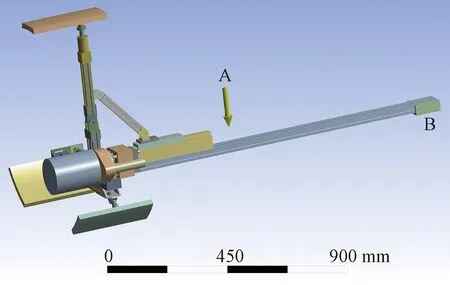
A为重力载荷(重力加载方向为不同旋转角度);B处为固定端,定义为固定约束
管板定位机器人材料属性定义为结构钢和铝合金,其中铝合金材料为6061-T651。
管板定位机器人中各个部分的连接采用螺栓连接,在仿真中将连接处设置为固定接触;脚轮与管箱内壁定义为摩擦接触,摩擦系数为0.01。
网格定义使用自动网格类型,网格基本尺寸为10 mm,划分后网格节点总数为546 527,单元数为110 510。
管板定位机器人在承受22 kg载荷情况下,在0°、45°、90°、135°和180°的旋转角度下所产生的应力、应变和变形值如表1所示。其承受最大应力为35.244 MPa,最大应变0.000 52,最大变形2.212 mm。几种特殊旋转角度所产生的最大应力为35.244 MPa<[σ]=152 MPa([σ]为6061-T651铝合金许用应力),设计满足安全条件,最大变形2.212 mm,机器人刚度满足设计要求。
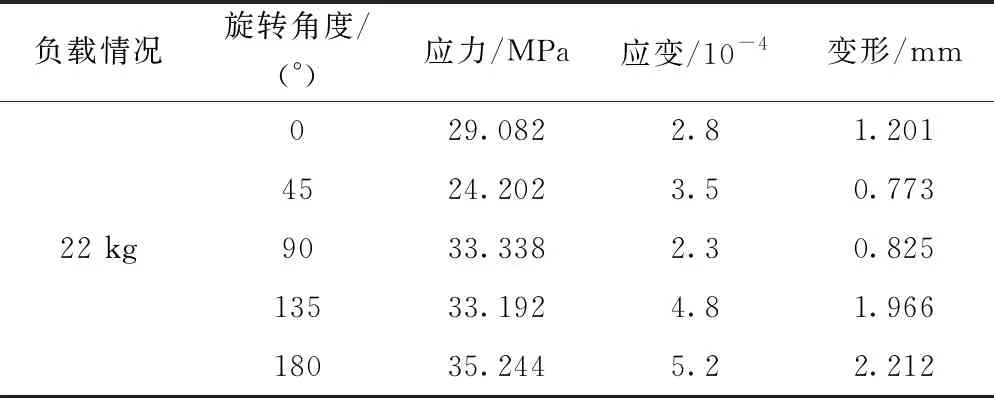
表1 仿真结果
从上述仿真分析结果的数据曲线(图6)可以看出,管板定位机器人在圆周运动过程中,应力、应变、变形的变化都是非线性的,在设计过程中,考虑机器人轻量化需求,在一定程度上使得机器人结构变形大,同时,蒸汽发生器本身的加工装配误差,工作过程中的热应力引起的管板变形等因素的累积误差,会导致管板定位机器人综合定位精度不足以满足定位锚的定位要求。

图6 管板定位机器人应力、形变曲线
要使管板定位机器人准确地将工具对准管板孔,需要控制系统具备实时消除位置误差的闭环反馈控制功能,以弥补机器人非线性变形的影响。本文引入机器视觉技术,对管板定位机器人进行辅助定位,补偿机器人在不同位姿下变形和其他因素所产生的定位误差。
2 控制系统
管板定位机器人的控制系统(图7)由上位机和下位机组成,上位机和监视器用于人机交互,实现实时监控、显示状态以及发送控制指令的功能。选用运动控制卡作为下位机,上、下位机之间通过以太网通信。下位机在接收到上位机的控制指令后,控制管板定位机器人完成指定动作,同时实时反馈运动状态信息至上位机。

图7 控制系统示意图
(1)电气控制:运动控制卡接收到上位机的控制指令后发送运动控制信号,驱动器接收到运动控制命令后,根据信号将标准直流电源转化为电机驱动电源,从而实现管板定位机器人的运动,同时控制卡伺服控制通用接口实时接收正负限位、原点开关以及编码器信号,用于判断电机的运动状态以及到位状态。
(2)气动控制:运动控制卡接收到上位机的控制指令后,使用通用(I/O)口控制电磁阀通断,实现对气动执行元件的控制,同时使用数字量输入接口接收接近传感器信号,判断气动执行元件到位状态。
(3)管板定位机器人使用机器视觉技术辅助定位,构成闭环控制系统,通过机器视觉比较当前位置与目标孔的偏差,反馈至上位机,通过定位补偿算法,控制管板定位机器人完成补偿运动,提高管板定位机器人的定位精度。
3 样机测试
图8所示为管板定位机器人通过机器视觉技术进行辅助定位的实验测试情况,机器人测试在高温气冷堆蒸汽发生器等比例模拟体上进行,测试内容按照实际情况进行,将管板定位机器人安装在模拟体上,通过上位机控制软件操作机器人进行多组运行测试,检验机器视觉辅助定位后,机器人末端定位锚脚爪与指定管板孔的中心误差是否小于2 mm。

