时速160~200 km中速磁浮受流系统动力学研究
2021-09-04 07:25周策罗世辉马卫华
机械 2021年8期
周策,罗世辉,马卫华
时速160~200 km中速磁浮受流系统动力学研究
周策,罗世辉,马卫华
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
为了研究中速磁浮受流器在160~200 km/h速度等级下的运行状态,使用SIMPACK软件建立自由度为134的新型中速磁浮车辆动力学模型,计算得到160 km/h、180 km/h、200 km/h三种速度工况下的车辆右前侧受流器安装位置振动响应。将振动响应作为外部激励导入受流器-供电轨(靴轨)动力学模型,分别计算出三种速度下,静态接触力预设为120 N、130 N、130 N、140 N、140 N、150 N时受流器滑靴与供电轨间的动态接触力。结果表明,要使受流器在该速度工况下均能稳定工作,静态接触力预设值应分别不低于130 N、140 N、150 N。
新型中速磁浮列车;受流器;动力学仿真;接触力
磁浮列车作为一种新型交通工具,因其乘优良坐舒适性、噪声低、爬坡能力强等特点而获得快速发展,其中具有代表性的为德国高速TR系列以及日本中低速HSST系列[1-2]。对中低速磁浮列车而言,其采用侧接触式受流方式,即通过位于悬浮架托臂下方的受流器与铺设在轨道梁侧部的接触轨相互接触获取车辆运行所需要的电能[3]。但此受流系统也成为限制列车提速的重要因素,如何保证受流器稳定受流越来越受到重视。
Stewart[4]根据试验数据及仿真得出受流器接触力随第三轨表面高度的变化而变化,第三轨表面不平顺会导致离线、滑靴表面出现较大的接触力突变。针对中低速磁浮列车受流系统,李宁等[5]研制了一款受流器,并指出受流滑靴和受流轨之间的接触压力必须保持在一定的范围内,才能保证受流器符合列车运行的跟随性要求。在实际应用中,应适当选择材料和弹簧刚度,保证列车平稳受流。宋伟[6]研究了接触轨安装精度对中低速磁浮列车受流的影响,得出在控制总体绝对精度不超差的情况下,更要严格控制相邻支撑点间的相对误差,相对误差宜控制在±2 mm内,保证轨面的平顺性。陈明国等[7]研制了100 km/h拉簧式受流器,从结构与数值计算上证明了该受流器的可靠性。刘铭[8]以时速160 km/h磁浮列车为研究对象,通过建立受流器-供电轨刚柔耦合动力学模型,得出供电轨选型、跨距及膨胀接头选型等优化方案。张鹏飞[9]研究了膨胀接头阶跃型不平顺下受流器的通过性,得到前轨高于后轨,幅值为0~1 mm时受流器通过性较好。彭宝林等[10]研制了适用于160 km/h的气动型受流器,从结构和强度上证明了该受流器的可靠性。向枭笛[11]等针对地铁靴轨系统,分析了不同运行速度、结构参数对靴轨冲击振动相应的影响规律,结果表明,合理增加受流系统阻尼不仅可以有效改善碰撞冲击,还可以提高准高速运行条件下的靴轨匹配性能。
