
基于视觉传达的复杂图像自动化特征监控方法
2021-08-29 08:33:36刘梦
制造业自动化 2021年8期
刘 梦
(安阳职业技术学院,安阳 455008)
0 引言
基于视觉传达的计算机相关技术在近年来得到了长足的发展,在人们的日常生活中能够充分的体现出来。一些信息与数据的可视化即使也使得各行各业的工作模式产生了深刻的影响。机器视觉能够利用图像采集设备得到周围的环境图像,在视觉传达技术下,将其转换为机器能够识别的信号。用电子计算机直接实现了对于视觉信息处理的整个过程,这就已经形成了电子计算机视觉这门基础性的学科。随着电子信息技术飞速发展,这一门新兴学科也慢慢地成为当前正在研究的热门课题。在一些复杂的图像中,对其中的特征进行监控成为了目前的研究重点,在一些重要的医学、施工工程、生产工业等各个领域中应用都非常广泛。
对于复杂图像的特征监控来说,很多学者已经在该领域做出了一些研究成果。一些研究中主要针对监测物体的一元正态特点,在图像上得到了特征属性分布,进一步归纳出监控目标异常时的监控数据统计特点[1];在医学影像方面中,将肺结节患者的复杂CT影像中分别在提取了基于NSDT CT和基于Contourlet变换的小波纹理参数,对高维纹理参数则是采用了简单因子分析、Lasso回归等技术手段进行了低维降维。但是以上的传统特征监控方法中,对于多个图像不同分辨率下的特征处理效果较差,无法找到最合理的分块数量,导致了监控方法耗时长,效率低下,因此本文设计一种基于视觉传达的复杂图像自动化特征监控方法。
1 基于视觉传达的复杂图像自动化特征监控方法研究
1.1 分析复杂图像结构
在本文图像结构的分析方法中,主要采用的是在外结构霍巴多利模型。不同于经典的霍巴多利模型的复杂图像分析方法,在外结构霍巴多利模型中,需要重新描述复杂图像的特征向量,因此霍巴多利模型的复杂图像分析方法是由外结构视觉子、偏移视觉子、和位移视觉子共同设置的[2]。下面对这些视觉子在图像结构中的分析作用进行详细分析。
