基于机载LiDAR数字化技术的地形高空航测误差校正研究
2021-08-31 08:04袁慧敏
经纬天地 2021年3期
袁慧敏
(广东省测绘产品质量监督检验中心,广东 广州 510075)
0.引言
无人机高空作业拍摄原始图像时,受地形起伏和大气折射等因素的影响,采集图像肯定会存在一定的弯曲变形,因此,对地形高空航测误差进行校正,修复图像几何畸变,提高航测数据的后续处理速度、信息提取质量,具有重要意义。
文献[1]将大比例尺地形图作为底图,利用均匀分布、一定数量的地形控制点,根据相机参数和畸变参数,匹配地形物点和图像像点的同名点,采用多项式拟合和仿射变换两种方式,确定物点和像点三维几何位置的投影关系,校正航测图像的畸变边缘,但方法选择的畸变参数,忽略了光学畸变参数,包括径向畸变参数和偏心畸变参数,导致航测误差校正精度较差[1]。采用相机标定的非线性技术,通过最小化非线性误差方程,构建地形成像几何模型,再通过非线性技术,不断校准相机参数的初始值,重采样处理校正像素点的像素值,将采样的像元值,作为原始图像邻近像元的新值,映射变形图像至校正图像,从而消除采集图像的航测误差,但该方法内插的像元删格值,与原始删格值的差值较大,校正后的像素点存在多个像元位移,航测误差校正精度同样较差。针对这一问题,结合以上理论,设计基于机载LiDAR数字化技术的地形高空航测误差校正方法。
1.基于机载LiDAR数字化技术的地形高空航测误差校正方法
1.1 精简地形LiDAR点云数据
通过机载LiDAR数字化技术,扫描、精简地形的点云数据。利用机载LiDAR数字化技术,获取地形表面测点的点云数据,令无人机发射激光至地形控制点,把发射位置作为坐标系原点,将激光竖向和横向的扫描面,分别作为测点扫描的Z方向和X方向,令Y方向位于横向的激光扫描面,且垂直于X方向,指向地形测点,与Z方向和X方向,一起构成测点扫描的坐标系,实现地形测点的LiDAR遥感扫描[2]。扫描过程(如图1所示):
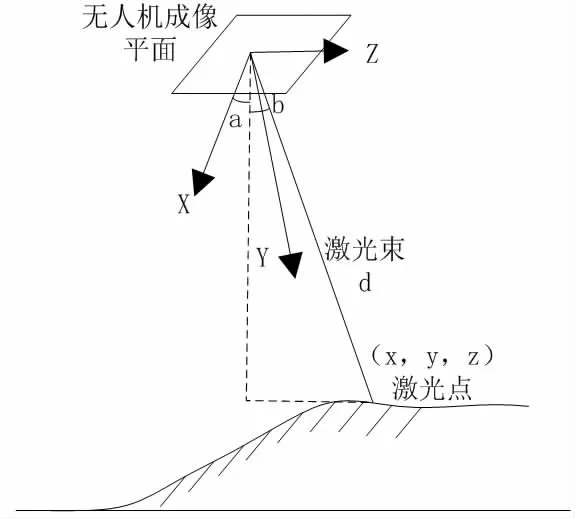
图1 LiDAR遥感扫描示意图
其中,d为仪器到地形测量点的斜距;a为激光束的水平方向角;b为竖直方向角。LiDAR测量激光点的坐标(x1, y1,,z1),表达式如式(1)所示:

通过公式(1),将地形测点的原始观测值,转换为LiDAR遥感扫描的三维空间坐标,存储数据至特定格式的文件中。初步拼接地形测点的点云数据,运用固定尺寸的裁切框,对点云数据进行拼接,裁剪框外的点云数据,获得地形测点精简后的点云数据。至此完成LiDAR扫描数据的点云精简。
1.2 变换地形点云数据坐标系
将(x1, y1,z1)作为LiDAR扫描的传感器坐标,变换各坐标系之间的坐标。采用多项式变换方式,通过旋转、平移两种变形,对高空航测的像素坐标进行非线性变换,判定机载坐标系和传感器坐标系两个坐标系,均为直角坐标系,利用原点平移和坐标轴旋转两种方式,转换机载和传感器两个坐标系,关系式如式(2)所示:

式(2)中,(x2, y2,z2)为机载坐标系的坐标点,c、d、f分别为xy坐标轴、xz坐标轴、yz坐标轴之间的方向余弦值[3]。分析机载和地面的坐标系变换关系,反映出无人机的飞行姿态。定义机载姿态角,几何剖面无人机的纵轴成像,三维表示俯仰角引起的像点几何位移,根据坐标轴对称性,令影像畸变类型,与滚动角畸变类型保持相同,保证飞行滚动角的相对独立性,判定偏航角引起的像点位移,会使航测图像发生旋转,测量预定航向和航测图像的偏航角[4]。获取成像时刻的无人机飞行姿态参数,则机载和地面两个坐标系的变换关系如式(3)所示:

式(3)中,(x3, y3,z3)为地面坐标系的坐标点;Rg、Rh、Ri分别为俯仰角、滚动角、偏航角的旋转矩阵。测量LiDAR传感器与无人机的相对位置,通过航测图像的辅助参数文件,读取传感器内方位元素,利用相对位置、内方位元素以及坐标关系式(2)和(3),建立图像和地面两个坐标系的变换关系如式(4)所示:

式(4)中,j为比例系数;(X1,Y1)为像点在LiDAR图像坐标系中的坐标。由此得到航测图像的LiDAR传感器成像模型,把图像坐标转换为地面坐标。至此完成点云数据坐标系的变换。
1.3 校正点云数据位置误差
根据传感器成像模型,建立航测平面像点,与地面物点的空间映射关系,对图像弯曲变形进行几何校正。转换航测平面至大地平面,在此基础上,为图像附上几何坐标信息,确定校正图像的列数和行数以及每个像点对应的空间坐标,利用POS参数的地理定位方式,建立图像的几何校正框架。校正图像像点和地形物点的俯仰角误差,表达式如式(5)所示:

式(5)中,m为LiDAR传感器焦距;k1为实际航测的地形高度。滚动角误差校正公式如式(6)所示:

偏航角误差校正公式如式(7)所示:

由于无人机高度变化,会令高空航测图像产生缩放,针对数据缩放误差,对比实际获取的航测图像及航高固定情况下的图像,将中心点的等比例缩放图像,归纳到正直航测的范围[5]。仅考虑无人机姿态角的高度变化,校正图像像点和地形物点的高度误差,表达式如式(8)所示:

式(8)中,k2为航测中心在地面坐标系中的高度。把航测图像X方向和Y方向的平面坐标,作为校正像素点的行向和列向,分析勘察地形和对应图像之间的共线关系,逐点计算航测图像的像素点,获得校正像素点的平面坐标。则像点和物点平面坐标的校正公式,如式(9)所示:

式(9)中,E为像元大小;(X2,Y2)为地形物点的平面坐标;(X3,Y3)为像素点在几何校正框架的平面坐标。采用双线性插值法,对航测图像进行色调信息插值,在原始图像的像素值中,内插姿态角误差、高度误差、平面坐标误差的校正图像像素值。像素点像素值的内插表达式,P如式(10)所示:

式(10)中,(X4,Y4)、(X5,Y5)分别为校正图像行列坐标的小数部分、整数部分;n为校正图像的像点像素值。通过公式(10),重采样坐标变化后的像素亮度值,令航测图像能够直接表示地形物点的平面位置和形状。至此完成地形高空航测误差的几何校正,实现基于机载LiDAR数字化技术的地形高空航测误差校正方法设计。
2.实验论证分析
将此次设计方法,与两组常用地形高空航测误差校正方法,进行对比实验,比较三组方法的航测误差校正精度。
2.1 实验准备
选择地势相对平坦的地区,作为数据采集的试验区域,涵盖水体、植被、农田等,经度、纬度分别为108°、35°,测区南北长35km、东西长为10.5km。采用UP62无人机、EOS279D红外成像光谱仪,光谱仪尺寸大小为11.0cm×11.5cm×4.8cm,质量为0.51kg,搭载平台为八旋翼电动UAV,续航时间为35~45min,机载载荷可达8.5kg,具有独立的惯性导航定位功能,抗风性强,能够满足室外环境监测要求。把光谱仪、搭载平台、微型电脑都置于无人机底部,设定航线为南北走向,Li-DAR扫描参数(如表1所示):

