
矿井掘进机控制平台设计及应用研究
2021-09-08 07:28李鹏宇
机械管理开发 2021年7期
李鹏宇
(山西大同永定庄煤业公司,山西 大同 037024)
引言
掘进机作为快速高效的大型机械设备,在作业时应对其实施精准控制,才能确保掘进机在合适的地点做出正确的作业动作[1]。在现代化、智能化发展的背景下,掘进机的自动化水平还有待进一步提高,尤其是控制平台的自动化水平在实际工程作业中存在一定的缺陷,导致在掘进速度和决定质量方面存在问题。因为掘进机的控制平台通常是由通用型PLC 进行核心控制,在选用PLC型号时未充分考虑矿井的特殊应用环境。掘进机会根据后期使用情况,不断地拓展模块功能,在普通的PLC 模块中开展后期拓展将带来较高的成本,不利于控制平台的经济性。在综采工作面机械设备智能化技术发展的背景下,应提升掘进机控制平台的智能化程度,实现一体化集中式平台发展[2]。以嵌入式系统研究作为切入点,实现掘进机控制平台的低成本、跨平台性的关键特性。以软PLC的标准化、模块化设计思路,结合Linux 开放式的操作系统,可实现掘进机控制平台的拓展功能高度集成。在自动化智能化方面相比于原有控制平台将有较大的提升,研究成果为掘进企业智能化发展研究提供了借鉴思路。
1 控制平台总体方案
1.1 控制系统分解
以煤矿企业常用的四回路掘进机作为研究对象,在其原有整体系统架构的基础上提出可拓展性概念。通过嵌入式PLC 控制核心部件,实现整体结构的分层设计,不仅针对于底层硬件、软件,也将实现通信驱动的全方位重新设计。
四回路掘进机主要通过馈电开关、隔爆本质安全型电气箱、隔爆电磁阀、声光报警系统、隔爆紧急按钮等零部件组成[3]。通过传感器将各类部件形成统一的控制系统,并实现远程无线遥控。控制系统驱动液压系统,使得掘进机能够按照命令指示开展相应的作业动作。在掘进机控制平台中,电气控制箱是最为关键的部分。四回路悬臂式掘进机作为研究对象,其机体分解示意图如图1 所示。
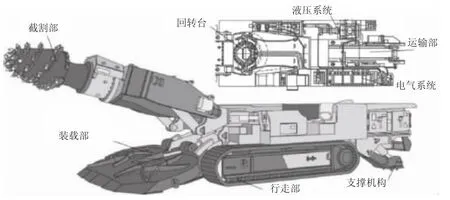
图1 悬臂式掘进机机体组成示意图
1.2 控制回路分析
掘进机整体的电气系统主要由回路、电源、控制箱、控制平台和遥控装置组成。各个部件之间通过电缆接线,结合各类隔离开关核电流变送器实现掘进机电机的运转。为确保本质安全,当隔离开关合闸时,才能使得控制平台的控制箱产生电流、电压信号。通常电压信号为4~20 mA 信号,由控制平台的AI 接口接收[4]。控制平台作为控制系统的核心部分,在信号控制、搜集、决策通讯等方面有一体化功能,能够对外界环境有较强的适应性,并且安全可靠。四回路掘进机控制系统如下页图2 所示。