图1中是以霍巴多利模型为基础,在其中标记了复杂图像视觉子图像块的示意图,图中的实心圆表示复杂图像中的正图像块所在位置,实心三角形表示复杂图像中的负图像块所在位置。图1中的图像块位置分析能够体现出视觉子图像块在复杂图像中的分布特点,为了准确描述图像块外在的结构属性,并保证接收到的数据不发生失真,可以采用滤波响应手段。滤波响应一共两组,一组主要用来破译稀疏编码,另一组则能够随意调节方向。视觉子图像块特征采用特征向量F(x,I)进行描述,其中I表示图像编码,通过滤波响应完成稀疏表达学习后,完成滤波器组的滤波响应,并在某点x处成为特征描述的向量。其特征向量可以表示为:
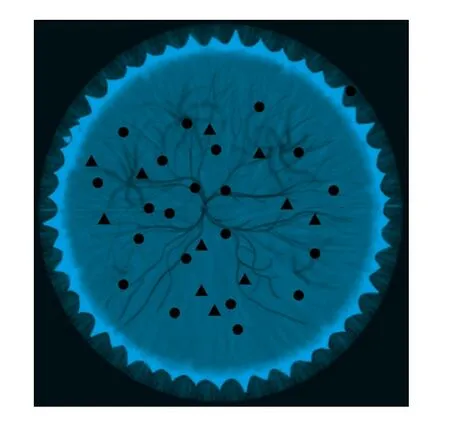
图1 霍巴多利模型中复杂图像视觉子图像块分析

式(1)中,x表示复杂图像中的某点;fi表示使用的两个滤波器组的代号,i的取值为1或2。Ij则表示图像编码中由于经过了多尺度的测量和标记,得到的第j个经过处理的图像[3]。
为保证复杂图像特征能够更加全面的处于监控状态,需要保证图像外观比较全面的暴露在监控范围内。因此本文采用两组滤波器组对复杂图像进行卷积,在调整图像方向的同时扩展特征向量,将滤波响应转换为可以监控的特征,最终得到的复杂图像外观可监控的特征视觉子可以表示为:

当复杂图像特征的线结构的目标中心被自动化监控方法统一默认为与旋转中心重合时,图像需要被监控到的特征与目标物体的定义中心也需要根据实际情况进行变化。当且仅当图像块位于目标的边界框内,计算偏移才有意义[4]。仅仅与最近邻的中心线点之间的距离才是有效的,这个中心线点距离虽然能够描述出特征点的便宜情况,但是在实际的监控应用中,为了保证特征点的监控精度,不可以将其直接作为特征点的偏移量代入计算。主要是由于中心线与特征点的切线的夹角范围内,特征点的位置会落在中心线上。这种情况下,中心线点距离在分量切向上的位置关系与中心线点之间不存在有效信息,因此,在实际情况中,图像分析的法向分量情况如图2所示。
