
悬臂式掘进机可视化辅助截割系统的设计与验证
2021-09-08 07:28张凤霞
机械管理开发 2021年7期
张凤霞
(山西中招招标代理有限公司,山西 太原 030053)
引言
我国目前部分煤矿的掘进工作还是以人工作业为主,掘进效率难以得到提高。在掘进机作业时会产生较大浓度的粉尘,导致工作环境光线昏暗,司机的视野因为受到限制难以对截割头的具体位置作出精准判断,极易造成欠挖、超挖等施工问题,无法保证成型巷道的作业质量。而一种悬臂式掘进机可视化辅助截割系统,可引导操作人员进行可视化作业。该系统的设计采用了视觉非接触测量应用技术,使截割头的定位难题得以解决,同时采用了捷联式惯导系统帮助传感器精准定位、对机身的位姿进行准确感知。
1 辅助可视化截割应用系统总体设计方案
悬臂式掘进机可视化辅助截割系统总体设计方案,具体可分为工作面的建模,规划轨迹模块、采集数据信息及处理应用模块、解算数据模块、传感器及显示图像模块和存储模块的设置。
1)掘进机的建模与规划轨迹模块用于搭建掘进施工的数学运算模型,把巷道的断面种类、走向、尺寸、截割技术等列入模型参数,再通过输入显示器操作界面的掘进机相关参数,即可完成掘进机截割需要规划的轨迹,自动生成截割作业路径,创建起截割头的补偿截割数学运算模型,结合截割头的尺寸、机身的位姿、截割点的有效变化、巷道的边界限制、截割运行轨迹补偿等,完成截割头移动的真实轨迹的规划,避免巷道产生超挖或欠挖[1]。
2)传感器的构成主要分为超声波及激光测量距离传感器、捷联式惯导和测量视觉的相关系统,其中测量视觉系统的主要构成是红外16 点LED型标靶与除尘防爆相机,相机被安装在掘进机上,LED 红外标靶被安装在回转台附近。通过前期研究显示,LED红外多点标靶能够避免因为灰尘多而造成视觉测量偏差,一般规定要将测量视觉的准确度误差控制在±0.8°上下(垂直式摆角)和±0.5°上下(水平式摆角)[2]。
3)采集信息的处理应用模块主要用于完成超声波、捷联式惯导等应用传感器的数据信息的实时采集,并将采集回来的数据信息通过预处理,获取传感器的输出量,再将输出量传输至解算数据模块。
4)解算数据应用模块的主要构成分为机身解算定位、截割头解算定位及其解算轨迹。
5)显示图像应用模块主要完成设置参数、显示轨迹、提示控制量、查询数据内容等。
6)存储应用模块功能的实现依靠控制器的集成数据单元,与数据库MySQL 相结合实现对巷道、机身、截割头等相关数据的存储。煤矿悬臂式巷道掘进机辅助可视化截割控制系统依靠捷联式惯导对巷道内的掘进机进行定位,再通过捷联式惯导、超声波与激光组合传感器对掘进机的位姿进行确定[3]。本模块根据红外图像标靶进行定时图像信息采集,再通过对图像信息的预处理获取截割头姿态角,然后将其转化至断面的坐标系中,最终将其显示在可视化操作界面,为操作者提供准确、直观的导引和帮助。
2 系统相关软件的开发
采用跨平台VS2015+Qt5.8 软件,以保证数据得到实时更新,使用多线编程执行的方式使软件具备多种应用功能。
主线程序负责更新主监测操作界面,其中包括掘进机位姿的实时显示,导引路径、截割头处在断面时的实时位置更新显示,掘进机欠挖或超挖时的报警。该系统辅助1 线程可以通过摄像机完成标靶图像的采集,进行截割臂的姿态测量;辅助2 线程采用通信RS485 模块完成超声传感器的数据采集;辅助3 线程采用通信RS485 模块完成惯导捷联数据的采集;辅助4 线程采用通信RS485 模块完成激光传感器测距数据的采集。各线程之间的信息交互由数据库MySQL 负责完成,以便实现对各种数据信息的传输和管理[4]。
按照悬臂式的掘进机辅助可视化截割应用系统方案,需要该系统界面实现对工况的实时数据信息的采集及计算,并对其结果进行存储与显示,以及完成各项参数设置,实现数据可查询的功能等,如图1所示。

图1 可视界面的功能
该系统采用捷联式惯导、超声波和激光组合传感器对巷道掘进机位姿进行精准定位,通过测量视觉系统获取截割头位于机身的准确位置,然后利用转换坐标对截割头巷道对应位置进行查找,最终在显示器上按相应比例加以显示。