图2 控制系统示意图
1.3 整体架构设计
根据目前掘进机控制系统的缺陷,采用嵌入式软PLC 系统控制元件。采用的软件代码是基于Linux系统下的c 语言编程,实现了硬件驱动软件,对各个硬件设备相互连接。软PLC的上层软件开发将提供I/O 接口以及驱动维护程序[5]。此时,软PLC 控制器将实现整个掘进机电气系统的控制。
在完成上层软硬件设计后,将配合智能传感器、继电器等信号输入接收模块,在信号数据输入后,将在PLC 中心形成决策信号。控制平台的信号输出将对电磁阀、操作箱等变送器实现操作,并将数据显示到工具显示屏以实现人机交互。四回路掘进机控制系统的架构设计示意图,如图3 所示。
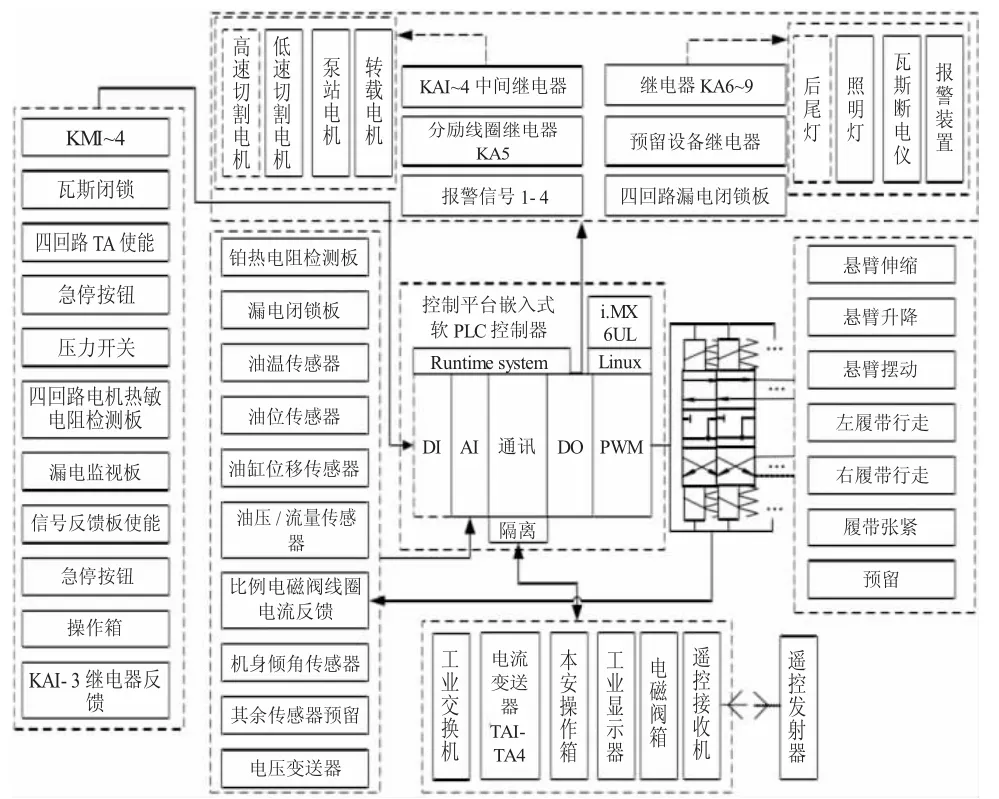
图3 控制系统整体架构示意图
2 控制平台硬件设计
掘进机硬件系统基于Cortex A7 架构的处理器进行开发,同时配备DDR3 内存、安全芯片等关键核心零部件。数字量与模拟量的采集需要PWM 进行驱动,同时各个硬件的选型应具备隔爆属性。在此基础上,控制平台的硬件应满足国家安全标准,例如GB3836 系列标准。
信号采集电路应使用光电隔离器进行隔离,数据量接口应满足主要信息开关量的存储空间。尤其针对于模拟量信息的采集应使用MCP3208的A/D转换芯片,因为该芯片的通讯接口的可兼容性更强同时可利用光有隔离器不间断地实现接口限压保护[6]。
完成采集电路设计后,将对总线电路进行设计。总线电路要求配备8 个平行通讯串行接口,采用隔离CAN 模块实现总线的差分电平,使得总线电路具有隔离功能。隔离CAN 总线电路如图4 所示。
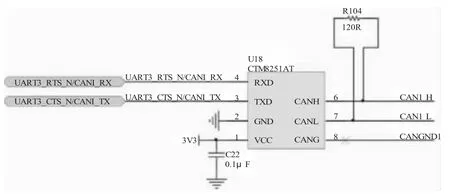
图4 隔离CAN 总线电路示意图
为了控制平台具有放大和校正功能,在对信号处理时应采用常规的PWM 驱动方式,实现功率和电流的放大。PWM驱动同样要求采取电气隔离,并且配合换向阀避免颤振电路的引入。由于电路使用的是精密采样电阻,需要及时地获取电路反馈回的控制器信号。在掘进机驱动机平台上以串联的方式在线圈回路上实现A/D 转换,使得软PLC的控制平台能够精准地判断和分析。PWM驱动电路如图5 所示。

