深空探测跳跃式再入返回任务设计
2021-08-29 06:05陈春亮张正峰盛瑞卿杨孟飞
深空探测学报 2021年3期
陈春亮,张正峰,盛瑞卿,杨孟飞
(1.北京空间飞行器总体设计部,北京 100094;2.中国空间技术研究院,北京 100094)
引 言
再入返回是开展深空探测任务的关键环节之一,具有再入速度高、气动环境恶劣、设计约束多等特点,涉及再入弹道与气动外形设计、再入制导、导航与控制(Guidance,Navigation and Control,GNC)、结构热防护等关键技术,对返回器的研制提出了很高的要求。
跳跃式再入返回方式是指通过两次再入大气实现飞行器的减速与着陆回收的再入方式。采用跳跃式再入返回方式可以有效地调节再入航程,降低气动过载,提高着陆精度,减少地面回收难度,有利于系统任务的执行。目前国内外已成功开展的类似的再入返回任务分别是美国的“阿波罗”(Apollo)载人登月任务、前苏联的Zond系列月球探测任务和中国的“嫦娥五号”(Chang'E-5,CE-5)任务。目前正在研制的深空探测任务中,美国新一代载人登月探测器“猎户座”(Orion)飞船也采用跳跃式的再入方式,并于2014年12月完成了无人飞行试验。
与国外同类任务相比,“嫦娥五号”的再入返回任务具有如下特点:
1)返回器规模小、重量轻、重量仅约300 kg,严苛的重量约束对返回舱气动、防热和控制系统的设计带来了较大的困难;
2)受到回收场位置和范围的约束,返回器再入航程长,达到近7 000 km;在长航程的情况下还要保证数10 km的落点精度,对气动参数的分析精度、再入走廊的控制及控制系统的设计提出了较高的要求。
本文针对跳跃式再入返回飞行器的特点,针对“嫦娥五号”再入返回任务,进行了再入返回过程的任务分析,并在此基础上提出了再入返回飞行器的设计思路。
1 深空探测跳跃式再入返回技术特点
跳跃式再入方式与弹道式再入、一次再入返回相比,具有峰值过载和热流密度小等优势,但也有一些新的技术特点和难点,主要体现在以下几个方面。
1)高马赫数下的气动问题更加复杂
返回器初次再入大气的速度接近第二宇宙速度,头部附近的空气温度高于1万 K,绕流气体已经电离和离解,稀薄气体效应和化学非平衡效应显著,对气动外形设计与气动参数精确性提出了更高的要求。
2)再入过程气动总加热量与时间增加
