五相永磁同步电机三次谐波电流控制比较研究
2021-09-07 02:02:48李添幸马瑞卿白浩樊平张煜辰
西北工业大学学报 2021年4期
李添幸, 马瑞卿, 白浩, 樊平, 张煜辰
(西北工业大学 自动化学院, 陕西 西安 710129)
在过去的十几年里,从全电飞机(或多电飞机)概念被提出,到目前已经融入飞机设计的核心理念中,以电机和驱动控制器为核心的电驱动系统在飞机上得到了广泛应用。随着大型飞机电驱动需求的增加,以及机载设备功率等级的大幅度提升,对机载电机提出了高功率密度、高可靠性、高安全性等要求[1-2]。多相电机由多相绕组构成,具有可靠性高、功率密度高、容错能力强等优点[3-5]。
目前用于多相电压源逆变器(voltage source inventer,VSI)的SVPWM技术的主要分为3类:d-qSVPWM、双d-qSVPWM以及多维度SVPWM[6]。根据参与合成参考矢量的基础矢量个数,d-qSVPWM可以分为两矢量合成和n-1相矢量合成(n为多相VSI的相数)。由于多相VSI中电压矢量在多个旋转坐标系均有映射,导致高次谐波的产生。为了解决这一问题,Kelly等提出了n-1相矢量合成,并用于9相VSI[7]。Iabal等将其用于5相VSI,基波参考矢量由相邻2个大矢量+2个中矢量和2个零矢量来合成。通过控制同相位大矢量与中矢量的作用时间比为1.618,使VSI输出的电压波形中不再含有三次谐波[8]。在相同调制比下,采用2个大矢量合成,相电压的均方根值更高[9],然而,其VSI输出电压的波形失真度远高于采用n-1相矢量合成。
通过控制大矢量与中矢量的作用时间比虽然可以实现三次谐波电流抑制,但是无法实现三次谐波电流的控制。当气隙磁链密度函数中三次谐波与基波分量之间的比值γ为1/6时,在相同气隙下,基波含量的幅值最大[10]。由于三次磁动势的存在,可以通过注入三次谐波电流来提高电磁转矩。为了实现三次谐波电流的闭环控制,同相位大矢量与中矢量的作用时间之比不再是定值,而是根据基波与三次谐波参考矢量推算出每个基础矢量的作用时间[11-12]。文献[13-14]提出了一种相邻4个大矢量和2个零矢量的合成方式用于5相VSI。在任何调制系数下,4个大矢量的磁链谐波失真[13]和电流总谐波失真[14]都高于2个大矢量+2个中矢量,而且相比于2个大矢量+2个中矢量,4个大矢量实现难度更高。Chen等针对2个大矢量+2个中矢量中开关顺序展开了研究,将每个扇区分为3个区域,在不同区域对应不同开关顺序,降低了相电流的总谐波失真[15]。然而,采用这种方式会增大共模电压,共模电压在电机长期运行的过程中会引起一些不好的问题,比如:轴承故障、设备老化以及电磁干扰等[16-18]。降低共模电压的核心就是减少零矢量的作用时间。文献[19]在2个大矢量+2个中矢量的基础上引入了一对作用效果完全相反的电压矢量来取缔零矢量,将电压脉动从±0.5udc降到了±0.1udc,效果显著,但是增加了逆变器的导通损耗和电机的铜损,降低了母线电压利用率。