
三维激光异物侵限监测系统研究
2021-09-03 11:08时佳斌
铁道建筑 2021年8期
时佳斌
中国铁道科学研究院集团有限公司铁道建筑研究所,北京100081
随着我国铁路的快速发展,铁路网不断加密,列车速度不断提高,铁路事故的危害程度也在大大增加。铁路网与公路网有着大量的交叉点,其中不乏有公跨铁地段、公铁并行地段。另外,随着铁路向西南发展,山岭隧道增多,易发生异物侵限的区段增加。当发生异物侵限时,高速行驶的列车若无法及时得知运行前方的异物侵限信息,不能在到达异物侵限点之前停车,可能导致人员伤亡和经济损失。异物侵限事件的突发性和难以预测凸显了对其进行实时监控的必要性。
既有的二维激光异物侵限监测技术,存在误报率高、监测参数单一、特殊地段监测困难等问题,监测时需投入较多人力与物力,难以满足铁路异物侵限监测的实时性和准确性[1-2]。为解决该问题,开展了基于三维激光扫描技术的异物侵限监测系统研究。本文对异物侵限监测技术的研究现状、三维激光异物侵限监测系统的组成及应用予以介绍。
1 研究现状
现有的异物侵限监测技术主要分为非接触式与接触式两种。非接触式监测技术主要包括激光扫描技术[3]、红外探测技术、智能视频分析技术等[4-5]。接触式监测主要包括双电网监测技术和光纤光栅探测技术。非接触式监测技术具有受地形影响小、监测范围广、易于安装维护、可对落入监测区域的异物进行特征识别等优点[6-8]。
非接触式监测技术中二维激光扫描技术比较成熟,识别算法相对简单[9-11],故其应用较为广泛。但是,目前大部分线路为双线、曲线地段,甚至山区车站有多股道线路,需对整个线路中的轨道上方进行异物侵限监测。若仍采用二维激光扫描技术,不仅增加成本,而且存在干扰与盲区,极易出现漏报、误报现象。
2 三维激光异物侵限监测系统设计
2.1 系统组成
三维激光异物侵限监测系统由三维激光传感器、测点服务器和监控中心三部分组成,见图1。
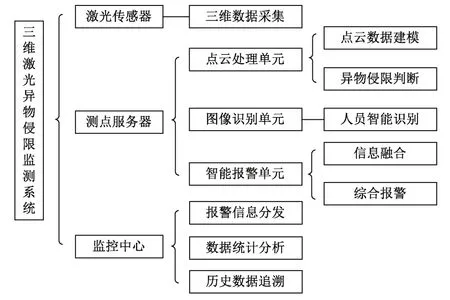
图1 三维激光异物侵限监测系统组成
2.2 数据传输流程
三维激光传感器可全天候实时生成三维点云数据,并通过局域网将数据传输给测点服务器。测点服务器实时对三维点云数据进行滤波重构,并通过异物侵限与人员识别算法进行异物侵限监测,最后将监测信息进行融合自动识别出异物位置、尺寸、数量等空间信息,通过4G网络将综合报警信息上传至监控中心。监控中心进行报警信息分发、数据统计分析及历史数据追溯。数据传输流程见图2。

图2 数据传输流程
2.3 总体技术指标
监测范围50 m,异物尺寸大于200 mm,异物侵限报警时间小于5 s。
2.4 技术特点
1)三维数据采集。系统实时采集30万个以上的三维激光点,并进行滤波处理。
2)异物三维识别。系统自动重构三维点云数据,并结合三维特征识别监测对象的数量、位置、尺寸等。
3)图像智能识别。系统基于深度学习的图像智能识别技术,自动过滤干扰因素。
4)适用性强、维护简便。系统可适用于不同复杂线路环境,全天候运行。采用模块化结构,易于维护。
2.5 异物侵限监测程序
异物侵限监测程序见图3。首先根据原始数据建立三维模型,并通过旋转、平移等操作对三维点云进行姿态补偿,使传感器坐标系与轨道平面坐标系重合;其次,由于三维点云中存在少量噪点会影响异物识别的准确性,所以须对点云进行滤波,剔除其中的离群点;最后,判断是否发生异物侵限。
若发生异物侵限系统发出预警,并保存原始点云数据与异物侵限图片,以备后续历史追溯。同时,通过识别异物侵限图片,判断是否有行人、车辆、飞鸟等侵入,以降低系统的误报率。若有侵入,系统会记录相关信息;若无侵入,系统利用聚类算法自动识别异物数量,计算出各异物位置、尺寸等空间信息,并及时报警。
3 工程现场测试
在京广铁路大庙峡隧道洞口布置三维异物侵限监测系统,对系统的功能及稳定性进行测试。系统布置见图4,三维激光扫描结果见图5。

图4 异物侵限监测系统布置
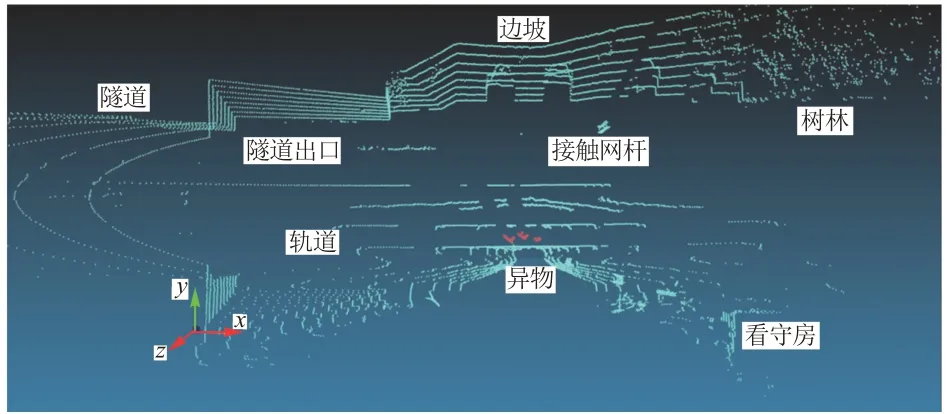
图5 三维激光扫描结果
测试过程中用纸箱模拟异物侵入,系统可以实时准确地对异物进行报警,并自动识别出异物的数量、位置、大小等空间信息,见图6。其中:Obstacles info代表系统识别的异物数量;Vol代表异物的体积;Lwh代表异物的尺寸(长、宽、高);Loc代表异物与传感器的相对位置。
4 结语
本文提出的异物侵限监测系统以三维激光扫描技术为基础,以三维点云数据重构技术为核心,并融合基于深度学习的图像识别技术,可实现对铁路沿线危岩落石段、高陡边坡、隧道洞口等易发生异物侵限区段的实时监测。
经过现场测试,该监测系统可以实时准确地识别异物,且其适用于不同复杂线路环境,可全天候运行,维护方便。
猜你喜欢
电子乐园·下旬刊(2022年6期)2022-05-16
有色金属(矿山部分)(2021年4期)2021-08-30
中老年保健(2021年9期)2021-08-24
小雪花·成长指南(2021年6期)2021-08-18
科技传播(2019年22期)2020-01-14
文萃报·周二版(2018年22期)2018-09-18
电子制作(2018年2期)2018-04-18
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
