单波束与多波束测深系统在浅水区水下地形测量中的应用研究
2021-08-31 08:04刘一军
经纬天地 2021年3期
刘一军
(自然资源部第七地形测量队,海南 海口 570203)
0.引言
陆地地形图的数据可通过卫星定位系统直接测量,水下地形测量与陆地地形图测量相比具有较大难度,难以直接获取水底测量点的相关数据,在测量作业进行中需架设测深系统,并同步使用卫星定位系统,由此得出测量目标区域的三维坐标。单波束测深系统与多波束测深系统是水下地形测量的主要方式,两者分别运用于内河测量及海洋测绘中,两者在测量工作进行中具有自身特征,应结合具体情况进行相应分析。
1.单波束测深系统与多波束测深系统
本次研究中,单波束系统选择HD-27型单波束测深仪,测量工作中的主要构件包括换能器、内置显示器、外围辅助传感器、供电设备直流12V蓄电池等。多波束测深系统测量中运用的设备主要为HydroBat多波束测深仪,测量工作中使用的设备主要包括带法兰盘的安装支架、GNSS定位设备、输出220V交流电的发电机、具有PDS2000采集软件的计算机、表面声速仪、带10m电缆的铸模换能器、姿态传感器等。[1]
2.单波束测深系统与多波束测深系统作业流程分析
单波束系统测量工作中主要运用换能器垂直向下发生短脉冲声波,在作业过程中,脉冲声波触到水底时出现反射,反射回波返回声呐,并被换能器接收。单波束测深系统难以准确记录测线间点数据,主要是按照航线,以一定的时间或距离进行数据测量。单波束测量作业进行中主要是沿着河道横断面进行布设。
多波束测深系统采用与单波束测深系统一致的工作原理,通过声波反射完成测量工作,两者测量工作的差异性主要体现为多波束测深系统利用112个指向性正交的两组换能器来完成信号发射与接收。多波束测深系统操作中,在船的正下方左侧60°与右侧60°进行扫测,突破了单波束测量中只有一条测深线水深信息作业中的限制,革新了传统作业方式,在一条测线中可收纳多条水深信息,结合航船测量航迹构成一条带状水深图,以此对水下地形与地貌进行精准测量。[2]
3.单波束测深系统与多波束测深系统具体分析
本次研究选择某河的水下工程作为测深对象,该河道水下工程包括水下抛石、堤基防渗处理、河段整治、大型穿堤建筑物除险加固等构成部分,水下工程具有隐蔽性特征,不同河段的水文地质条件、河势情况等呈现一定的差异性,施工技术要求不一,给工程施工增加了一定难度。该河道某护底工程从0+530m至1+400m,工程采用1.9m×10.0m复合塑枕与1.2m×10.0m普通塑枕,内充填江沙,进行2-3层抛护,综合厚度设置为2.4m,上游迎水面坡比为1∶2.5,坝顶宽10m,下游背水面坡比为1∶3。该地下工程(如图1所示):
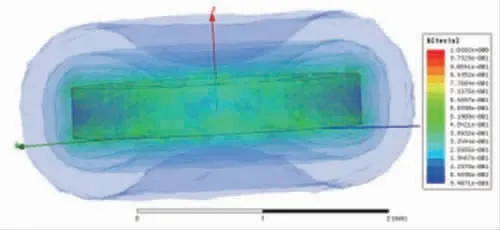
图1 该水下工程磁场测量仿真效果图
本次研究选择的河段为感潮河段,涨潮与退潮时间分别为3h、9h,涨潮时流速极快,最高达3.0m/s以上,汛期的水流量极大,最高可达8.5×104m/s。某处水深最高达-60m,水面宽1400m,水下地形地理条件较为复杂,给水下工程施工带来较大难度,需对河道进行准确测深,准确掌握工程河道的相关地理信息,以促进水下工程的顺利施工。测深中选择潜坝工程下游附近相对平坦的区域,水下高程范围约10.4-11.9m,水深约-12m,测量过程中在同一个测线上进行5次
单波束测深系统在测量过程中优势明显,设备构成较简单,便于随时携带,且安装过程方便。在实际作业过程中,要求对定位以及吃水位进行重新确定与改正,经过处理,软件界面操作正常,可采用多种成果输出方式[3]。但是单波束运用存在一定的局限性,难以准确测量相邻两点之间的微地形,在精度要求较高时难以得到准确数据。在计算机软件自动生成图形的过程中可能产生不够真实的地形图,尤其对测区边界河口处等高线的测量表现明显,测量数据可能出现扭曲变形现象。
测量操作中可采用加密测线的处理方式,提升水下测量区域的精度,但是运行中需投入较多的时间成本与人力成本[4]。多波束测深系统测量情况(如图3所示):

