
基于无线语音通信技术的架空人车监控系统设计
2021-09-08 07:28张海鹏
机械管理开发 2021年7期
张海鹏
(山西阳城阳泰集团竹林山煤业有限公司,山西 阳城 048105)
引言
架空人车作为煤矿井下重要的辅助运输设备,承担着输送旷工的重任,工作可靠性要求较高[1]。架空人车工程具有安装简便、环境适应性强、适合大倾角远距离输送、人员容易上下、成本低廉、能源消耗少等诸多优点,现已在煤炭行业得到了广泛的应用[2-3]。当前运行过程中的架空人车依然存在较多的安全隐患,出现制动失灵、钢丝绳脱落等安全事故,事故发生时的首要反应就是停车[4]。但是架空人车通常是仅在机头设置司机,事故发生时司机不能接收到机头之外的停车信号,只能是事故当事人探出轿厢拉动巷道预设的紧急停车控制线进行停车处理,不能保证架空人车及时停车甚至导致事故扩大[5-6]。为了提高架空人车运行过程的安全性能,以型号为RIKY75的架空人车为研究对象,设计基于无线语音通信技术的架空人车监控系统,实现架空人车司机与乘客之间的信息沟通具有重要的意义。
1 架空人车概况
型号为RIKY75的架空人车应用较为广泛,其结构性能参数如下:电动机型号为YBBP-315S-6,功率为75 kW;减速器型号为B311VHC-71-HX,减速比为71;驱动轮和迂回轮的直径尺寸为1 500 mm;轨道布置为井上108 mm,井下160 mm;钢丝绳的型号为22NAT6×31WS+FC-1670ZZ,其距离轨道的高度尺寸为2 460 mm,钢丝绳间距为1 000 mm;吊椅间隔为14 000 mm,托绳轮间隔为8 000 mm;高速轴制动器型号为BYWZ4B-400/80,制动扭矩为1 460N·m,驱动轮轮边制动器型号为YQP120-C208A,制动力54 kN;架空人车运行时的绳速为1.06 m/s。根据煤矿企业对于架空人车控制设计需求,需要对其设计一套监控系统,能够实现机头司机、轿厢和监控室之间的语音信息沟通。
2 系统总体设计
基于无线语音通信技术的架空人车监控系统总体结构方案如图1 所示,其组成包括监控终端和监控中心,前者设置在煤矿井下架空人车的轿厢内,后者布置于井上的监控室内。监控终端采用型号为S3C2440A的嵌入式处理器、配置语音芯片和TP-LINK 无线网卡,能够完成音频信号的采集与编解码、信号数据的无线传输、乘坐人数检测等功能。监控中心配置普通PC 机1 台,能够连接局域网,完成整个监控系统的协调与控制,包括与井下轿厢的语音通信、乘坐人数查询、轿厢报警处理等功能。
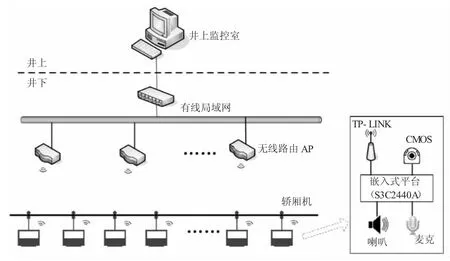
图1 监控系统总体结构
局域网搭建关系如下:井上PC 机与煤矿井下主路由器之间由网线连接,主路由器与巷道内部的无线路由器之间由网线连接,无线路由与轿厢之间为无线连接方式。架空人车在井下巷道内输送长度约为1 000 m,无线路由器信号发射半径范围为室外300 m,室内100 m,以80 m的发射半径计算,整个架空人车线路上需要布置13 个无线路由器即可满足监控系统的要求。
3 监控系统硬件设计
监控系统硬件结构如图2 所示,主要由S3C2440A 处理器模块、电源时钟模块、存储模块、无线网络模块等组成。