图2中,(a)表示多中心霍巴多利模型,以上图为样本,当中心线与水平线的夹角为θ时,该绝对距离为dcosθ。假设发生的偏移为理想情况,此时中心线与水平线的夹角为0,(b)中的距离d表示特征图像块与中心线的绝对距离,有效距离为d。至此完成复杂图像结构的分析。
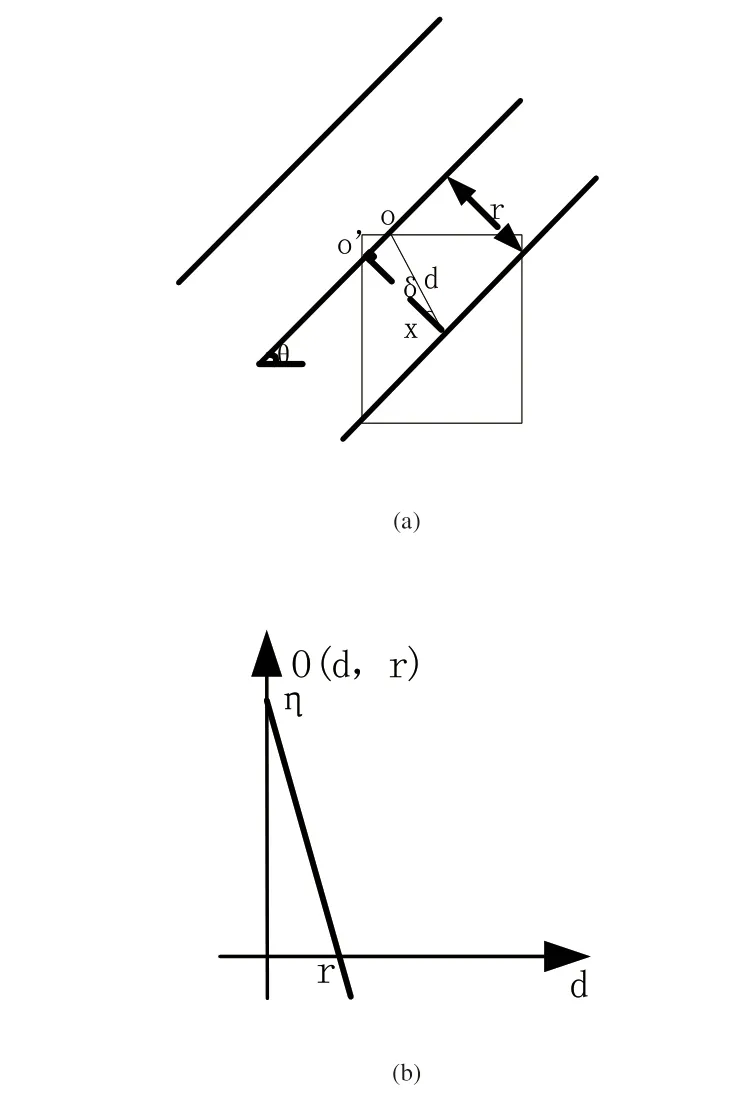
图2 有效偏离位移示意图
1.2 基于视觉传达的图像预处理
在对图像进行采集、获得、传递等处理时,所有图像都是由不同的程度上可见或不可见的噪音“污染”造成的。噪音来源主要有电子噪音、光子噪音、斑点噪音及量化噪音。若是信噪比越来越小,低于标准规范的水平,那么噪声一旦变得慢慢地转化为一个小的可见颗粒形态,就很有可能直接造成影像质量减弱[5]。除了影响到我们的视觉上影像质量的减少,噪声同样也很有可能地遮挡和掩盖了重要的影响力和其他影像细节,由于我们在工业现场所收集得到的影像,除了对于噪声的严重干扰外,由于强烈的太阳光照、固定支架上影像机的震荡以及影像的振动等各种环境因素,使得影像物体受到严重的污染,为此必须做出相应的对策就是对图像信号进行必要的去噪和处理,而滤波则是一种重要的去噪手段。本文使用的均值滤波操作由于其高频特性,也会使边缘变得模糊。设图像f(m,n)有M×M个像素,用非加权均值滤波后得到的图像为g(m,n)可以表示为:
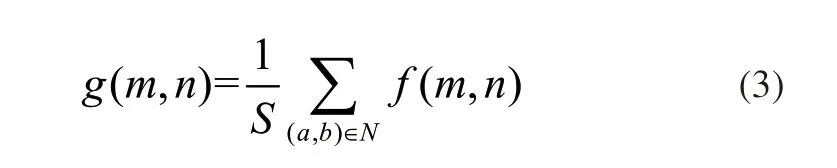
式(3)中,N是(x,y)的去心邻域,S为集合N包含的总像素数。在经过加权均值滤波后,S值越大,即邻域越大,则平滑效果越理想。除此之外,图像二值化法在图像预处理中也是非常重要的步骤,二值化处理能够区别信息的可用度,突出有用的信息,在模式识别等方面都有着重要的应用。当对比度发生强烈变化时,图像边缘检测点往往是图像特征的断点边界,所以利用边缘值的异常变化就能识别出特征信息并加以保存,去除掉无用的部分,可以大大的减少数据工作量。对图像进行预处理是分辨图像自动化特征成功的关键。