深空探测再入过程中气动峰值热流密度将达5~8 MW/m2,总加热量达500~700 MJ/m2,高于近地再入返回器,总加热时间也将增加,对结构热防护设计提出了较大困难。
3)再入过程中制导与控制精度要求更高
返回器初次再入段时间短,速度阻尼剧烈,在弹道控制方面不仅应确保满足航程和地球最终捕获的能量要求,还应提高初次再入段的终端状态精度,以减小二次再入的调整压力;针对气动不确定性的影响,还需考虑大气层外飞行段的弹道高度等问题,对制导与控制的鲁棒性提出了较高的要求。
4)二次烧蚀导致气动与防热性能存在偏差
跳跃式再入返回将使返回器经受两次气动热烧蚀,初次再入后,气动外形将由于首次烧蚀的影响发生一定变化,此外防热结构在二次烧蚀过程中的防热性能也存在不确定性,应采取相应的补偿控制措施[2]。
2 跳跃式再入返回任务分析
返回器在飞向地球并距离一定高度时,将与服务平台分离,再入大气并实现着陆。如图1所示为返回器跳跃式再入返回飞行航迹示意图,飞行过程分为大气层外自由飞行段、初次再入段、跳出飞行段、二次再入大气段等4个阶段。跳跃式再入返回任务分析将围绕以上各阶段进行说明。
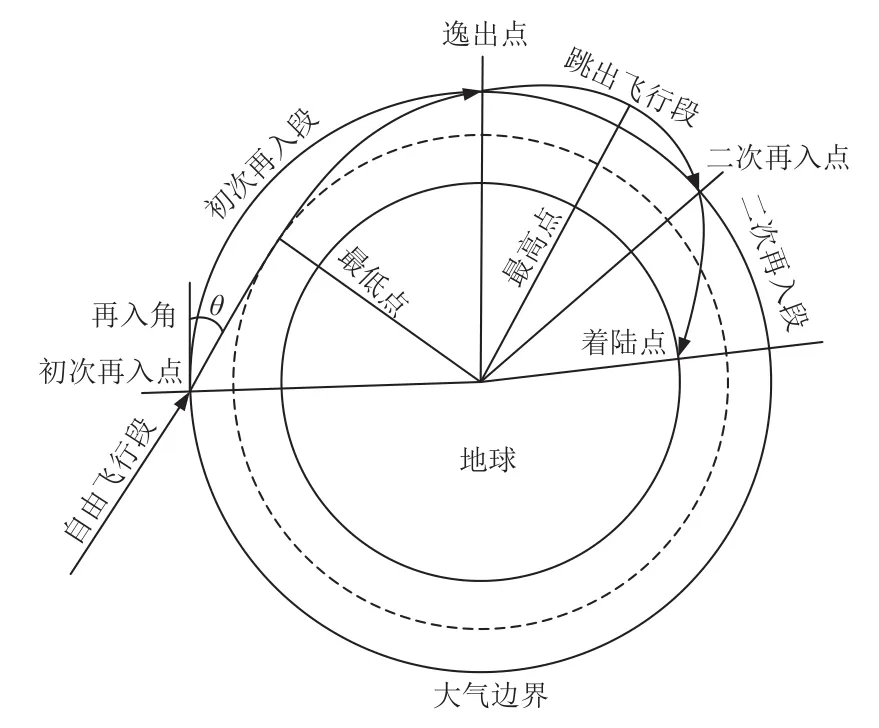
图1 跳跃式再入返回飞行航迹示意图Fig.1 Flight path diagram of return and reentry
2.1 再入返回任务分析流程
再入返回飞行器的任务分析内容主要为再入走廊、气动外形、再入弹道以及气动力/热载荷等,并以此提出对各分系统的功能和性能要求,如图2所示。
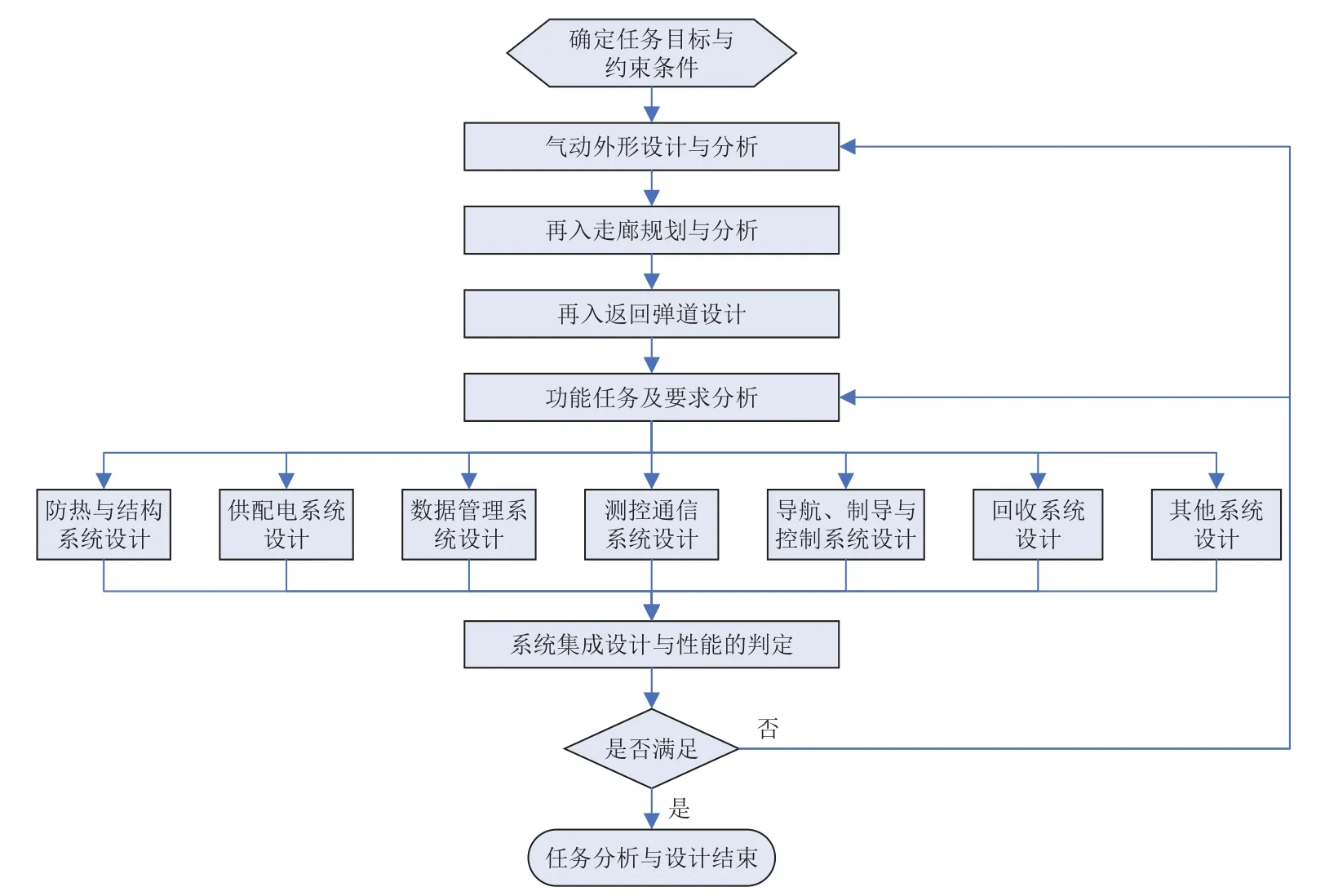
图2 再入返回飞行器任务分析与设计流程图Fig.2 Flow chart of the mission analysis and design for the Return and Reentry spacecraft
返回器任务分析与设计过程包括以下步骤:
1)确定返回器的任务目标与约束条件;
2)进行返回器气动特性指标需求初步分析;
3)根据再入点和着陆点的位置进行再入走廊规划;
4)进行气动外形设计,分析计算气动参数;
5)进行标称再入返回弹道的设计,确定返回器气动力/气动热环境条件;
6)进行功能任务分析,制定技术指标要求;
7)各相关系统按要求开展设计与仿真;
8)进行系统集成设计与性能的判定,判别是否满足任务要求,进行叠代优化设计。
