
掘进机推进系统不同电液控制方式的研究
2021-09-08 07:28于志强
机械管理开发 2021年7期
于志强
(晋能控股煤业集团四台矿,山西 大同 037003)
引言
在全断面掘进机进行巷道掘进的过程中,由于井下环境的复杂性,使得掘进机在作业过程中的掘进速度需依据不同的工况得到及时调整,满足安全高效的作业。对于掘进机的掘进速度,主要是通过推进系统进行调节的[1],对于推进系统的系统,目前主要采用的方式为采用液压系统实现自动化控制,这是由于液压系统相对于电机驱动,不需要高压电源的供电,容易实现同步控制。采用液压系统进行掘进速度控制的精确性,常用的主要有普通的PID 控制方式,为目前使用较多的控制方式,而随着控制技术的发展,模糊PID 控制的出现,给液压系统的控制提供了新的方式,对于这两种控制方式的优劣,采用AMESim 进行液压系统的建模,并进行两种不同控制方式的仿真分析。
1 掘进机推进系统及其控制方式
1.1 掘进机液压推进系统
掘进机的系统组成示意图如图1 所示,推进系统采用液压系统提供动力,以推进油缸作为执行元件,推动主轴及刀盘克服阻力进行掘进。在进行推进的过程中,通过前支撑的上下支撑部分来调整机身,前后支撑靴在油缸的调节下进行固定。在掘进机进行掘进时,前后支撑靴起固定机身的作用,通过推进系统的液压系统来控制推进油缸,实现掘进机的推进,在推进油缸的作用下,刀盘进行岩层的切割,并将碎石进行输出[2],完成切割过程。推进系统的液压系统主要由油箱、液压泵、推进油缸、比例阀及相应的传感器组成。液压泵采用斜盘结构轴向柱塞变量泵,通过恒功率阀及相应的连接结构,保证液压泵的恒功率输出。
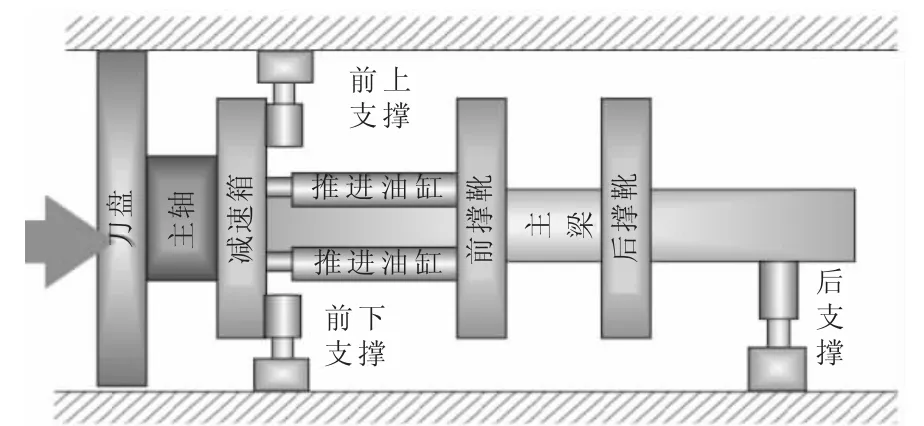
图1 掘进机系统示意
对于掘进机推进系统的液压系统,采用AMESim 软件进行液压系统的建模。AMESim 软件是液压、机械、控制等多学科系统的综合建模应用仿真平台,可以实现系统的交叉控制仿真,避免模型的相互传输及平台的切换使用,提高仿真分析的灵活性。采用AMESim 进行系统的仿真分析,分为四个主要步骤,包括草图绘制、选型、赋值及仿真分析。依据掘进机推进系统的液压原理及组成,采用AMEsim 建立液压系统的模型如图2 所示。
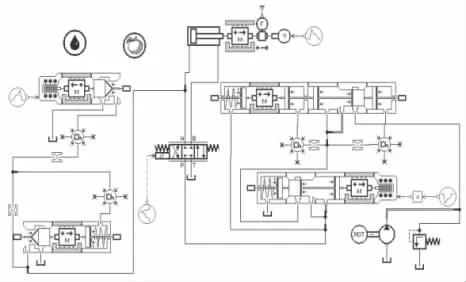
图2 推进系统液压模型
1.2 液压推进系统的控制方式
随着工业技术的不断进步,对于工业控制的精度要求越来越高。在工业控制领域,面临着多样的环境变换及参数的不可控,为了解决这一问题,PID 控制方式成为了较多的选择。PID 控制方式经过较长时间的使用及验证,具有良好的控制效果,并且技术发展较为成熟,在工业自动化控制领域具有广泛的应用。PID 控制效果突出,可以对变量进行实时纠正,并且控制结构也简单,并且控制过程不需要精确的数学模型,能直接对被控制量进行监视及反馈。模糊控制相对于控制理论是较大的提升[3],不依靠数学模型来进行控制器的创建,通过模糊集合采用一定的模糊规则进行推理,来实现控制的精确性。