以上有关中低速磁浮靴轨系统动力学的研究,因受到磁浮车辆运行速度的限制,主要集中在160 km/h以内的速度等级,对于更高速度等级的靴轨系统动力学研究较少,而基于空簧中置式新型悬浮架技术所设计的6悬浮架中速磁浮车辆的理论运行速度可以达到200 km/h,因此,有必要对160~200 km/h速度等级的受流器运行状态进行分析,验证其在该速度下的匹配性。
1 中低速磁浮悬浮架结构
本文研究对象的运行速度涉及160~200 km/h速度区段,中低速磁浮车辆若采用既有的悬浮架,则很难达到所需的运行速度,因此本文以新型空簧中置式悬浮架为基础进行动力学研究,两种悬浮架结构及对比如下。
既有中低速悬浮架均以日本HSST型为代表,悬浮架呈“口”字形结构,采用倒置式小空气弹簧,且分别布置于两侧悬浮架纵梁的端部,左右两个悬浮模块依靠两组抗侧滚梁进行连接,而前后两个相邻的悬浮架之间则通过滑台建立起垂向耦合关系,如图1所示。为了对悬浮架的主体结构进行对比分析,图中省去了滑台、液压制动夹钳、螺栓等结构。
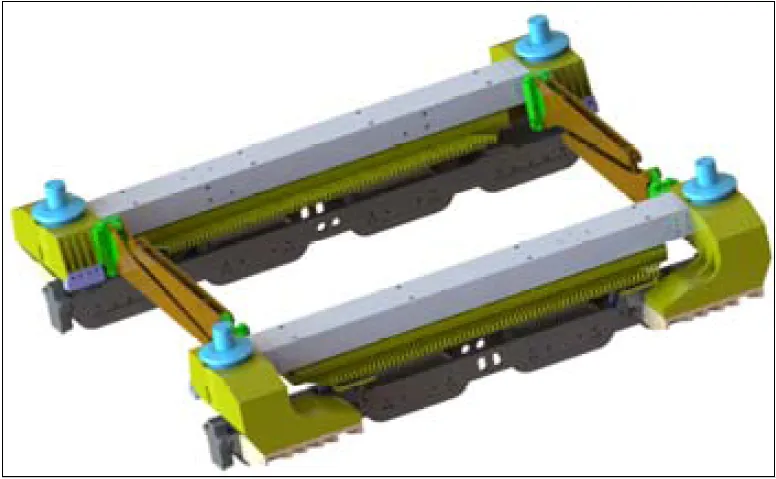
图1 既有悬浮架(日本HSST型)
新型空簧中置式悬浮架以既有悬浮架为基础进行改进,改进后的悬浮架在特征和承载上与既有悬浮架有显著变化,以适应提速和更加充分的运动解耦。悬浮架整体呈“工”字形结构,其采用正置式大空气弹簧,分置于两侧悬浮架纵梁中部,左右两个悬浮模块仅通过一组抗侧滚梁进行连接,而前后两个相邻的悬浮架之间无机械连接,如图2所示。
二者主要区别(以后者为例说明)为:
(1)悬浮架与车体间通过正置空簧中置的方式进行减振;
(2)悬浮架取消了迫导向机构,其中第1、3、4、6位悬浮架与车体之间采用直线轴承连接,第二、五位悬浮架与车体固定连接;
(3)左、右悬浮模块纵梁通过一组抗侧滚梁进行连接;
(4)由于采用空簧中置方式,悬浮架可以有更多的空间以安装功率更高的长直线电机,从而提高列车牵引性能。
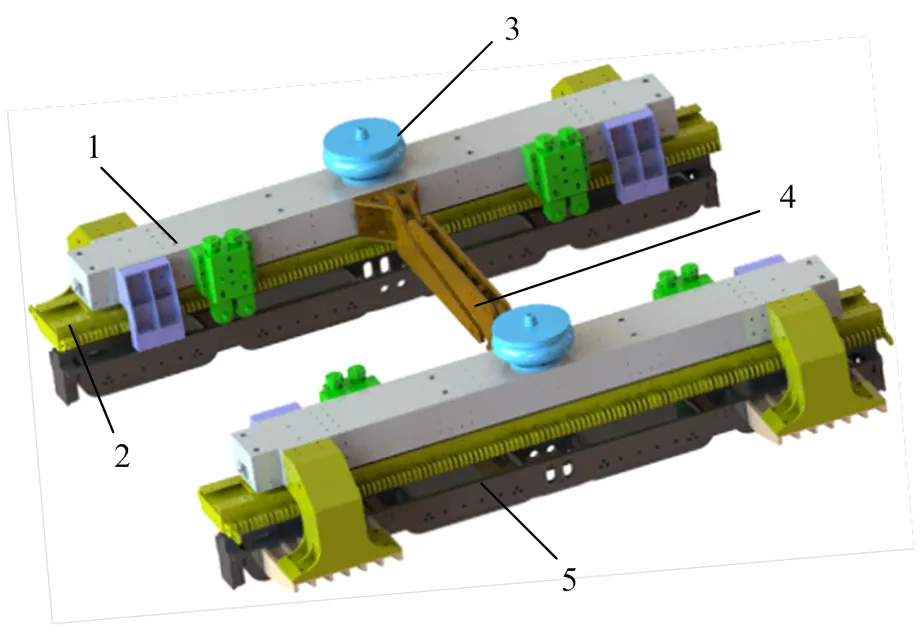
1.纵梁;2.直线电机;3.空气弹簧;4.抗侧滚梁;5.悬浮电磁铁。
2 单编组磁浮列车动力学