1.3 图像特征自动化提取与监控
从本质上看,图像特征是基于底层的图像特征所组成的。目前专家大多将图像特征分为一般全局特征和局部特征两大类型。全局性特征虽然显示特征全貌,但相对来讲稳定性较低,容易受到外界因素改变的影响,特征值会因此变化,全局性特征是指可以对一幅图像的整体性有简单描述,但对图像中的细节部分很难精准描述,对各种色彩纹理所处的空间位置难以精确表达的一种特征类型;局部特征是指图像中特征明显,有较为特殊本质的特性,他们具有良好的可区分性,也相对独立,不易因外界的因素变化而改变。在图像的颜色特征中,表达图像或者在图像中某一个特征点时,颜色是重要的区分手段。通过对特征点颜色的辨识与分类,能够对图像中的位置变化进行确定,例如图像的平移、收缩及方向上的变化[6]。颜色特征分类在特征点提取与匹配的过程中,图像颜色在图像灰度等方面都会有所差异,以此来构成一个完整的图像颜色。
相较于传统监控以时间顺序为图像数据序列的方法,本文中的图像序列和图像监控并不以时间为排序方式,在提出多点监控和双向监控的两种途径后,也得到了更为有效的监控效果。包括前向监控和后向监控,两种监控方式所占的重要比例是根据模型学习过程中的规则界定的,该权重可以在两者选择匹配过程中的无效监测降到最低,在常规情况下,能够较好的减少监控误差。
2 实验
为了验证本文设计的基于视觉传达的复杂图像自动化特征监控方法的有效性,本文需要设计实验对特征监控方法进行验证。将基于视觉传达的复杂图像自动化特征监控方法部署在具有若干节点的实验平台上,本文使用的是基于视觉传达的图像特征提取系统,实验平台的环境如表1所示。
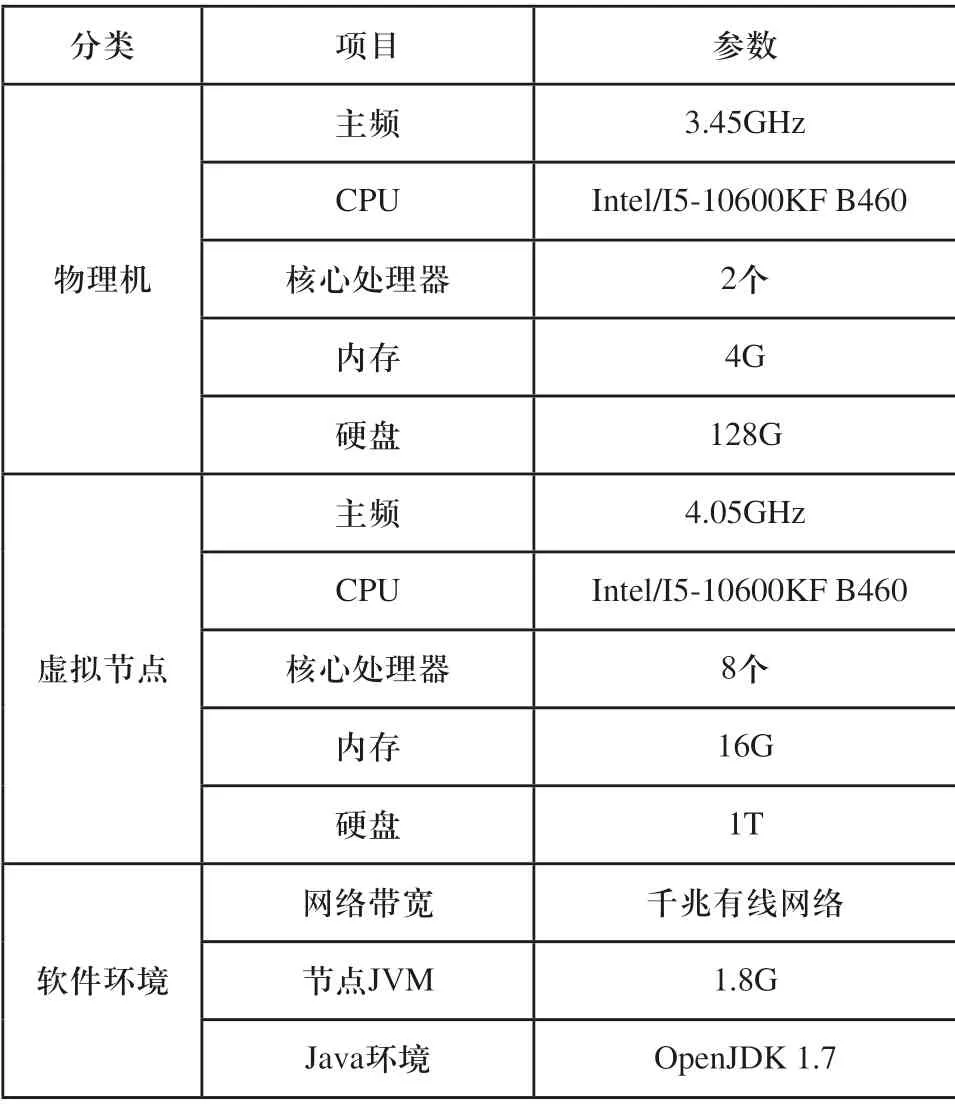
表1 实验环境参数
考虑到测试过程中的准确率和有效性,需要将测试样本多样化。本文选择不同分辨率的多个复杂图像作为监控对象,在测试过程中将复杂图像进行转码,将其帧率转换为34fps的流形式,并在实验程序中来模拟真实工作过程中的处理场景对复杂图像进行处理。测试中选择了若干个参数不同的复杂图像作为监控样本,其中部分复杂图像的相关参数如表2所示。