表1 LiDAR数字化扫描技术参数
在地面均匀布设115个控制点,用红漆标识,共采集911张航测数据,选取一幅几何特征和地物特征明显的光谱图像,作为三组方法校正的原始图像,原始图像(如图2所示):

图2 航测误差校正原始图像
该区域控制点的无人机飞行姿态信息(如表2所示):
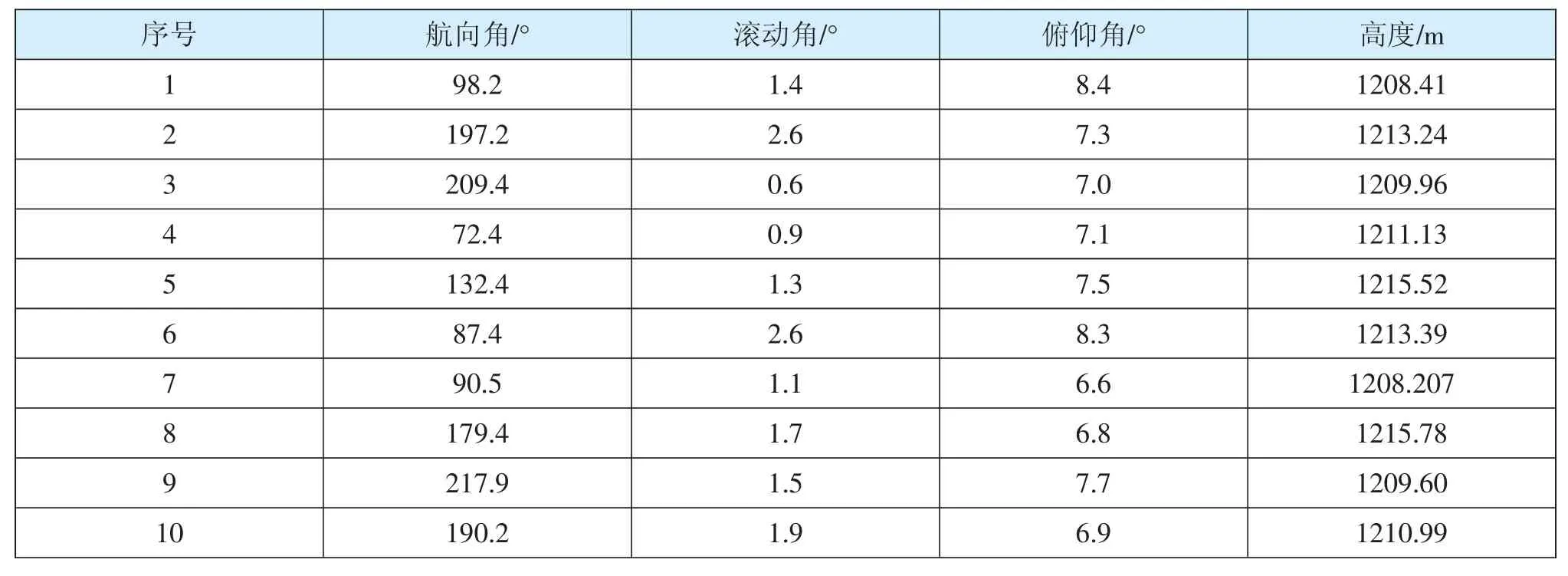
表2 无人机飞行姿态信息
2.2 实验结果
2.2.1 姿态角误差校正测试
应用三组地形高空航测误差校正方法,对原始图像的姿态角和位置坐标进行几何校正,首先,比较姿态角的校正精度。找到校正图像的标识点,与对应的地形控制点,测量标识点与控制点的俯仰角误差,测试结果(如表3所示):