图3 多波束测深系统水下测量情况
多波束测深系统测量过程中具有复杂的外业作业处理方式及整体安装过程,测量过程中要求连接多项设备,并严格运用多种有效的连接方式,在连接作业完成后,对相关数据进行对比,严格参照JT/T 790-2010《多波束测深系统测量技术要求》中的相关规定,测深开始前,需进行必要的前提准备,如,横摇改正、艏向改正、时延改正、纵摇改正等。在实际测量工作中,要求结合实际测量工作需要,不断调整相关参数,进而得到最佳测量效果。
此种测量方式运用中,外业测量工作效率较高,能实现测量工作的全覆盖与全面测量,基本不会遗漏地形信息[5]。结测量,选取多个测量点完成测量作业。单波束测深系统按照一定的间距进行测量,难以实现全覆盖、无遗漏;多波束测深系统测量采用全覆盖扫描方式,是对单波束测深系统的重要补充,应用优势明显,能更加真实、客观地反映水下真实情况,为决策提供数据依据。
对水下地形进行测量时,单波束测深系统测量情况(如图2所示):合多波束测深系统原理,测量作业进行中应结合实际情况及作业管理规范,制定作业流程图,要求边沿波束重叠度符合相关作业标准,两条计划测线边沿波束达到高于20%的重叠度。与单波束测深系统相比对,多波束测深系统测量中处理数据较多,整体数据处理较复杂,要求精心选择合适的数据完成作图,操作要求较高。

图2 单波束测深系统水下测量情况
4.单波束测深系统与多波束测深系统数据对照分析
本次测深研究中,选取地下水位较为平坦的一处位置,分别进行单波束测深系统、多波束测深系统测量,根据测量结果得知:在#3组断面数据分析中,同一坐标中高程最大0.57m,最小0.19m。对10组数据分析对比可知:同一坐标中最大高程与最小高程分别为0.95m、0.19m,整体数值平均相差0.35m。
通过测量数据对比分析可知:在同一坐标点上,单波束测深系统得到与多波束测深系统相同的数据。通过实际测量可见,两种处理测量方式在实际测量中存在差异,单波束系统测量中有时出现相对较大的高差,相邻两点间的距离较远;多波束系统测量中,临近高差及相邻数据点间的距离较近。在实际测量中不易出现波动幅度较大的高程,因此,此种方式在对水下地形高程测量中,可对连接点变化情况进行分析,由此判断高程测量的实际情况,分析测量数据的可靠性。单波束系统测量中存在一定的局限性,难以准确判断高程数据的可靠性。
5.单波束测深系统与多波束测深系统测量结果分析
本次测量作业中,某#3组断面测深数据整合情况(如表1所示):

表1 某#3组断面测深数据整合
通过图2、图3对比分析可知:采用单波束测深系统能反映出河床整体的演变状态,采用多波束测深系统处理方式得到的数据,则对河床的演变趋势与形态进行更为清晰而直观地展示与表达,得到的数据点更为密集。由图2、图3所知,105m等高线在大小与形状表达上有所差异,主要是由于单波束测深系统运用中仅能测量线上的点,难以准确测量相邻两横断面间的点。地下水测量在水体流动状态下进行,与陆地水测量存在较大差异,难以精准测量每个特征点。
多波束测深方式与单波束测深方式相比,在对目标物形状、大小及高低变化情况的测量上具有明显优势,能绘制出更加详细精准的等高线,真实还原水下地形地貌。
6.结束语
本次研究对比两种测深系统作业流程及数据处理情况,通过对比得出以下测量结果:多波束测深系统能得到比单波束测深系统更密集的数据点,测深作业中能精准测量河床地形的高低与起伏变化情况,真实还原水下地形地貌。
(1)整体研究结果。本次研究对比两种测深系统作业流程及数据处理情况,通过对比得出以下测量结果:多波束测深系统测量能得到比单波束测深系统更密集的数据点,测深作业中能精准测量河床地形的高低与起伏变化情况,真实还原水下地形地貌。
(2)单波束测深系统与多波束测深系统运行对比。单波束测深系统测量仅能反映带状河道的走向情况。多波束系统测量具有较高精度,测量作业产生大量数据,为后续数据处理工作带来较大难度。其在浅滩地形测量中实施难度较大,不宜将其运用于水深较浅区域。其在水深较深的地下测量中则具有明显优势,尤其在水深大于-3m区域及小范围测量作业中。
单波束测深系统在1次采集任务结束后,即要求进行该项目比例尺的测图工作,这与多波束系统测量工作存在一定差异,后者在完成1次采集任务后可结合水下地形的实际测量情况及具体项目的开展要求而设置相应的比例尺,以此得出水下地形数据。
单波束测深系统与多波束测深系统在实际测量工作中往往使用不同的平台,在浅水区测量作业中,应避免测深设备的探头碰撞到河底的物体,影响正常的测量工作,两种测量方式对船型最低要求具有差异,单波束测深设备主要架设在冲锋舟吃水较浅或0.4m吃水高度以上的小型船舶中,多波束测深系统设备运行中要求架设在高于1m吃水高度的内河船舶上,在具体作业过程中需符合相关作业要求。
(3)实际测量分析。若测量区域水深为-0.5~3.0m,应使用单波束测深系统进行数据采集。单波束测深系统与多波束测深系统分别具有各自的使用特征,在多个领域中均有应用,例如,Sonic2026多波束测深系统在小浪底水利枢纽的应用,无人船搭载双频单波束测深系统的河道水下地形三维模型构建等。在实际测量工作中,多波束测深系统需使用较多的设备,设备的安装过程较为复杂,在外业操作上较为繁琐,这是其运用的缺陷。单波束测深系统的使用较为便捷,安装及调试过程较为简单。在具体测量工作中,需结合测量工作的具体要求选择适宜的测量方式。
猜你喜欢
舰船科学技术(2020年3期)2020-04-22
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
通信技术(2019年3期)2019-05-31
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
声学与电子工程(2017年1期)2017-06-22
故事大王(2016年7期)2016-09-22
少儿科学周刊·儿童版(2016年1期)2016-03-14
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
儿童故事画报(2013年3期)2013-06-24