图5 PWM 驱动电路示意图
3 控制平台软件系统设计
由于Linux 系统具有可移之性和良好的拓展性,将其作为控制平台的下层软件系统。以C/C++工具作为开发软件,实现嵌入式的开发环境,如图6 所示。

图6 嵌入式Linux 开发环境示意图
由于新设计的系统采用的是软逻辑思维,后台控制器为硬件平台。当前端软件要实现功能时,需对软件进行封装。基于嵌入式的控制器将实现在软PLC的硬件环境下,对掘进机控制平台的驱动控制,如下页图7 所示。
由下页图8 和下页图9 可知,在控制平台PWM驱动下,控制平台的比例多路换向阀的电控比例特性曲线正常,其中比例电磁铁电流-力特性曲线占空比小于20%时,流量和阀芯行程均为零,比例多路换向阀没有输出,当继续增大占空比时,流量和阀芯行程随占空比变化的线性度较好,回程时存在滞回现象,与自带的PWM驱动接口驱动得到的曲线形态相同,控制平台实现了其PWM 驱动电磁比例多路换向阀的功能。

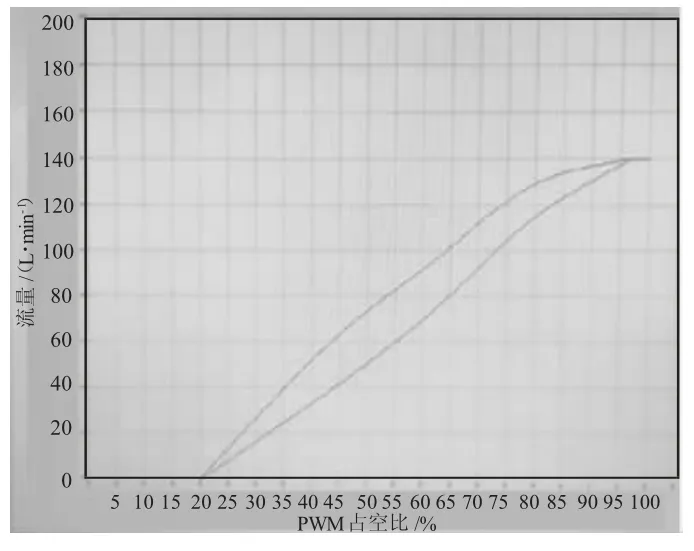
图8 流量随PWM 占空比变化曲线

图9 阀芯行程随PWM 占空比变化曲线
控制平台接收到输入信号后,到输出控制信号所需的时间为响应时间,后台工控机自动为每个任务配置一个任务监视器,在任务处在在线模式后,任务监视器可以对任务的执行相关参数进行监控。为测试控制核心控制精度和响应速度,对控制平台控制比例多路换向阀的控制任务进行监视,在执行的驱动比例阀任务的最大执行时间为198μs,响应时间符合掘进机工作环境要求。
4 结语
目前,矿井掘进机的控制平台在自动化和智能化方面还有提升空间。根据现有掘进机控制系统的控制平台,结合实际工况设计出以软PLC 驱动的控制平台系统。在后期实验中,证明了控制平台的电流反馈控制在安全范围内,相比于原有的响应时间有较大的提高。研究成果为掘进机装备的自动化水平提升奠定的基础。
猜你喜欢
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
测控技术(2018年8期)2018-11-25
电子制作(2016年19期)2016-08-24
工业炉(2016年6期)2016-04-10
中国共青团(2015年7期)2015-12-17
凿岩机械气动工具(2015年3期)2015-11-11
液压与气动(2015年6期)2015-04-16
凿岩机械气动工具(2014年3期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01