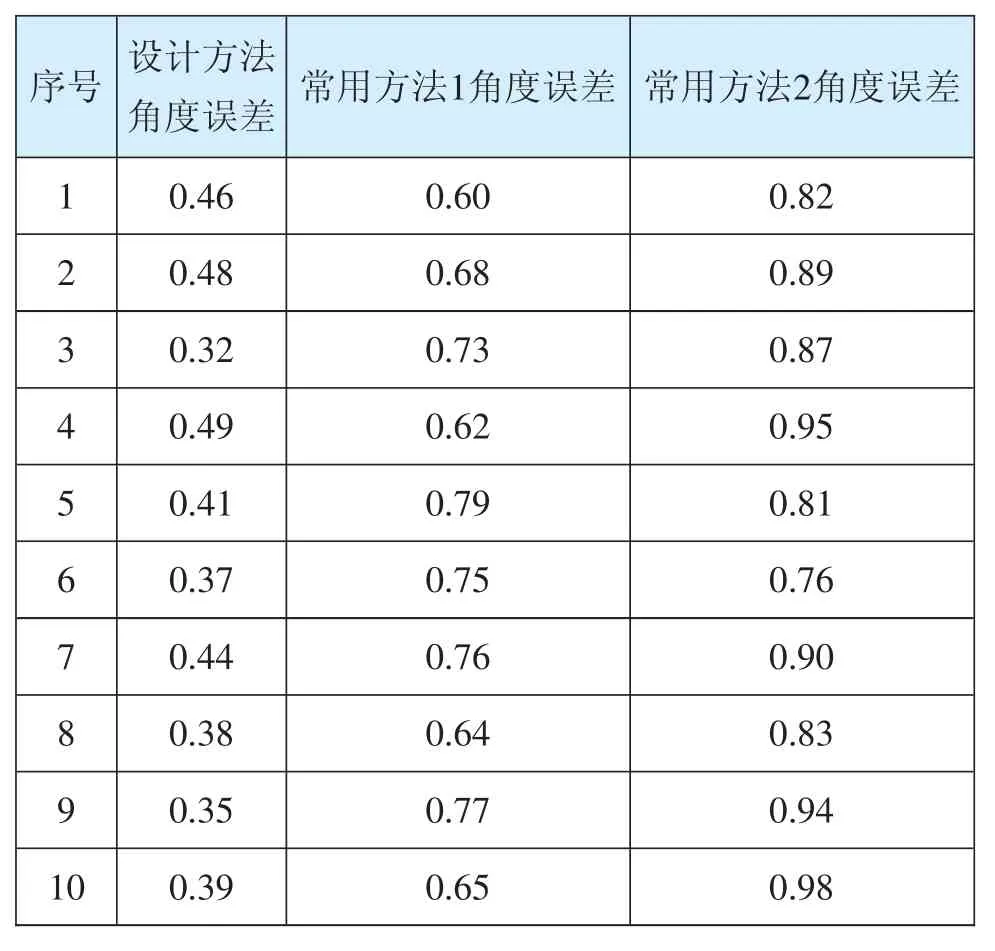
表3 俯仰角误差校正测试结果 单位:°
由表3可知:设计方法校正原始图像后,俯仰角平均误差为0.41°,常用方法1和常用方法2俯仰角平均误差,分别为0.70°和0.88°,设计方法俯仰角误差分别减少了0.29°和0.47°。滚动角误差测试结果(如表4所示):
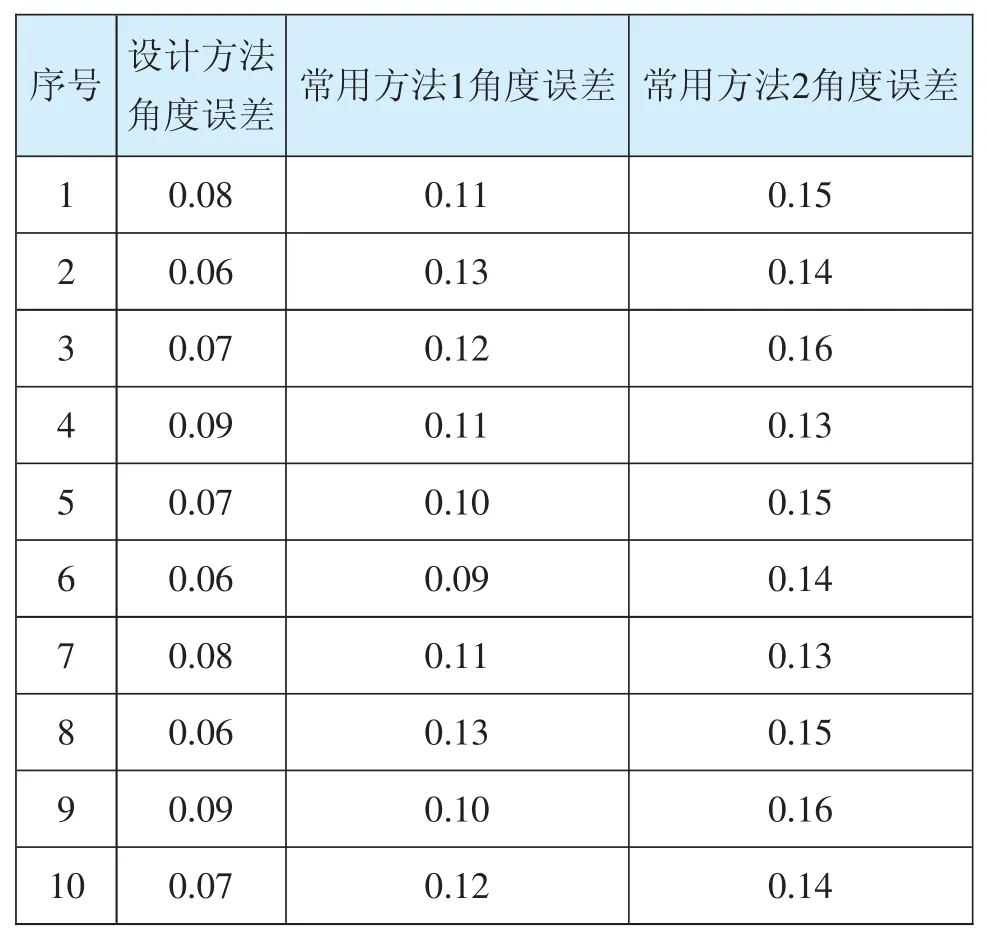
表4 滚动角误差校正测试结果 单位:°
由表4可知:设计方法校正原始图像后,滚动角平均误差为0.07°,常用方法1和常用方法2滚动角平均误差,分别为0.11°和0.15°,设计方法滚动角误差分别减少了0.04°和0.08°。偏航角误差测试结果(如表5所示):