在动力学建模过程中,需要对磁浮列车的结构进行适当简化。本文使用SIMPACK软件建立磁浮列车动力学模型,其中包括1个车体、6个悬浮架、6组抗侧滚梁、4组移动滑台(第1、3、4、6位悬浮架)、2组固定滑台(第2、5位悬浮架)、6组牵引杆等结构,共计134个自由度。对于中速磁浮车辆动力学模型而言,常用的磁轨关系有两种,一种是悬浮控制模型,另外一种是弹簧阻尼模型。考虑到6悬浮架中速磁浮车辆共需48个控制子模型,每一个控制点本身构成一个较为复杂的动力学子系统,若采用悬浮控制模型,计算效率将大大降低。同时由于本研究只涉及直线段,而两种方法在计算直线段的平稳性、振动加速度和悬浮力时,计算精度相差较小[12],因此选择使用弹簧阻尼模型法来建立磁轨关系。整车模型如图3所示。
由于目前尚未有适用于中低速磁浮的轨道谱,本次仿真采用德国高速低干扰轨道谱[12],将轨道水平不平顺以及垂向不平顺作为外部激励进行计算,其拟合公式为:
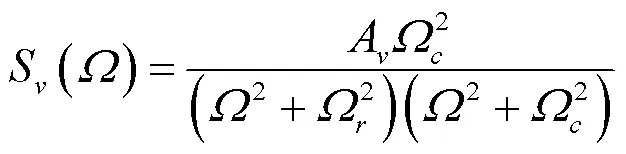
图3 6悬浮架磁浮车辆动力学模型
其横向激扰以及垂向激扰随里程的变化曲线如图4、图5所示。
2.1 仿真分析
车辆动力学仿真共设置6个速度工况:100~200 km/h(间隔为20 km/h),线路仅考虑直线段,动力学模型部分参数如表1所示。
2.1.1 车体平稳性指标
根据GB 5599-2019[13]中对于Sperling平稳性指标的加权计算方法对本文所建中速磁浮车辆的平稳性(垂向、横向)进行分析,结果如图6、图7所示。
从车辆横向以及垂向平稳性指标可以看出,无论是车辆头部还是尾部,其平稳性均随车辆运行速度的增大而增大,车辆头部平稳性略优于尾部,但均未超过2.5,平稳性等级属于优秀。
车辆平稳性指标表明车辆在所涉及速度下均以稳定状态运行,后续靴轨系统动力学研究在此基础上展开。
2.1.2 受流器安装位置点动态响应
对于6悬浮架中速磁浮列车而言,受流器分别安装于第2位、第5位悬浮架的四个托臂下方,呈左右对称分布,共计8个,以R标识前进方向的右侧,以F、B标识受流器在悬浮架上的前、后顺序,如图8所示。
考虑到悬浮架左右模块具有对称性,因此仿真时仅以右侧受流器安装位置2R-F位为研究对象,同时选取160~200 km/h(间隔20 km/h)共计3个速度工况进行分析。
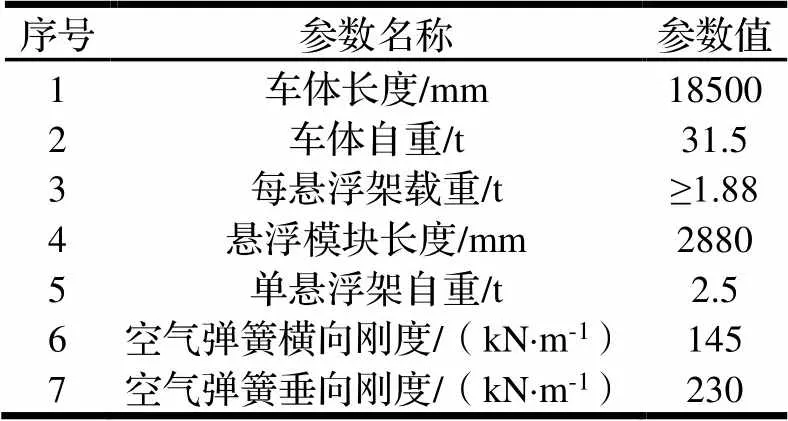
表1 动力学模型部分参数
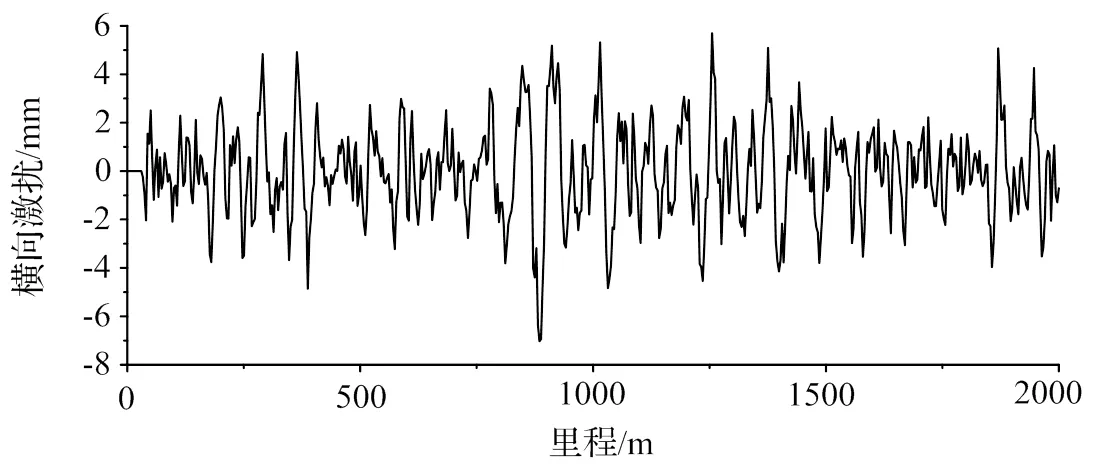
图4 横向激扰
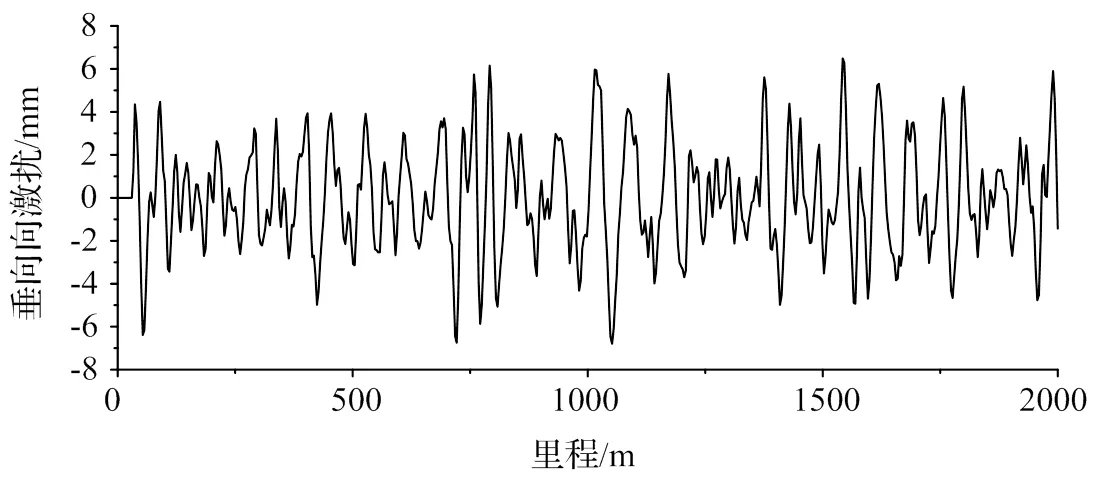
图5 垂向激扰
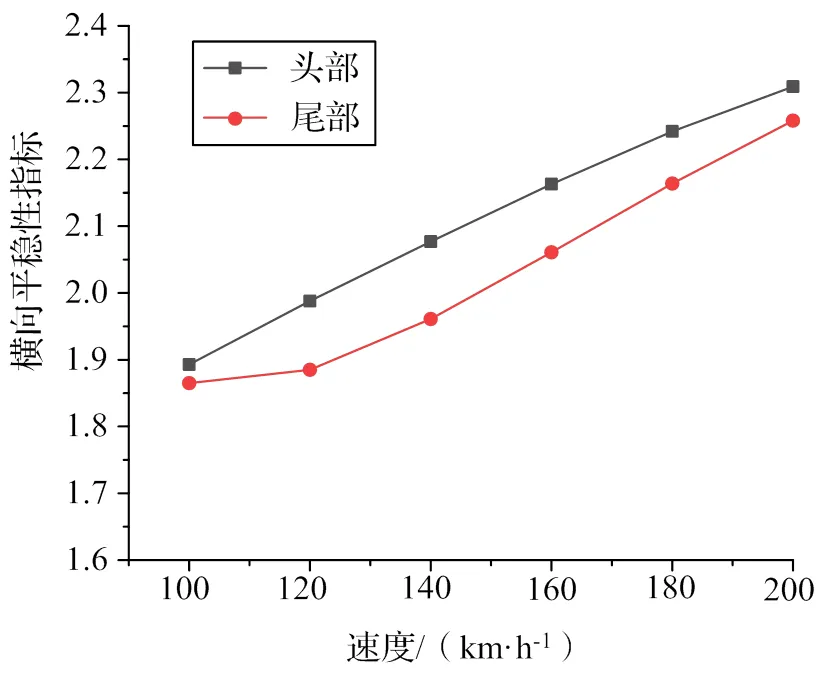
图6 车体横向平稳性指标
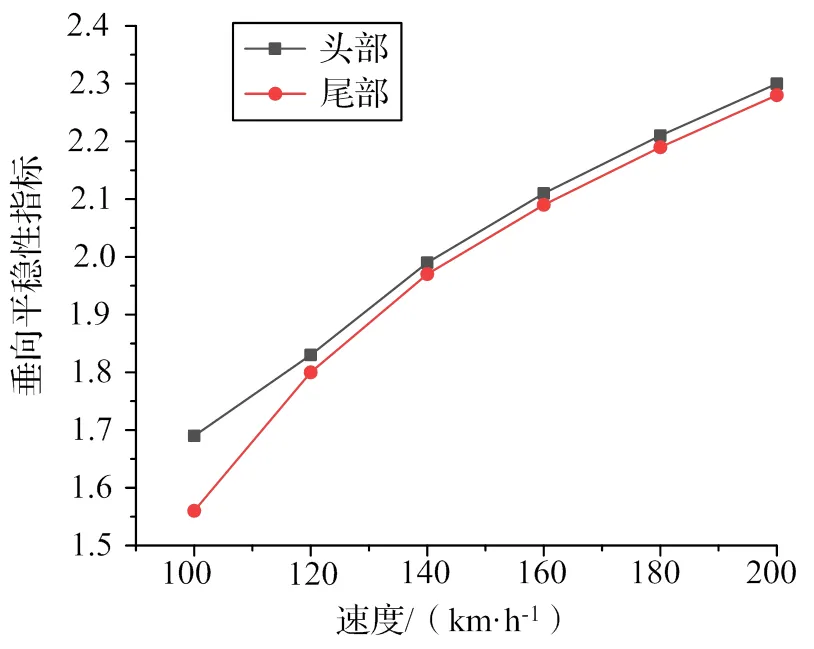
图7 车体垂向平稳性指标

图8 受流器布置