从图2中可以看出,前6个环节属于任务分析阶段,后面的环节属于系统设计阶段。
2.2 再入返回约束条件分析
为保证返回器安全到达着陆点,再入返回任务的约束条件主要包括以下几方面因素。
1)返回的轨道参数:包括返回器的再入速度、再入角度以及再入点的精度等;
2)预定着陆位置与区域:包括着陆中心点的经纬度和着陆区的范围等因素;
3)气动力过载:指返回器在再入返回过程中可以承受的最大气动力载荷条件;
4)气动热载荷:包括返回器可适应的最大气动热载荷,如峰值热流密度、总加热量等;
5)其他约束:包括外形尺寸、重量、功耗、测控等约束,同时还应在AIT阶段具有良好的可实施性。
探月三期返回器研制的主要约束条件为
1)再入轨道倾角/(°):约45;
2)再入速度/(km•s−1):<11;
3)再入角度/(°):−6°附近;
4)再入航程/km:5 600~7 000 km;
5)着陆点位置:内蒙古四子王旗地区;
6)气动力/热载荷:气动力过载不大于7 g;
7)重量/kg:约300 。
2.3 气动外形设计与分析
返回器气动外形设计[3]的主要任务是确定返回器基本气动外形并进行优化设计,以满足飞行任务要求。深空探测再入返回地球大气时,返回器将以很高的马赫数穿过复杂流区,稀薄气体效应和化学非平衡等效应十分显著;此外还需考虑二次再入时由于烧蚀导致的外形变化对气动特性的影响,气动设计问题更加复杂,需深入分析各种效应对气动力、热特性的影响,并考虑返回器外形的适应性及优化问题。
探月三期返回器采用了类神舟飞船返回舱的球冠钟形体气动外形,该外形具有再入稳定性好、升阻比较高等优点,并通过大量的气动分析与试验工作验证了设计的正确性,主要包括两个方面工作。
1)质心位置分析与确定
返回器的质心位置对静稳定性和配平攻角的影响十分显著。图3给出了在不同质心位置下俯仰力矩系数随攻角的变化曲线。由图3可知,当纵向质心Xcg≤520 mm时满足具有唯一稳定配平点的需求。横向质心Ycg的确定是以保持配平攻角和升阻比为原则,在Ycg≈−42 mm的情况下,可保证升阻比不低于0.2。图3中,Cmz表示俯仰力矩系数,alf表示返回器的再入攻角,不同颜色的分别表示返回器质心在不同位置时俯仰力矩系数随攻角的变化。

图3 不同质心位置返回器俯仰力矩系数曲线图Fig.3 Curve of pitching torque coefficient of reentry capsule with different positions of mass center