当同相位大矢量与中矢量作用时间比不固定时,根据d-pSVPWM在获得每个矢量作用时间的过程中,需要对一个四元一次方程进行求解。随着相数的增加,求解难度增加。为了解决这一问题,双d-pSVPWM被提出,基波参考矢量由其所在α-β子空间中对应扇区相邻的2个大矢量与2个中矢量合成,三次谐波参考矢量由其所在x-y子空间中对应扇区相邻的2个大矢量与2个中矢量合成,在2种子空间中同相位的大矢量与中矢量的作用时间比都是1.618[20-21]。由于基波与三次谐波合成过程完全独立,通过对2个二元一次方程求解即可获得每个矢量的作用时间。虽然在获取每个矢量作用时间的过程中,双d-pSVPWM比d-pSVPWM的计算难度更低。然而,这2种算法从参考矢量到每个功率器件的导通时刻,需要经历扇区判断、矢量作用时间计算以及对应导通时刻查询等步骤,需要占据控制单元大量的资源。因此,López等提出一种基于自然坐标系多维度SVPWM,通过选取一组特定的基础矢量用于参考矢量的合成,经过矩阵运算和简单的加减法即可由参考矢量直接获得每个功率器件的导通时刻[22-23]。文献[24]通过改进参与合成参考矢量的基础矢量组,使算法得到了进一步的简化。
为了获得三次谐波电流的参考值,文献[10]提出了一种基于最大电流不变的约束条件来计算基波电流与三次谐波电流的参考值,当三次谐波与基波电流比值χ为1/6时,输出转矩最大。然而,其寻找最大转矩点的方法是基于拉格朗日最优化理论进行的,因此其寻优结果是一个近似值。文献[25]在此基础上对最大转矩点的寻优过程进行了改进,并提出了一种基于铜损不变的约束条件来计算基波与三次谐波电流的给定值。然而,电机的电磁转矩是由电流与磁链共同决定的,因此在寻优过程中应该同时考虑二者中三次谐波与基波分量之比对最大转矩点的影响。
本文对已有的最大电流不变约束条件进行了改进,给出了不同γ取值范围内,基波电流与三次谐波电流参考值的计算方法。首先,根据气隙磁通函数,绕组函数以及磁链的表达式,得到相同气隙在不同γ情况下,气隙磁通密度函数中基波、三次谐波分量的幅值。其次,根据电磁转矩在2种约束条件下随γ与χ的变化趋势,得到2种约束条件下基波与三次谐波电流参考值计算方法。再次,对3种用于三次谐波控制的SVPWM进行了介绍,根据基础电压矢量作用时间的取值范围,得到最大基波电压利用率随Vref3/Vref1增加的变化趋势。最后,通过实验对2种约束条件下分别采用3种SVPWM进行了对比。
1 空间气隙磁通密度与电磁转矩
5相永磁同步电机(permanent magnet synchronous motor,PMSM)的电磁转矩方程为
Te=2.5pn(ψfiq+3ψf3iq3)
(1)
式中:iq为基波q轴电流;iq3为三次谐波q轴电流;ψf为基波谐波磁链系数;ψf3为三次谐波磁链系数;pn为电机极对数。
(1)式中ψf,ψf3由空间气隙磁通密度决定。忽略槽开口,空间气隙磁通密度函数