图9为160~200 km/h速度下,受流器安装位置点的横向位移,从图中可以看出受流器安装位置点的横向位移随着磁浮车辆运行速度的增大而增大,其正幅值均不超过6 mm,负幅值均不超过5 mm。
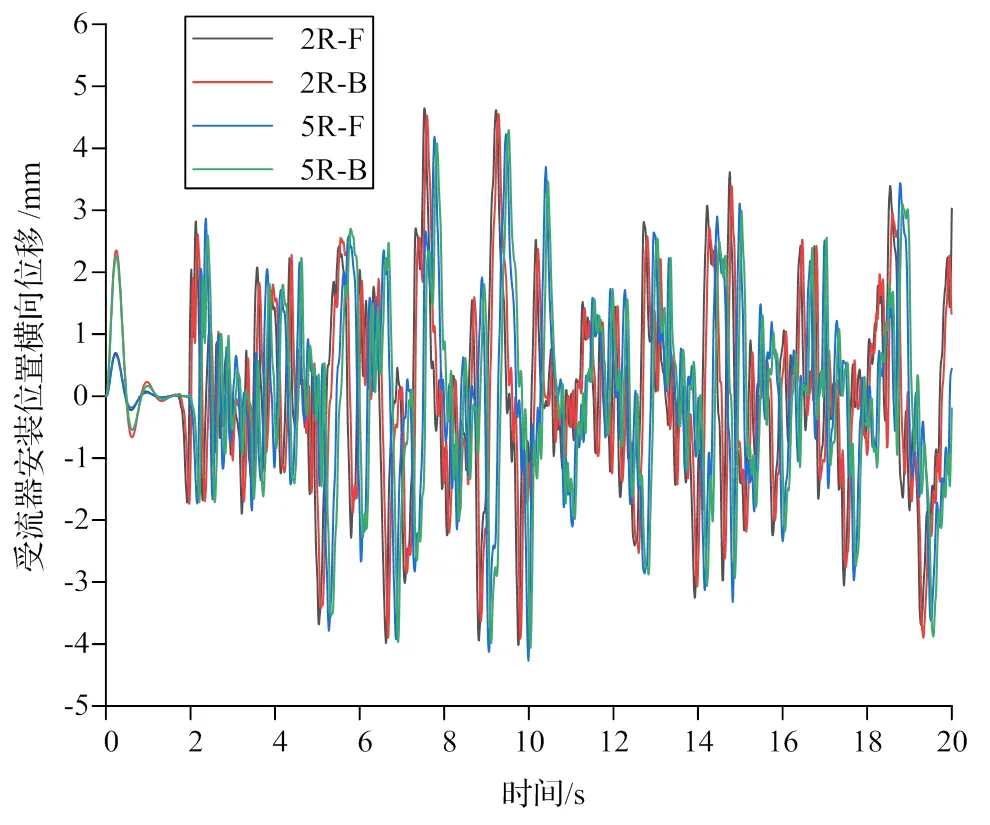
图9 受流器安装位置点横向位移
图10为160~200 km/h速度下,受流器安装位置点的垂向位移,从图中可以看出受流器安装位置点的垂向位移随着磁浮车辆运行速度的增大而增大,其正幅值均不超过9 mm,负幅值均不超过7 mm。
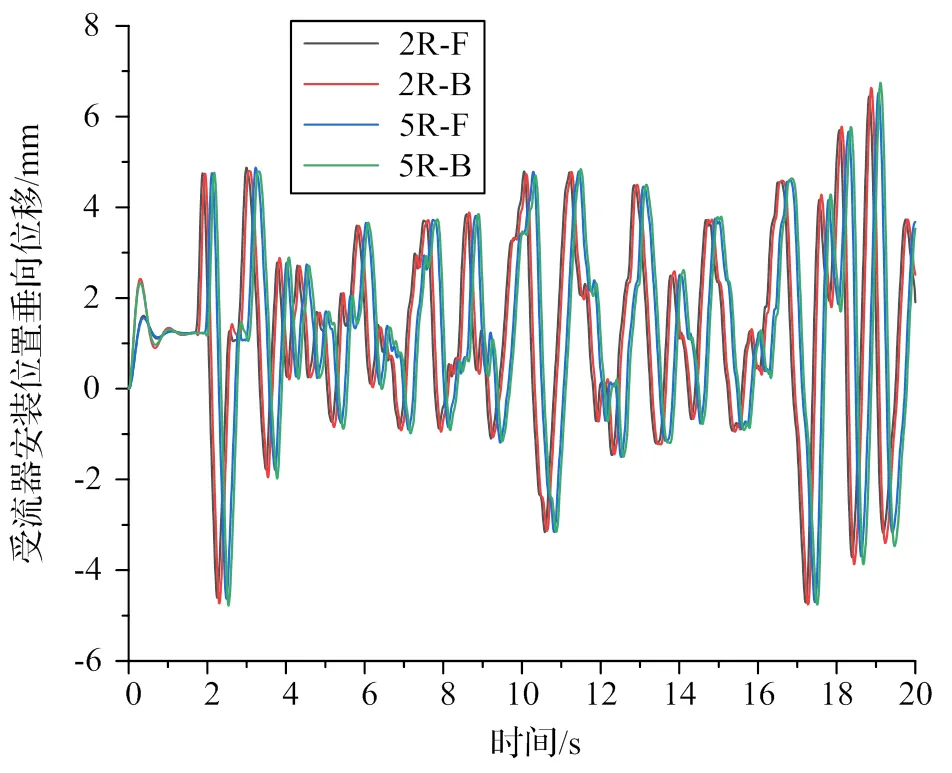
图10 受流器安装位置点垂向位移
3 靴轨系统
中速磁浮受流系统采用侧接触受流方式,即通过受流器与供电轨(常见形式分为工字轨与C型轨)接触获取电能,受流器工作时的额定电压/电流为DC 1500 V/600 A。
本文所选中速磁浮车用拉簧式受流器滑靴工作范围为0~40 mm,其结构如图11所示。出于轻量化以及经济性的考虑,摆臂机构采用铝合金铸件,滑靴通过使用浸金属碳材料,以达到提高耐磨耗性以及降低噪声的目的。弹簧系统与摆臂机构的下臂相连,带动整个连杆机构运动。根据不同工况的需要,通过调节螺旋弹簧的长度,设置不同弹簧预紧力,使靴轨间的接触压力保持在某一稳定范围内,其标准额定接触压力为120±30 N。
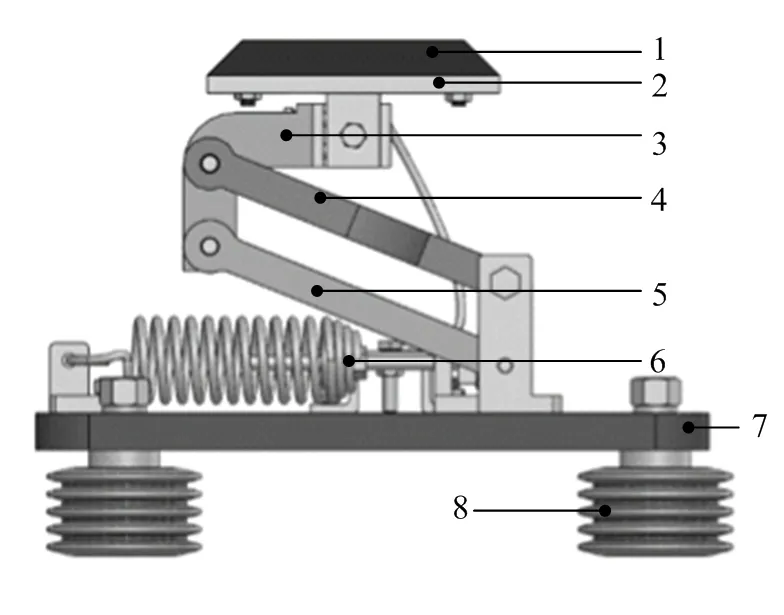
1.滑靴;2.滑靴座;3.连杆;4.上臂杆;5.下臂杆;6.拉簧;7.绝缘板;8.绝缘子。
3.1 靴轨动力学模型
在多体动力学软件中建立受流器与供电轨动力学模型,其中供电轨轨面不平顺选取前述德国高速低干扰谱幅值的一半[14]。
受流器拉簧刚度为13300 N/m,滑靴与供电轨接触刚度为3×107N/m。受流器与供电轨动力学模型如图12所示。
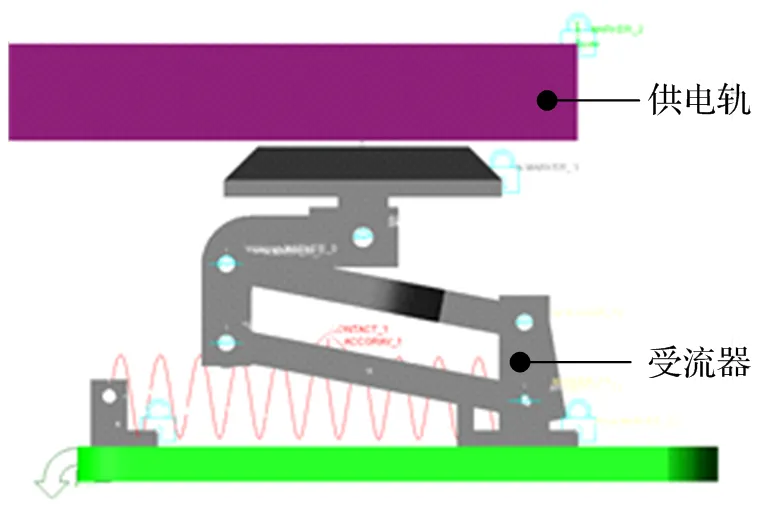
图12 靴轨动力学模型
所用受流器材料参数见表2。
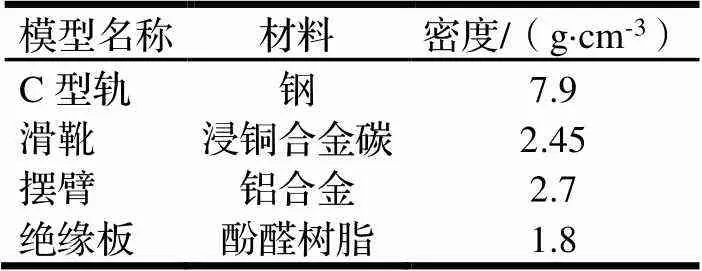
表2 模型材料
3.2 仿真分析
受流器通过绝缘板固定安装在悬浮架上实现随车运动,因此为了考虑中速磁浮车辆运行对受流器工作的影响,在绝缘板处设置驱动,并将此前得到的受流器安装位置点的位移作为外部激励,导入到靴轨系统动力学模型中,根据使用经验,利用三次样条(CUBSPL)插值法将其添加到受流器绝缘板处设置的驱动中。
通常受流质量评价指标包括接触力最大值、最小值、平均值、标准差等,本文选取接触力平均值、标准差进行统计分析。
动态接触力的平均值为:
动态接触力标准差为:
式中:为动态接触力的标准差,N。