图8 管板定位机器人定位补偿测试验证
机器人定位补偿误差原理及结果如图9所示,相机模组通过变径套插入管板孔,由相机获取定位锚脚爪及管板孔图像,导入海康威视图像分析软件,模拟体管板孔直径为13.2 mm,对比两个中心圆圆心距离与管板孔直径可以算出定位补偿误差。在模拟体中进行29次不同孔位运行测试,机器人经视觉补偿后最大误差1.62 mm,平均误差为0.81 mm,小于容许的最大误差2 mm。样机测试结果说明通过视觉定位系统能够有效地提高定位精度。
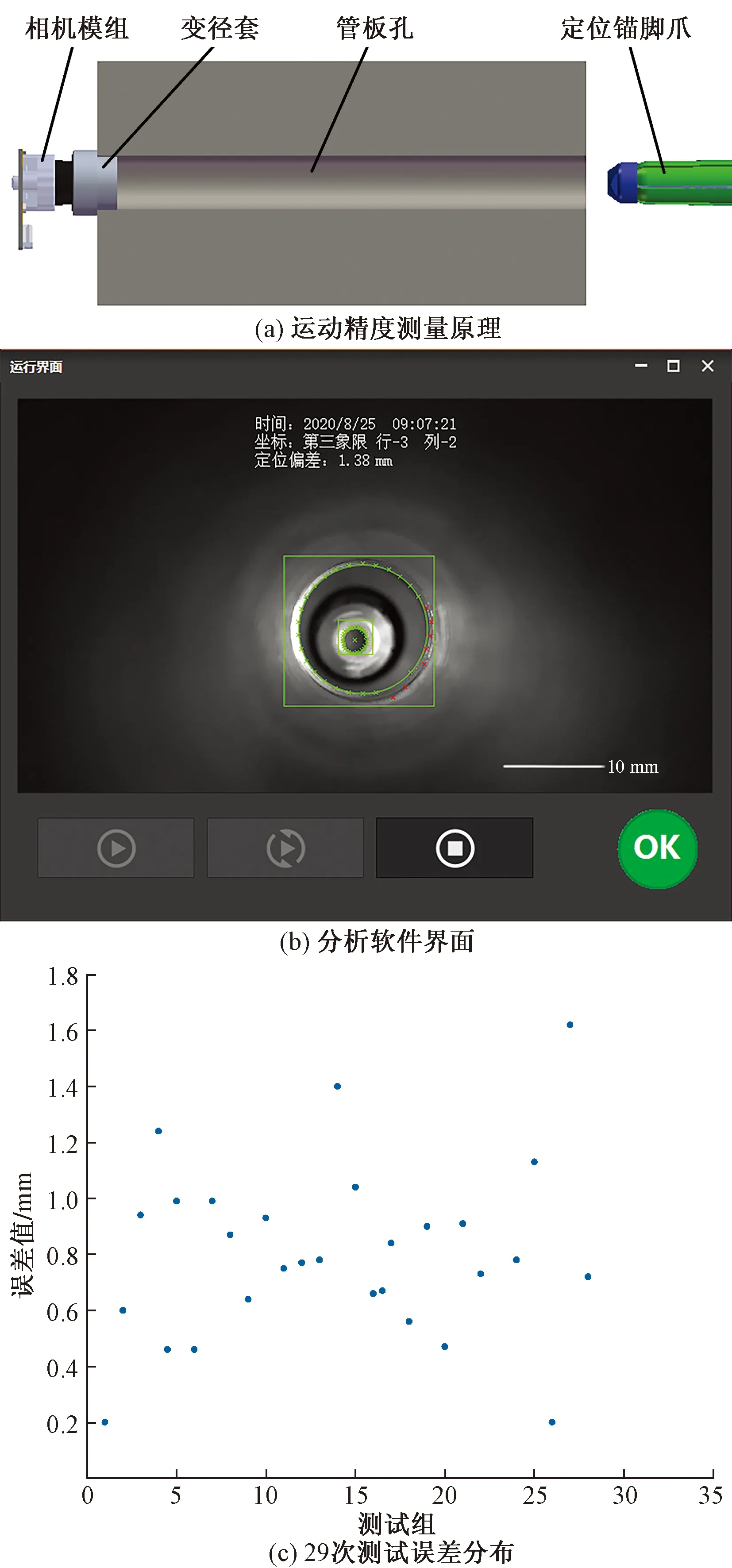
图9 运动精度测量原理及结果
4 结论
管板定位机器人用于对蒸汽发生器二次端管板展开维修工作,降低了人员的工作风险与工作强度。该机器人采用圆柱坐标系的运动形式,将定位任务分解为旋转机构的圆周运动,双轴驱动器的径向运动与摆动,以及伸缩气缸的轴向运动。论文用有限元分析方法对管板定位机器人的运动特性进行了仿真,得出定位锚末端应力、应变、变形在运动过程中是非线性变化的,变形量较大,超出定位精度要求,通过引入机器视觉定位技术,可以很好地消除非线性变形引起的运动误差,准确实现目标位置控制,提高管板定位机器人控制系统的工况适应性。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:06
中国特种设备安全(2021年2期)2021-07-21 08:48:22
装备制造技术(2021年1期)2021-05-21 07:55:14
模具制造(2019年4期)2019-06-24 03:36:42
制造技术与机床(2018年8期)2018-10-09 08:27:34
科技创新导报(2016年9期)2016-05-14 09:12:16
设备管理与维修(2016年5期)2016-03-16 02:20:45
焊接(2016年6期)2016-02-27 13:04:57
中国氯碱(2014年11期)2014-02-28 01:05:07
汽车与新动力(2014年4期)2014-02-27 12:10:39