(2)
式中:θe为转子位置;τ∈{a=0,b=1,c=2,d=3,e=4};Bm为基波幅值;γ为气隙磁通密度函数中三次谐波与基波的幅值比值。

(3)
式中:rs为气隙圆周等效半径;ls为铁心轴常;Nph为每相匝数;kw为基波绕组系数;kw3为三次谐波绕组系数。
假设永磁体产生的磁通密度峰值为Bpeak,不同γ的取值范围,Bpeak所对应的转子位置也会发生改变,二者之间的关系根据γ的取值分为可以分为2种情况
(4)
将(4)式带入(2)式,得到不同γ对应的Bm

(5)
将(3)式、(5)式带入(1)式,其中iq=im,iq3=0

(6)
当γ=1/6时,(6)式取得最大值。
2 基波与三次谐波电流参考值计算
基波电流采用无差拍的控制,三次谐波电流采用PI控制,控制框图如图1所示。
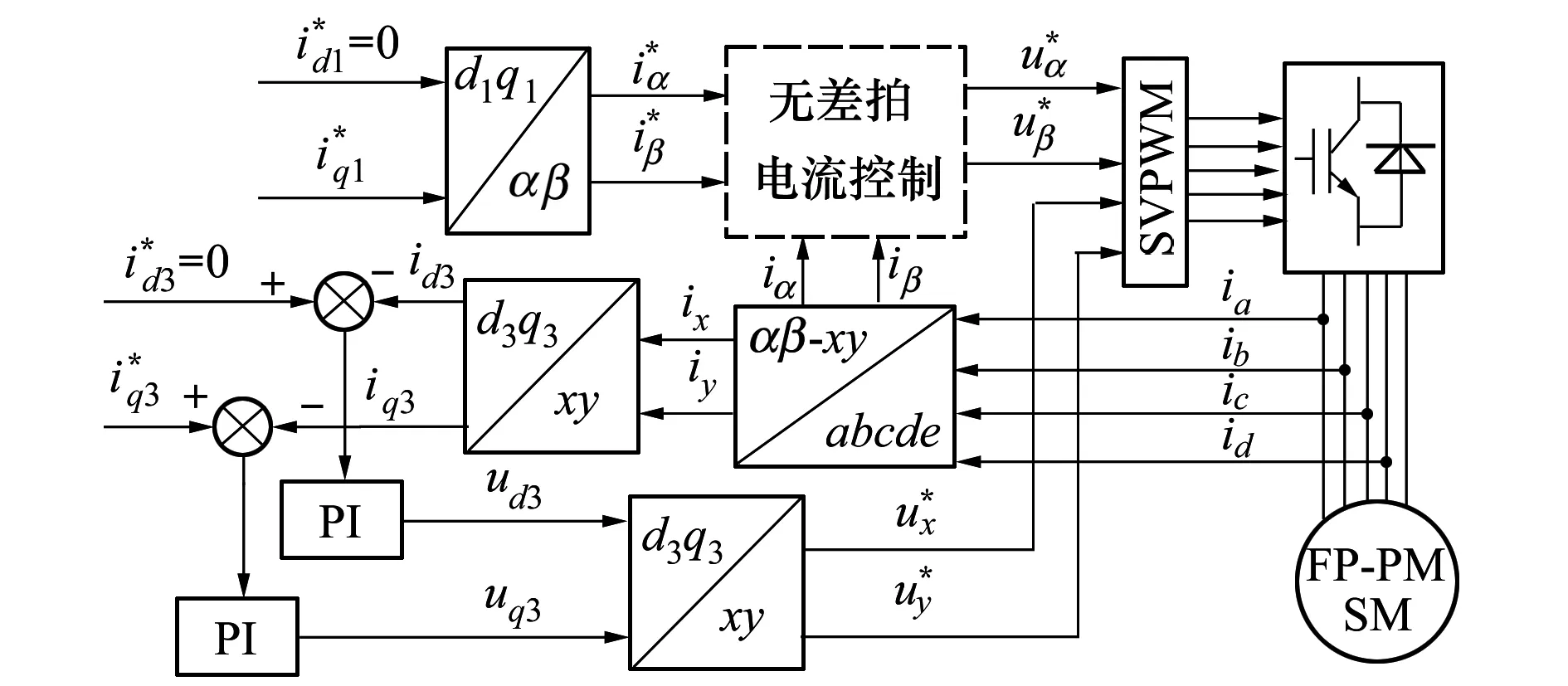
图1 五相PMSM电流环控制框图
2.1 铜损耗不变
根据图1可知,id=id3=0,铜损耗为

(7)
式中:R为相电阻;im为等效电流值。
将(7)式带入(1)式,消除式中iq

(8)
当iq与iq3满足(9)式中比例关系时,可以得到在铜损耗不变条件下的最大电磁转矩。

(9)
将(3)式、(5)式、(9)式带入(1)式,得到此时的最大电磁转矩
Te-max1=

(10)
式中:kt=10rslsNphBpeak。当γ=(kw/kw3)2-((kw/
kw3)4-(kw/kw3)2/3)0.5时,电磁转矩最大。以10槽8级为例,其基波绕组系数为0.951,三次谐波绕组系数为0.587 8。当γ=0.172 3时,电磁转矩最大。
2.2 最大电流值不变
相电流的表达式