接触力标准差反映靴轨间动态接触力波动情况,标准差越小,表明动态接触力波动越小,即受流越稳定,反之则越差。
依据空簧中置式磁浮车辆能够达到的运行速度,靴轨系统动力学仿真共设置有160 km/h、180 km/h、200 km/h三种速度工况,其中,160 km/h速度工况分别设置120 N、130 N靴轨静态接触力,180 km/h速度工况分别设置130 N、140 N靴轨静态接触力,200 km/h速度工况分别设置140 N、150 N靴轨静态接触力,共计六种仿真工况。
图13为160 km/h速度工况下的仿真结果。从图13(a)可知,当中速磁浮车辆运行速度为160 km/h时,如果靴轨间的静态接触力设置为120 N,则在运行过程中会出现动态接触力为0的情况,即发生离线现象。从图13(b)可知,当静态接触力增加到130 N时,运行过程中的动态接触力均大于0,表明受流器能够稳定工作。
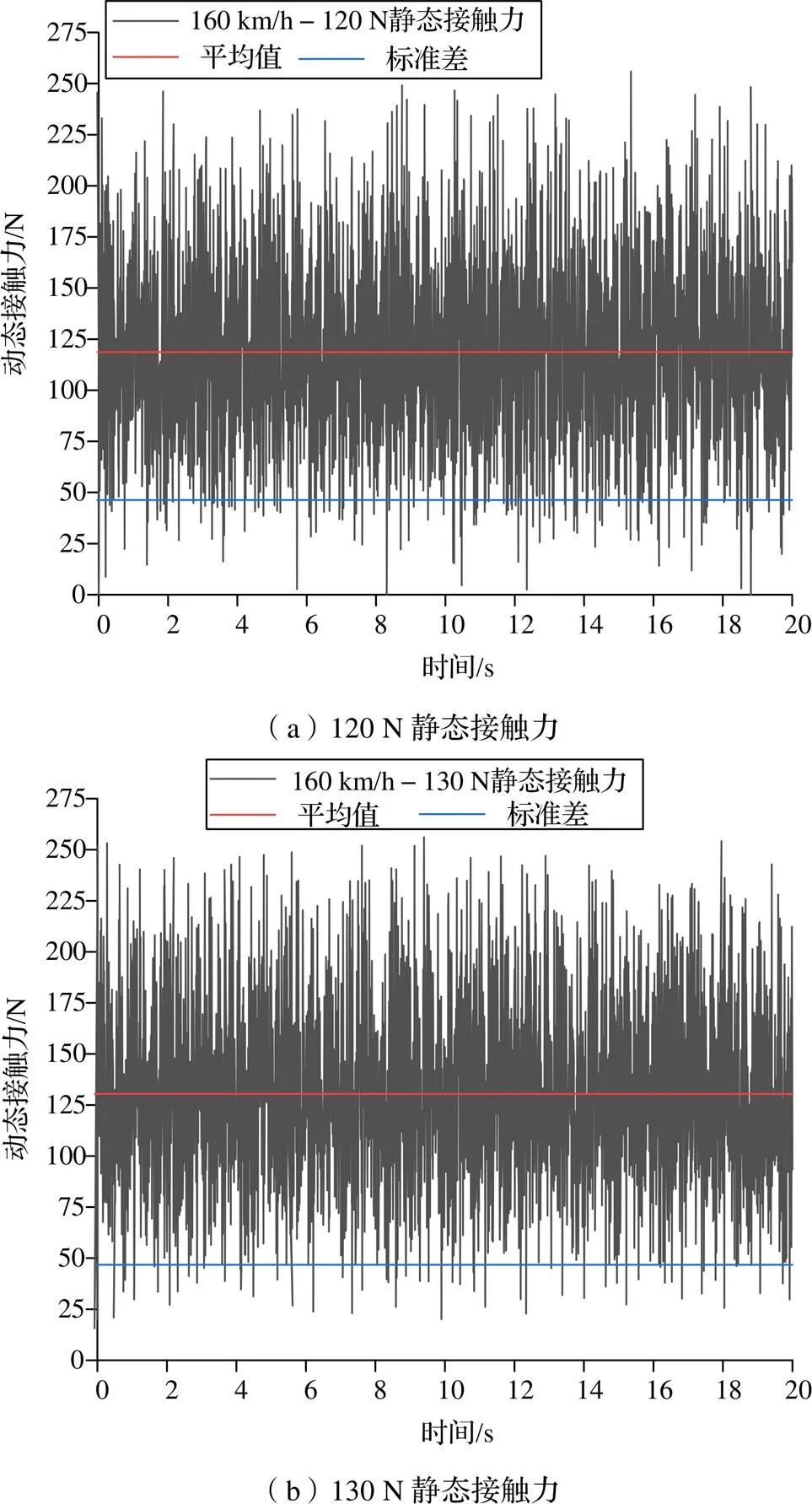
图13 160 km/h-动态接触力
图14为180 km/h速度工况下的仿真结果。从图14(a)可以看出,当中速磁浮车辆运行速度为180 km/h时,若靴轨间静态接触力设置为130 N,则会发生离线现象。由图14(b)可知,当静态接触力增加到140 N时,动态接触力均大于0,表明受流器能够稳定工作。
图15为200km/h速度工况下的仿真结果。从图15(a)可以看出,当中速磁浮车辆运行速度为200 km/h时,若靴轨间静态接触力设置为140 N,则会出现发生离线现象。由图15(b)可知,当静态接触力增加到150 N时,动态接触力均大于0,表明受流器能够稳定工作。
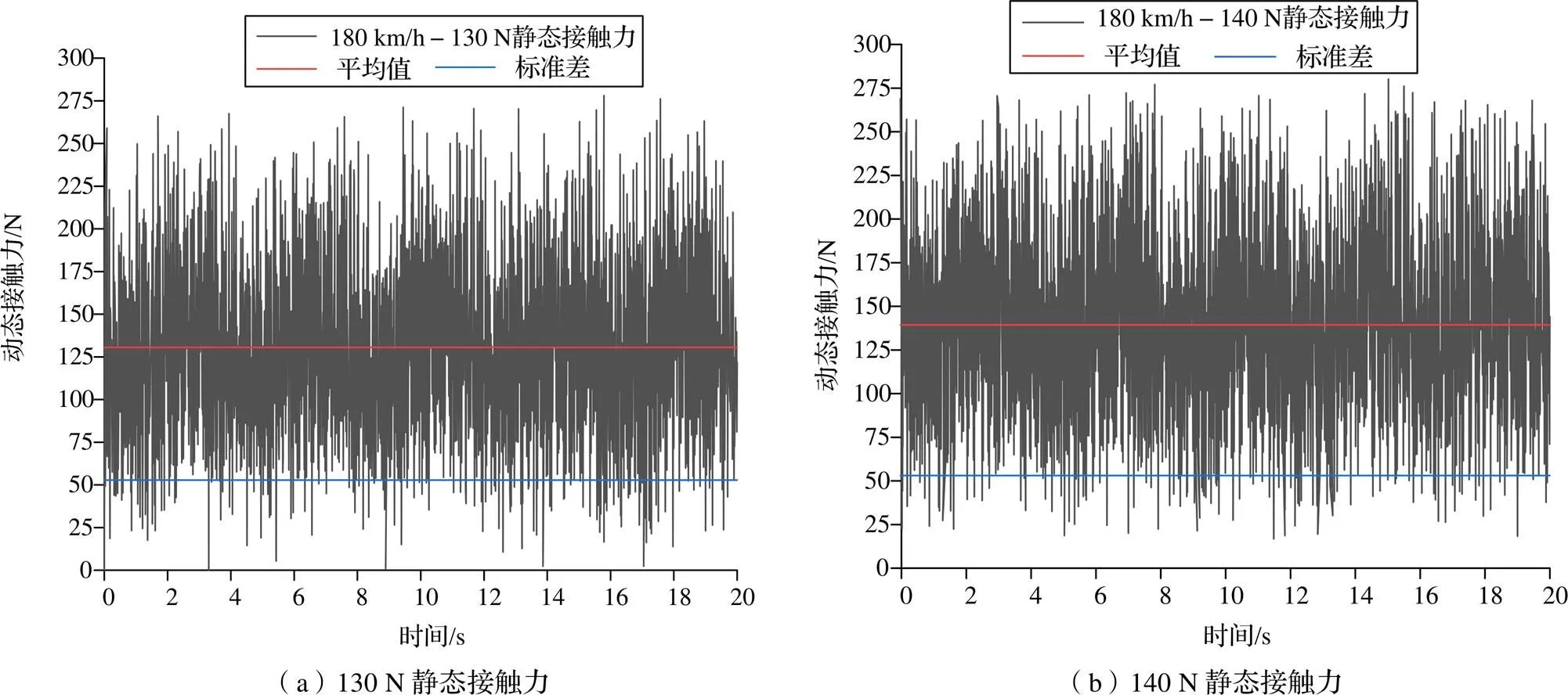
图14 180 km/h-动态接触力
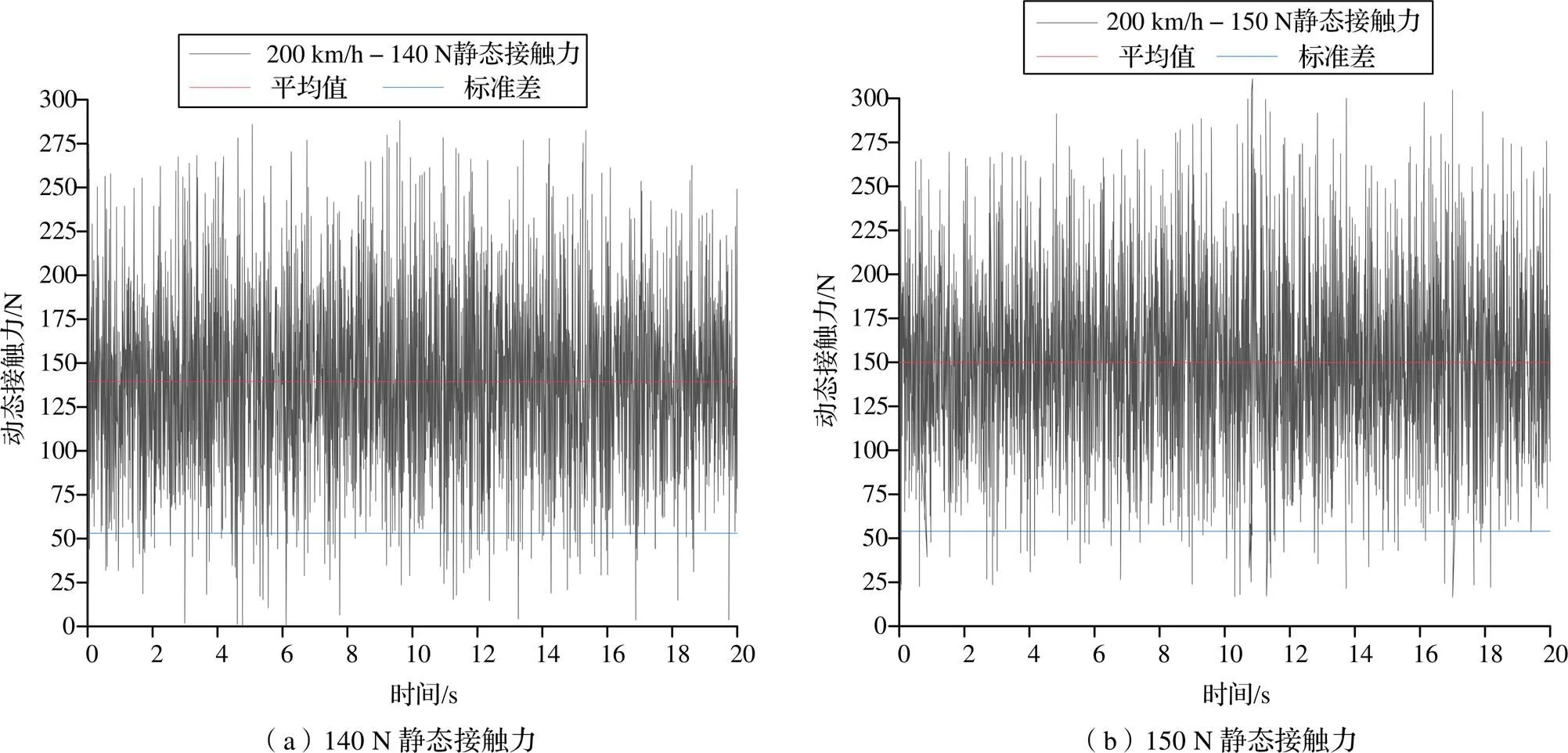
图15 200 km/h-动态接触力
图16为3种速度工况、不同静态接触力下,动态接触力的平均值以及标准差的对比结果。从图16可以看出,随着中速磁浮车辆运行速度的增大,要保证受流器能够正常工作,即靴轨间动态接触力始终大于0,静态接触力也应该设置的更大,但在160~200 km/h运行速度下,弹簧力预设值均在其静态压力调节范围内。而与之伴随的是,动态接触力平均值以及动态标准差也呈现增大的趋势,表明受流器在该速度工况下运行时,动态接触力波动增大,有加剧受流器滑靴磨耗的风险。
4 结论
基于6悬浮架空簧中置式新型中速磁浮车辆,针对160~200km/h运行速度下受流器运行状态,进行了共计6组动力学仿真,从靴轨间动态接触力方面对受流器受流质量进行评估,结果表明受流器能够匹配该速度运行,所得主要结论如下:
(1)6悬浮架空簧中置式新型中速磁浮车辆在100~200 km/h速度工况下,其横向以及垂向平稳性指标均不超过2.5,属于优秀等级。
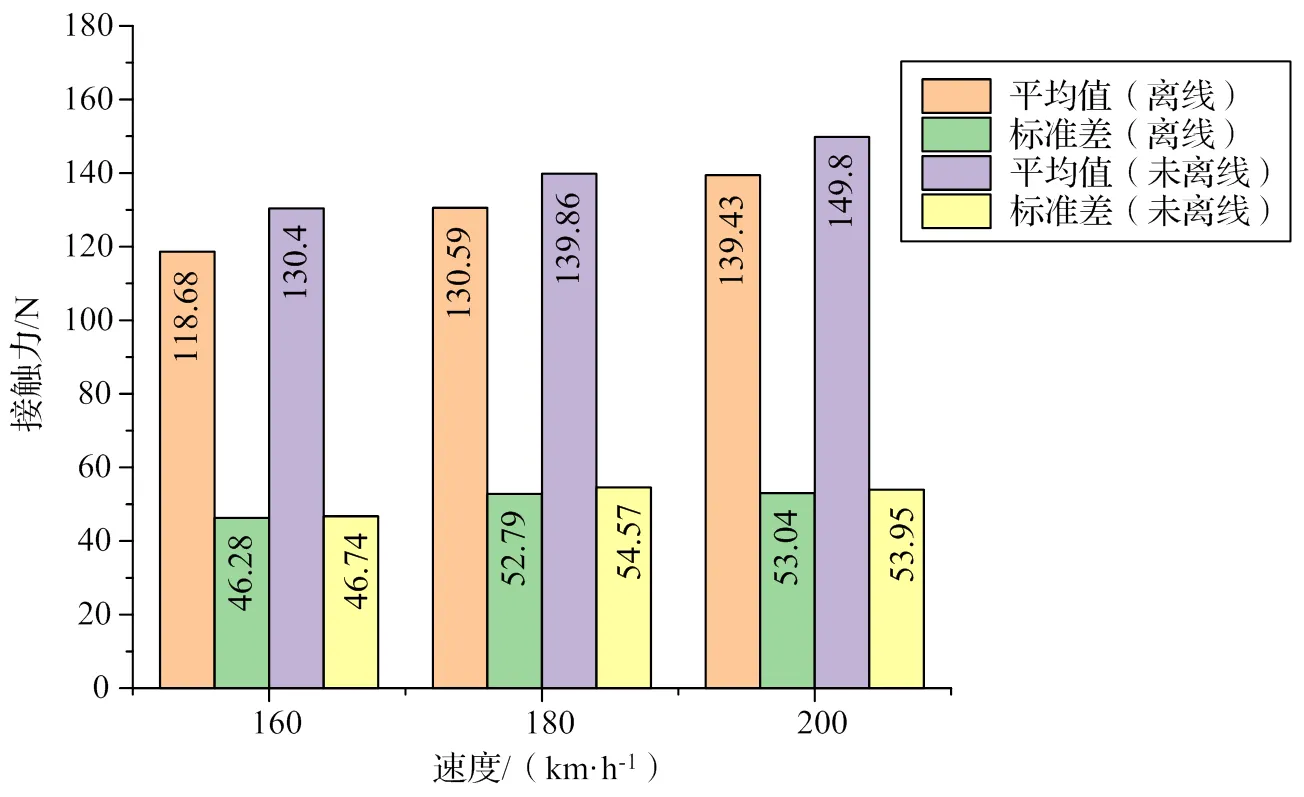
图16 动态接触力对比结果
(2)在160~200 km/h运行速度下,2R-F受流器安装位置点的横向及垂向位移均随车辆运行速度的增大而增大。
(3)在本文中所设的工况下,当考虑车辆运行对受流器工作影响时,要使受流器能够在160 km/h速度下稳定工作,静态接触力设置数值应不低于130N,在180 km/h速度下,静态接触力设置数值应不低于140 N,在200 km/h速度下,静态接触力设置数值应不低于150 N。
[1]Yaghoubi H,Ziari H. Development of a Maglev Vehicle/ Guideway System Interaction Model and Comparison of the Guideway Structural Analysis with Railway Bridge Structures[J]. American Society of Civil Engineers,2011,137(2):140-154.
[2]Fujiwara O,Wang J,Ishimoto S. Environment Impact Assessment on the Tobu-Kyuryo-Line( HSST System ) in Japan[C]. Proceedings of the 18th International Conference on Magnetically Levitated Systems and Linear Drives Maglev. Atsugi,2004:632-635.
[3]陈屹. 城市轨道交通四轨供电方式的探讨[J]. 电气化铁道,2010(2):49-50.
[4]Stewart E,Weston P,Hillmansen S,et al. Using Bogie-Mounted Sensors to Understand the Dynamics of Third Rail Current Collection Systems. Proceedings of the Institution of Mechanical Engineers,Part F: Journal of Rail and Rapid Transit,2011,225(2):219-227.
[5]李宁,陈革. 常导中低速磁悬浮列车受流方式选择及受流器结构设计[J]. 电力机车与城轨车辆,2007(2):14-15,19.