图2 硬件总体结构
3.1 S3C2440A 处理器模块
S3C2440A 处理器模块由三星公司开发,采用高性能的ARM920T 内核,在电压为1.3 V 时,工作频率高达533 MHz;支撑Linux、Windows 等多种操作系统;采用独立的16 kB 指令和数据Cache;内部配置较高,设由60 个中断源,24 个外部中断源,130 个复用I/O,可扩展性好;4 通道16 位定时器,具有PWM功能,时钟控制准确。
3.2 电源时钟模块
电源作为监控系统的关键电力来源,是保证系统正常可靠工作的前提条件,关系着监控系统工作的稳定性,还与矿工的安全息息相关。监控终端系统需要置于井下架空人车的轿厢内部,不具备获取生活用电或者工业用电的条件,确定采用7.2 V 2 000 mAh的镍镉电池供电。系统各个模块所需的电压伏值大小包括3.3 V、1.8 V、1.25 V,首先由LM2596 电压调节器将7.2 V 电源调节至5 V,然后经ASM1117电压转换芯片获得3.3 V 和1.8 V的电压电源,1.25 V 电压由MAX8860 供给。S3C2440A 内部集成了PLL 片上时钟发生器,具有USB Hose 和USBDevise的时钟,最大可达到400 MHz的CPU 工作时钟。
3.3 存储模块
S3C2440A 处理器不具备存储功能,需外部配置存储器,要求支持支持大/小端;总线访问宽度范围涉及8/16/32/位;配置8 个大小为128 MB 存储器,其中之一为可编程设置开始地址,支持掉电和自刷新功能。外部存储器包括ROM和RAM两种。ROM在系统掉电时不会丢失数据,RAM可读可写,但在掉电时数据丢失,多用于存储过程数据。ROM选择Flash Memory(闪速存储器),具有很好的数据存储和保存功能,嵌入式Nand Flash 具有很好的单元密度,非线性存储,擦除/写入时间约为4 ms,擦写次数为100 万次。通过S3C2440A 引脚发出的控制指令实现语音等数据的存储。
3.4 无线网络模块
监控系统无线网络选择Wifi 技术,配置无线路由和无线网卡,搭建煤矿井下架空人车的有线/无线局域网,实现音频数据与控制信息的双向传输。设置300 M无线路由为基站,发射范围室外可达300 m,室内可达100 m;无线网卡选择54MUSB,单个无线基站准许接入约100 个用户,各个基站之间采用桥接模式,网络覆盖范围可达几十公里。
4 软件设计
4.1 程序设计
监控系统软件结构如图3 所示,包括硬件层、设备驱动层和应用程序层,软件设计是指驱动层和应用程序层的设计,主要包括声卡驱动、无线网卡驱动、音频采集/播放设计等模块。

图3 监控系统软件结构
4.2 声卡驱动
监控系统声卡驱动采用Wavedev2 模式,通过IOControl 带 入IOCTL_WAV_MESSAGE 与waveapi子系统配合使用控制硬件。Wavedev2 模式来自于微软公司,设计过程中继承了传统的MMD/PDD 分层结构,能够可靠控制相关声音的操控,如喇叭、耳机、麦克、听筒等。与此同时,设置了完备的API 接口函数,可在C++等编译环境下直接使用,API 函数中的参数会传入驱动,以实现语音功能。
4.3 无线网卡驱动
系统选择型号为TP-LINKWN321G的无线网卡,可直接插接USB 口实现音频数据帧和控制信息的传输,其遵循了802.11g 协议,运行过程中数据传输速率接近55 Mbps,具有很好的穿墙性能,室内应用覆盖范围可达100 m。无线网卡由设计人员向运营商直接索要,采用的是USBwifi.dll 驱动,直接加载至WINCE 系统中使用。
4.4 音频采集/播放设计
音频数据的采集和播放程序编制时采用了RecordO 和DisplayO 函数,监控系统运行时音频循环采集与播放功能由DMA 实现,减少CPU 处理时间,音频的编码和解码由CPU 实现,提高处理效率,将解码和编码分开执行。系统涉及两种语音通信,第一是煤矿井上井下矿工之间的沟通通信,对于语音效果要求较低,选取8 kHz 采样频率;第二是煤矿井上井下之间的广播通信,架空人车轿厢仅需播放功能,设计全双工音频通信功能,具体控制流程如图4所示。

图4 语音通信流程
4.5 人机交互界面
人机交互界面实现用户与监控系统的对话,界面的设计采用Visual C++软件中的MFC 应用程序。开启监控系统的第一步是用户登录,包括用户名和密码,允许本地和远程通过用户名密码进行访问。登录完成之后即可进入监控系统的主控界面,可以实现监控中心与各个轿厢之间的语音通信。监控系统语音通信模块具备以下3 个功能:第一是对指定的轿厢进行语音通信,确保井下矿工出现为难时可及时与监控中心求助;第二是对所有轿厢进行广播,确保监控中心人员可以及时传达相关指令或者通知;第三是对所有轿厢进行语音播报,包括轻音乐、安全知识等,确实做到轿厢与监控中心之间的实时信息沟通。
5 应用效果评价
为了验证架空人车监控系统的设计效果,将其应用于型号为RIKY75的架空人车中进行测试,进行了为期半年的跟踪记录。应用结果表明,监控系统运行稳定可靠,能够实现监控中心与各个轿厢之间的实时语音通信功能。相关专业人士统计得出,相较于普通控制系统,基于无线语音通信技术的架空人车监控系统的应用提高了智能化和安全程度,故障应急反应时间降低近60%,降低了架空人车故障停机时间约10%,预计为企业新增经济效益100 万元/年,取得了很好的应用效果。
猜你喜欢
海峡姐妹(2020年8期)2020-08-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
中国特种设备安全(2019年4期)2019-05-20
中国特种设备安全(2019年2期)2019-04-22
网络安全和信息化(2019年1期)2019-02-15
中国质量监管(2016年10期)2016-07-10
现代工业经济和信息化(2016年7期)2016-05-17
电脑爱好者(2015年15期)2015-09-10
电脑与电信(2014年9期)2014-03-13