(11)
当iq3≠0时,随着iq3与iq的比例不同,电流最大值所对应的转子位置也会发生改变,最大电流值与转子位置之间的关系可以分为以下2种情况

(12)
式中,χ=iq3/iq。
根据(12)式可以得到χ在不同取值范围内,iq与最大电流imax的函数关系

(13)
将(13)式带入(1)式
(14)
(15)
当χ=1/9时,(14)式取得最大值

(16)
将(3)式、(5)式带入(16)式
Te-max2=

(17)
根据(17)式可知,当γ=kw/(6kw-kw3/3)时,电磁转矩最大。以10槽8级为例,当γ等于0.172 6时,电磁转矩最大。当χ=kw/(6kw-3γkw3)时,(15)式取得最大值

(18)
将(3)式、(5)式带入(18)式
(19)
当γ=(kw/kw3)-((kw/kw3)2-(kw/3kw3))0.5时,(17)式为最大值。以10槽8级为例,当γ=0.176 3时,电磁转矩最大。
2.3 2种约束条件下的比较
假设im与imax相等,当电机的极/槽配合确定后,在2种约束条件下,最大输出转矩仅由γ决定。以10槽8级为例,根据(6)式、(10)式、(19)式,可以得到在3种条件下,最大输出转矩随γ增加变化趋势,如图2所示。从图2可知,在任何约束条件下,最大输出转矩都是随着γ增加先增大后减小的。最大电流不变与铜损不变2种约束条件下最高值点由kw与kw3共同决定。同基于铜损不变的约束条件相比,采用基于最大电流不变的约束条件在γ的整个取值范围内都可以获得更大的电磁转矩。以10槽8级为例,当γ小于0.172 3时,基于铜损不变的约束条件对输出电磁转矩的影响基本可以忽略不计。

图2 最大输出转矩随γ变化趋势
3 三次谐波电流控制的SVPWM
3.1 基d-q SVPWM的SVPWM1
参考电压矢量由基波分量所在扇区对应的2个大矢量和2个小矢量合成。为了实现三次谐波电流的控制,在计算每个基础电压矢量作用时间的过程中,同时要考虑参考电压矢量中基波和三次谐波分量。首先根据基波参考电压矢量所在扇区,选取对应的4个电压矢量组成合成矢量组。然后,根据(20)式计算得到每个非零电压矢量的作用时间