[6]宋伟. 接触轨安装精度对中低速磁浮列车受流的影响[J]. 电气化铁道,2014(5):33-35.
[7]陈明国,周洁,白雪. 中低速磁悬浮列车受流器研制[J]. 机车电传动,2015(5): 29-32.
[8]刘铭. 160km/h磁浮列车靴轨系统动力学研究[D]. 成都:西南交通大学,2018.
[9]张鹏飞. 中低速磁浮列车靴轨系统优化[D]. 成都:西南交通大学,2018.
[10]彭宝林,历洋. 160 km/h速度等级磁浮列车受流器研究[J]. 机电信息,2019(11):13-15.
[11]向枭笛,罗湘萍,宫政,等. 准高速条件下三轨受流器靴轨动态接触分析[J]. 机械工程学报,2020,56(20):185-194.
[12]王波,罗世辉,汪科任,等. 不同磁轨关系对中低速磁浮车辆垂向动力学性能的影响[J]. 机车电传动,2019,82(5):82-86.
[13]国家市场监督管理总局,国家标准化管理委员会. 机车车辆动力学性能评定及试验鉴定规范:GB/T 5599-2019 [S]. 北京:中国标准出版社,2019.
[14]Xu H P,Liu Y Z,Xie X L,et al. Simulation Study on Dynamic Current Collection Characteristics of the System of Collector Shoe and Conduct Rail of Medium Speed Maglev Train[C]. Hangzhou:Chinese Automation Congress (CAC),2019.
Dynamic Study on Current Collecting System of Medium Speed Maglev at 160~200km/h
ZHOU Ce,LUO Shihui,MA Weihua
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
In order to study the operating status of the medium speed maglev current collector at 160~200 km/h speed grades, a new type of medium speed maglev vehicle dynamic model with 134 degrees of freedom was established by using SIMPACK software. The vibration response of the installation