在该系统1 区域通过动态图形化显示的办法对巷道掘进机的位置进行精准显示,其中包括显示掘进机跟前方及其两侧煤壁相差距离、掘进机机身偏航角。在系统2 区域实现模拟巷道的显示,同时对掘进机截割规划路径加以显示,通过动态椭圆图形对截割头的运行轨迹进行显示,完成截割作业辅助性的导引帮助。在系统3 区域展示机身姿态角和机身与两侧煤壁的差距,同时以动态图形化的形式加以显示。在系统4 区域如果发现2 区域出现截割头运行轨迹超越模拟巷道的边界标准,系统会自动启动指示灯进行报警,直至截割头修正轨迹并符合边界标准为止。在系统5 区域通过经纬度的对比对掘进机所处位置进行实时显示[5]。
3 测试验证
3.1 截割头的定位功能测试
相机距离LED 红外标靶170 cm,采取内参定相机的办法获取到相机的内参数,其中主像素点为(617.68,512.234),焦距是5.116 mm。本论文通过试验来验证截割头处于动态与静态测量视觉的效果。
1)关于对截割头进行的视觉静止测试。当截割头处于静止时,在每隔100 ms 就进行一张图片采集,图2 是将图片完成处理后的结果展示。
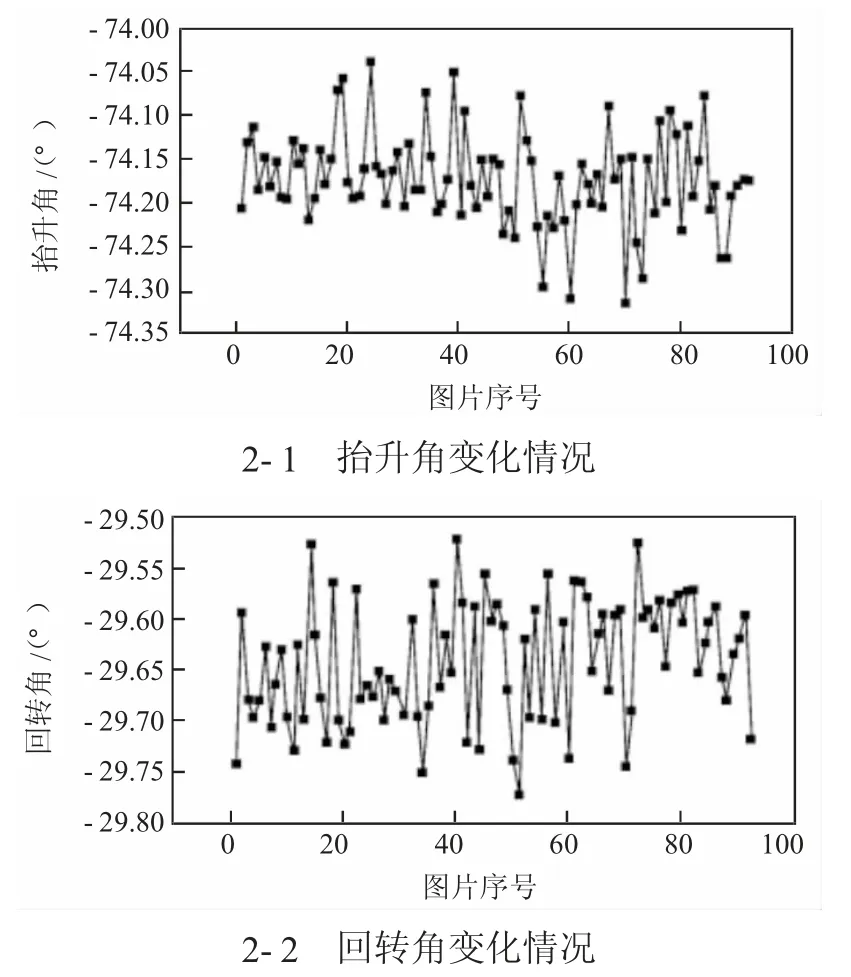
图2 静止截割头视觉的测试变化结果
通过图2 可以看到,当截割头处于静止时,抬升角在测量视觉时的跳动不会超过0.3°,回转角的跳动不会超过0.25°,符合辅助可视化截割应用系统的设计标准和要求。
2)关于对截割头视觉运动的测试。要检测辅助可视化截割应用系统的可靠性,主要通过对运动状态下截割头视觉方面的性能情况测试加以确定。在截割头处于静止状态时,每隔100 ms 进行一次图片采集,首先需将截割头保持垂直的方向静止不动,再操作其截割头从右至左匀速摆动[6]。测试中回转角的摆动角度曲线变化平滑,并呈线性运动。对其摆角进行动态测试时,同样采用每间隔100 ms 进行一张图片采集,此时保持截割头的回转角不变,再通过截割头由上至下的方式运动来进行图像采集,要求截割头与抬升角所摆动的角度保持一致,变化曲线平滑,呈线性运动关系,具有较好的稳定性。
3.2 掘进机机身姿态性能试验
1)九轴的捷联式惯导相关静置测试。为了达到降低对捷联式惯导的影响作用,在其防爆壳内用厚度为5 mm的硅胶垫将捷联式惯导固定好,然后启动捷联式惯导,静置1 min 以后,开始进行姿态角信息数据的采集,时间为10 min,其中俯仰角和横滚角的变化都不超过0.4°,航向角所发生的变化不超过0.2°。通过以上测试可以看到,九轴的捷联式惯导各项性能可靠、稳定,符合系统相关的标准和要求[7]。
2)捷联式惯导相关动态测试。在高精度自由旋转台上固定九轴的捷联式惯导,需待方位台正转至2°、捷联式惯导停稳再进行数据采集,需要进行21个组次的连续性采集。测试结果显示,航向角所发生的变化能够符合辅助可视化截割机运行工作的精准度要求。
4 结论
1)在截割头处于静止状态下,该系统设计抬升角只限于在不超过0.3°的范围跳动,而回转角在不超过0.25°的范围跳动;当截割头运行时,截割头的摆动趋势与测量结果相符,其运动曲线呈线性关系,具有良好的稳定性能。
2)当掘进机的机身保持不动时,其俯仰角与横滚角都不超过0.4°,而航向角则在不超过0.2°的范围变化。在动态测试中,其航向角的曲线变化与旋转台方位角的曲线变化表现为斜率一致。
3)通过对该系统的测试结果可见,该系统的截割运行轨迹和报警提示功能稳定可靠,符合相关标准及要求。
猜你喜欢
测控技术(2018年2期)2018-12-09
测控技术(2018年8期)2018-11-25
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
凿岩机械气动工具(2015年3期)2015-11-11
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12