(20)
式中:κ为α-β空间基波参考电压所在的扇区。
根据(20)式和采样周期得到导通时刻
(21)
根据(21)式和参考电压矢量所在扇区,即可得到具体每一相对应的导通时刻,其与传统四矢量合成中导通时刻对应关系相同[13]。当参考电压矢量处于扇区中间位置时,利用率最低;当参考电压矢量处于扇区两边时,利用率最高。假设Vref3在x-y子空间中第二扇区中间位置时,Vref1处于α-β子空间中的第一扇区中间位置,v16与v29的作用时间相同,v24与v25的作用时间相同,所以Vref1,Vref3有
(22)
式中
(23)
当Vref1与Vref3在各自子空间第一扇区右边位置时,v24与v29作用时间为零。由于在一个360°电角度周期内参考电压矢量幅值处处相等,所以Vref1,Vref3有
(24)
式中
(25)
由于逆变器功率等级的限制,相电压的最大值不能超过0.5udc,因此,tlr1|θ=0°与tmr1|θ=0°需满足以下的限定条件
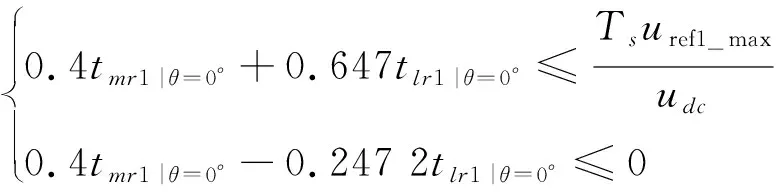
(26)
将(22)式与(24)式做差,整理后
(27)
将(27)式带入(23)式
(28)
根据(25)式、(26)式及(28)式可得到tlr1|θ=0°与tmr1|θ=0°的取值区间,进而可得到以下结论:①当tlr1|θ=0°=1.618tmr1|θ=0°,Vref3等于零,随着tmr1|θ=0°增加,|Vref1|不断增加。tmr1|θ=0°最大取值为0.382Ts,此时,最大基波电压的利用率为1.051 4;②当tlr1|θ=0°>1.618tmr1|θ=0°,Vref3为负值,随着二者之间比值不断增大,|Vref3/Vref1|也随着增大;③tlr1|θ=0°/
(1.618tmr1|θ=0°)不大于5.236 4,|Vref3/Vref1|≤0.236,且最大基波电压利用率随着tlr1|θ=0°/tmr1|θ=0°比值的增加而增加。
3.2 基于双d-q SVPWM的SVPWM2
在α-β坐标系上具有相同相角的大矢量与中矢量,在x-y坐标系中对应的伴随电压矢量相角相差为180°;在x-y坐标系中具有相同相角的大矢量与中矢量,在α-β坐标系上对应的伴生电压矢量相角同样相差为180°。因此可以通过分别控制2种子空间内大矢量与中矢量的作用时间比为1.618∶1,使合成后的电压矢量在其他子空间中的伴随电压矢量幅值为零,从而实现基波(与三次谐波)参考电压矢量合成过程的相互独立,互不干涉。首先,根据Vref1和Vref3的方向,判定Vref1和Vref3在相应子空间内对应的扇区,从而得到参与合成的矢量组,电机转子每旋转10°电角度,参与合成的矢量组改变一次;然后,将基波和三次谐波参考值分别带入(29)和(30)式,依次得到α-β坐标系与x-y坐标系中各自中矢量作用时间。
(29)
(30)
式中:ι为x-y空间三次谐波参考电压所在的扇区。
根据(29)和(30)式和采样周期得到导通时刻
(31)
根据(31)式、Vref1和Vref3所在扇区,得到每一相对应导通时刻。其中基波参考电压矢量所在扇区与每一相导通时刻之间的对应关系和SVPWM1中是一致。三次谐波参考电压矢量所在扇区与每一相导通时刻之间的对应关系,如表1所示。通过将基波与三次谐波参考电压对应的导通时刻相叠加,即可得到功率器件的导通时刻。当Vref1位于α-β子空间中Ⅰ扇区中间,Vref3位于所在x-y子空间Ⅱ区域中间时,u16-25与u24-29合成Vref1,u4-21与u20-23合成Vref3。u16-25与u24-29作用时间相同,u4-21与u20-23作用时间

表1 三次谐波参考电压矢量对应的导通时刻
相同,各虚拟电压矢量作用时间和Vref1和Vref3之间关系满足
(32)
式中:tr1|θ=18°为u16-25与u24-29的作用时间,tr3|θ=18°为u4-21与u20-23的作用时间,2个矢量的作用时间满足以下约束
(33)
当Vref1和Vref3都位于相应子空间中Ⅰ扇区右边,u24-29与u20-23作用为零。各虚拟电压矢量作用时间和Vref1,Vref3之间关系满足
(34)
式中:tr1|θ=0°为u16-25的作用时间,tr3|θ=0°为u16-22的作用时间,2个矢量的作用时间满足以下约束
(35)
对(32)式与(34)式做差,整理后
(36)
将(36)式带入(33)式
(37)
由于相电压幅值的限制tr1|θ=0°与tr3|θ=0°还需满足以下的限定条件

(38)
结合(37)式、(38)式得到tr1|θ=0°与tr3|θ=0°的取值区间。根据SVPWM2算法中基础矢量作用时间的计算方式可知,Vref3/Vref1=tr3|θ=0°/tr1|θ=0°,因此,tr3|θ=0°/tr1|θ=0°的比值不会大于1。
3.3 基于多维度SVPWM的SVPWM3
开关状态与相电压的对应关系

(39)
式中,sτ依次对应着每相桥臂的工作状态,sτ∈{0,1}。
由5相相电压得到基础电压矢量在α-β子空间与x-y子空间的表达式

(40)
式中:下标h=(sa,sb,sc,sd,se)∈{0,1,2…31}。
根据(39)式与(40)式可以发现,所有开关状态对应的电压矢量均可以分解为5个基础向量v1,v2,v4,v8,v16。同理,由基础电压矢量合成的基波参考电压矢量和三次谐波参考电压矢量也可以分解为5个基础向量v1,v2,v4,v8,v16,5个基础向量的作用时间依次对应着五相VSI中每一相的导通时间