position of the right front current collector was calculated respectively at 160 km/h, 180km/h and 200 km/h. The vibration response was then imported as an external excitation into the current collector-power rail (shoe-gear rail) dynamic model, and the static contact force was preset to 120 N, 130 N, 130 N, 140 N, 140 N, 150 N at the three speeds. The results showed that in order to have the current collector work stably at this speed, the preset static contact force should not be less than 130 N, 140 N, and 150 N respectively.
new type medium speed maglev;current collector;dynamic simulation;contact force
U270.1+1
A
10.3969/j.issn.1006-0316.2021.08.005
1006-0316 (2021) 08-0029-08
2021-01-12
2019河南省轨道交通智能安全工程技术研究中心开放基金(2019KFJJ002);中铁二院工程集团有限责任公司科学技术研究计划资助(KYY2017053(17-20))
周策(1994-),男,河北石家庄人,硕士研究生,主要研究方向为磁浮列车系统动力学,E-mail:ssx3514@163.com。
猜你喜欢
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
数学物理学报(2021年3期)2021-07-19
音乐教育与创作(2020年6期)2020-08-13
音乐教育与创作(2020年6期)2020-08-13
工程与建设(2019年5期)2020-01-19
音乐教育与创作(2019年10期)2019-12-26
音乐教育与创作(2019年4期)2019-11-14
厦门理工学院学报(2016年1期)2016-12-01
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25