表5 偏航角误差校正测试结果 单位:°
由表5可知:设计方法校正原始图像后,偏航角平均误差为3.47°,常用方法1和常用方法2偏航角平均误差,分别为5.50°和6.44°,设计方法偏航角误差分别减少了2.03°和2.97°。
2.2.2 位置坐标误差校正测试
测量校正图像的标识点与对应地形控制点的三维坐标,比较位置坐标的校正精度。测量标识点与控制点的高度误差,测试结果(如表6所示):

表6 高度误差校正测试结果 单位:m
由表6可知:设计方法校正原始图像后,高度平均误差为1.82m,常用方法1和常用方法2高度平均误差,分别为2.34m和2.83m,设计方法高度误差分别减少了0.52m和1.01m。测量标识点与控制点的平面坐标误差,测试结果(如表7、表8所示):

表7 行向坐标误差校正测试结果 单位:m

表8 列向坐标误差校正测试结果 单位:m
由表7、表8可知:设计方法校正原始图像后,行向坐标平均误差为0.28m,列向坐标平均误差为0.31m,常用方法1行向坐标和列向坐标的平均误差,分别为0.57m和0.57mm,常用方法2行向坐标和列向坐标的平均误差,分别为0.72m和0.76m,设计方法行向坐标误差分别减少了0.29m和0.44m,列向坐标误差分别减少了0.26m和0.45m。综上所述:此次设计方法相比两组常用方法,减小了俯仰角、滚动角、偏航角校正误差以及高度、行向坐标、列向坐标校正误差,提高了姿态角和位置坐标的校正精度。
3.结束语
此次设计方法充分发挥了机载LiDAR数字化技术优势,提高了地形高空航测误差校正精度。但此次研究仍存在一定不足,部分校正图像存在色调信息差异大的情况,在今后的研究中,会优化颜色融合算法,利用多线程并行处理方法,进一步消除航测图像的色调差异。
猜你喜欢
国学(2020年1期)2020-06-29
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
数学物理学报(2017年6期)2018-01-22
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18
中等数学(2017年2期)2017-06-01
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28