(41)
根据(39)式与(40)式分别得到v1,v2,v4,v8,v16的表达式,代入(41)式,整理后得到参考电压矢量与5相VSI的每相对应的导通时间

(42)
5相VSI,每相的导通起始时刻
tτ=0.5(Ts-Tτ)
(43)
在SVPWM3算法中对电机中性点电压进行控制,取中性点对地电压为0.5udc,因此,每一相相电压最大不超过0.5udc。以A相为例进行说明,A相相电压方程
va(θe)=-Vref1sin(pnθe)-Vref3sin(3pnθe)
(44)
随着Vref1和Vref3之间的比例不同,A相相电压最大值所对应的转子位置也会发生改变。电流与电压方程结构相似,因此最大值对应的转子位置也相同,将(12)式带入(44)式

(45)
为了使A相相电压的最大值不大于0.5udc。根据(45)式,可以得到η不同取值范围内Vref1的最大值。当0<η≤1/9时,Vref1=0.5udc/(1-η);当η>1/9,Vref1=1.5(3η)0.5udc/(3η+1)1.5。
3.4 3种SVPWM的电压利用率比较
根据3.3节中的论述,可以得到3种算法基波电压利用率随Vref3/Vref1增加的变化趋势,如图3所示。
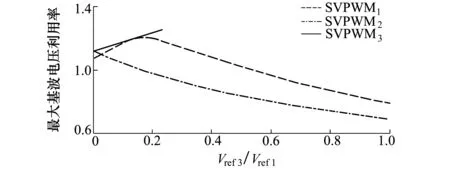
图3 3种SVPWM,基波电压利用率随Vref1/Vref3变化
从图3可以得到以下结论:①当Vref3等于零时,采用SVPWM1与SVPWM2对应的最大基波电压利用率一样,为1.051 4,高于SVPWM3,SVPWM3的最大电压利用率等于1;②随着三次谐波电压的注入,SVPWM1的电压利用率不断增加,SVPWM2的电压利用率不断减小,SVPWM3先增加后减小,当Vref3/Vref1=0.183 5时,其对应最大基波电压率用率最大;③当Vref3/Vref1∈(0,0.025),SVPWM1对应的最大基波电压利用率最高,SVPWM2次之,SVPWM3最小。当Vref3/Vref1∈[0.025,0.236],SVPWM1的最大基波电压利用率最高, SVPWM3次之,SVPWM2最小。当Vref3/Vref1∈(0.236,1],SVPWM1不在适用,SVPWM3的最大电压利用率大于SVPWM2。
4 实验结果
实验测试平台如图4所示。主控单元采用的数字信号处理器 (DSP),用于实现3种SVPWM算法和电流给定值计算,实验电机参数如表2所示。

图4 实验平台

表2 五相PMSM主要参数


图5 SVPWM1,iq=1.5,iq3=0 图6 SVPWM2,iq=1.5,iq3=0

图7 SVPWM3,iq=1.5,iq3=0 图8 中性点对地电压

图9 SVPWM1,iq=1.7,iq3=0.283 图10 SVPWM2,iq=1.7,iq3=0.283

图11 SVPWM3,iq=1.7,iq3=0.283
而且随着基波参考电流的增大,以及三次谐波电流的注入,增加了负载转矩的输出,导致转速升高,从而使相电压的幅值与频率也随之升高。
5 结 论
在此基础之上,文中对比了3种用于三次谐波电流控制的SVPWM。3种方法中SVPWM3的计算量最小,最大基波电压利用率随Vref3/Vref1增加先增加后减小。除此之外,同其他2种算法相比,采用SVPWM3算法电机绕组中没有5次共模电压存在。SVPWM2与SVPWM3可以注入任何比例的三次谐波,而SVPWM1的注入比例不能大于0.236。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
莆田学院学报(2021年5期)2021-11-13 06:36:38
甘肃科技(2020年20期)2020-04-13 00:30:22
测控技术(2018年9期)2018-11-25 07:44:40
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年1期)2016-04-12 00:35:12
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年14期)2016-04-11 12:32:40