PID 控制通过系统的比例、微分、积分系数进行调节,而模糊PID 控制则相对于PID 控制增加了模糊控制器进行调节,通过合适的转换开关量[4],来进行系统的调节控制。模糊PID 控制相对于PID 控制出现的时间不长,在掘进机推进系统中的应用尚不广泛,对于其控制性能,需要进行进一步的验证。
2 基于AMESim掘进机推进系统的仿真分析
根据使用的掘进机液压系统参数对于建立的液压系统模型进行元件的赋值,采用MATLAB 进行模糊算法的编写,将MATLAB 作为AMEsim数据处理的工具[5],进行液压系统的仿真分析。依据系统使用实际操作的PID参数,设定变化的负载推力如图3 所示。
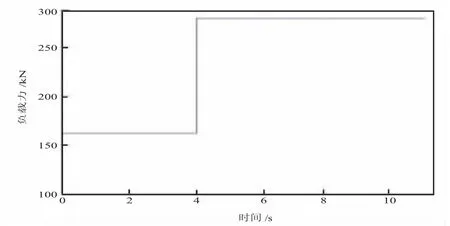
图3 负载推力变化曲线
依据图3 中的负载曲线分别对推进液压系统进行PID 控制和模糊PID 控制,依据模型进行仿真分析,在运行过程中,设定同样的干扰信号,对于系统的响应仿真分析得到如图4 所示的结果曲线。从图4 可以看出,两种不同形式的控制方式在负载干扰的情况下,模糊PID 控制方式的调节效果要明显的好于普通的PID 控制方式,具有较高的响应速度,产生较小的波动,并且在稳定性、超调量上都要比普通的PID 控制方式效果要好,这说明了模糊PID 控制对于掘进机液压推进系统具有较好的实用性,可以提高系统的性能。
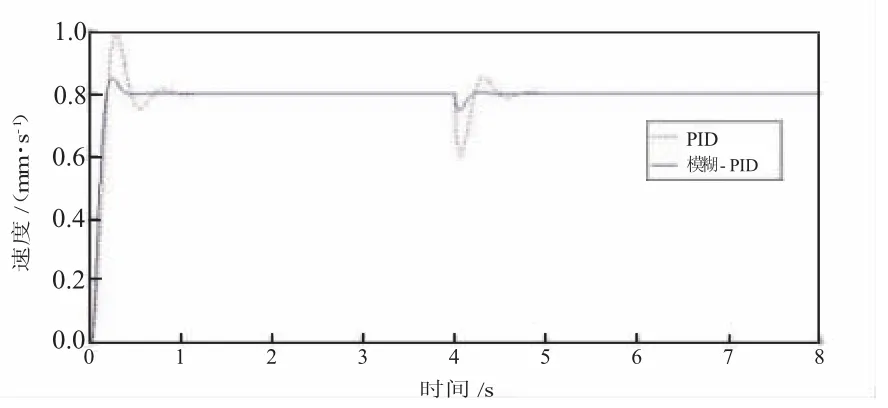
图4 液压推进系统响应曲线图
3 结论
1)模糊PID 控制方式的调节效果要明显地好于普通的PID 控制方式,在掘进机的液压推进系统中具有较高的响应速度,产生较小的波动,可以提高掘进机液压推进系统的稳定性,并且在超调量上要小于普通的PID控制方式,有利于减小元件在使用过程中的冲击性,提高元件的使用寿命,提高系统的效率。
2)采用模糊PID 控制对于掘进机液压推进系统具有较好的实用性,可以提高系统的性能,结合全断面掘进机的高效率掘进,可以实现煤矿的高效开采,满足煤炭的大量需求。
猜你喜欢
低温与特气(2022年2期)2022-11-26
冶金设备(2020年2期)2020-12-28
纤维复合材料(2018年2期)2018-12-07
测控技术(2018年8期)2018-11-25
通信电源技术(2018年5期)2018-08-23
凿岩机械气动工具(2015年3期)2015-11-11
中国修船(2014年5期)2014-12-18
汽车零部件(2014年5期)2014-11-11
凿岩机械气动工具(2014年3期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01