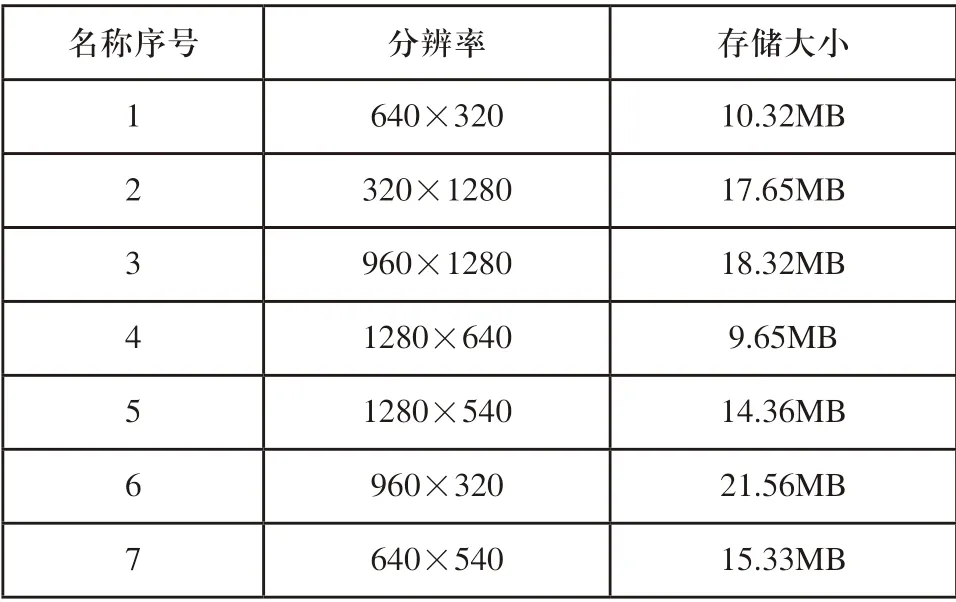
表2 复杂图像的相关参数
根据表2中的复杂图像信息,分别使用本文设计的基于视觉传达的复杂图像自动化监控方法和传统的特征监控方法进行处理,并对最终的实验结果进行对比与分析。
复杂图像的监控效率取决于对特征的处理效率,在实验中,传统方法和本文方法在不同的复杂图像中得到了不同的分块数量和处理耗时,统计的实验结果如表3所示。
从表3的实验结果可以看出,在传统的特征监控方法中,对于不同分辨率的复杂图像,都采用了相同的分块数量,没有针对性,因此导致了处理过程中耗时较长,造成处理效率低下,进一步影响监控效果[7]。本文设计的自动化特征监控方法中,能根据复杂图像的具体特征点情况对图像进行分块,能够达到较好的加速效果,验证了本文方法的有效性。
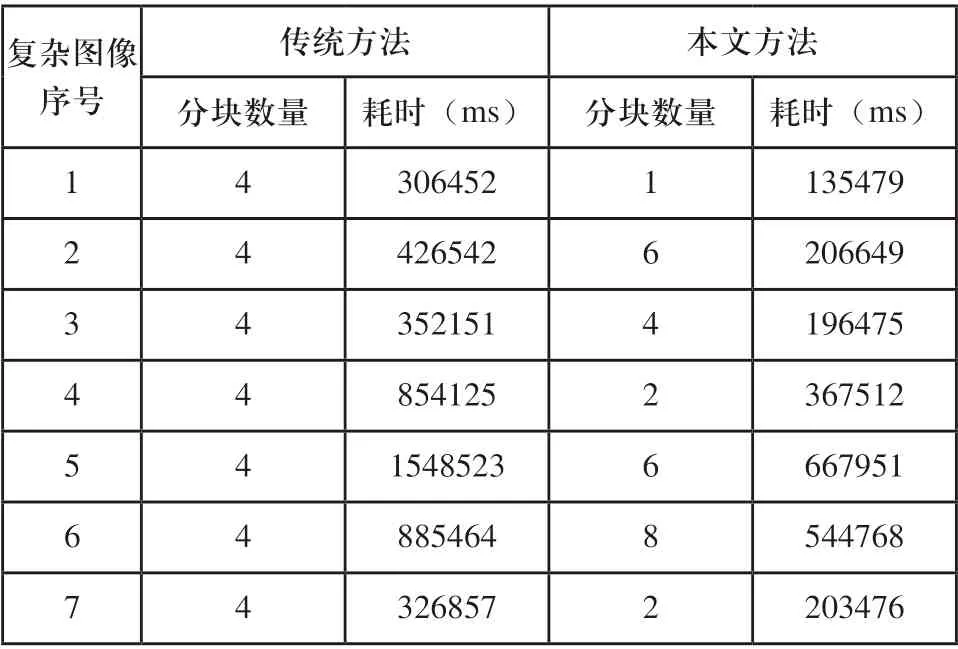
表3 实验结果对比与统计
3 结语
本文通过对复杂图像自动化特征的研究,充分论证了基于视觉传达的复杂图像自动化特征监控方法能显著提高处理效率,并且具有良好的扩展性。随着内容的复杂度提高,可通过增加处理节点的方式扩展处理能力。
猜你喜欢
少儿画王(7-10)(2022年9期)2022-05-30 10:48:04
作文评点报·作文素材小学版(2018年29期)2018-09-30 06:34:40
——目镜套筒
上海计量测试(2016年1期)2016-08-03 11:30:56
中外医疗(2015年5期)2016-01-04 03:57:53
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:00
河南科技(2014年8期)2014-02-27 14:08:08
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:41