2)气动外形优化分析
返回器的局部外形对气动特性也有较大的影响。探月三期返回器根据性能提升需求,综合考虑重量尺寸、热流密度等因素,进行了去前端框和去发动机舱、降低器间分离突台高度的适应性设计,同时对大底半径、侧壁倒锥角、耳片布局位置等多项参数进行了叠代优化设计,获得了优化后的气动外形,如图4所示。

图4 返回器优化后外形图Fig.4 Shape for Optimized reentry capsule
2.4 再入走廊分析
返回器再入大气层后,根据再入点轨道参数、气动特性和控制方式的不同,能够按照不同的再入弹道进行飞行,这些再入弹道可以产生一个再入弹道区间,此区间称为再入走廊。再入走廊与再入过程中的气动力/热环境、再入航程密切相关。再入走廊的上、下边界分别对应的两种情况。
1)再入走廊下边界,当再入角过大时,会导致返回器航程实现能力变短且过载与热流密度增大,以返回器能够实现再入航程要求的最大再入角为再入走廊下边界。经分析,探月三期返回器在不大于−6.2°再入角的情况下,可以实现纵向航程为5 600~7 000 km,横向航程调节能力为200 km,满足要求。
2)再入走廊上边界,当再入角过小时,返回器掠过大气层,之后继续环绕地球飞行,不能正常再入,以返回器能够正常再入地球大气的再入角为再入走廊上边界。经分析,探月三期返回器在不小于−4.9°再入角的情况下,可以满足纵向航程距离和横向航程调节需要。
图5中给出了探月三期返回器在不同再入角情况下的最小和最大航程边界,可以看出,在再入角−5.75°附近具有最大的航程调节能力,综合考虑其他误差因素,确定返回器再入角范围为−5.75°±0.2°。
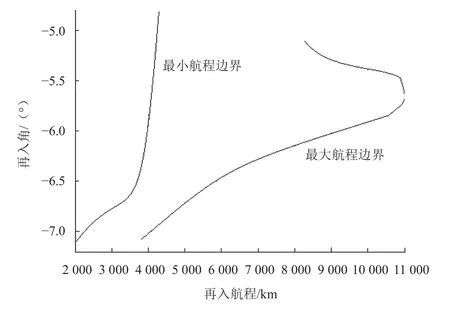
图5 不同再入角的再入航程可实现能力图Fig.5 Capability of reentry range with different reentry angles
2.5 再入返回弹道设计
根据再入走廊分析结果,在再入轨道参数与着陆区确定的情况下,可以得到返回器的标准再入返回弹道设计结果。图6给出了探月三期返回器在航程为7 000 km时的再入弹道示意图。根据此设计结果,可计算出返回器在此弹道下的气动过载和热环境条件,该条件可作为对防热结构的设计输入。
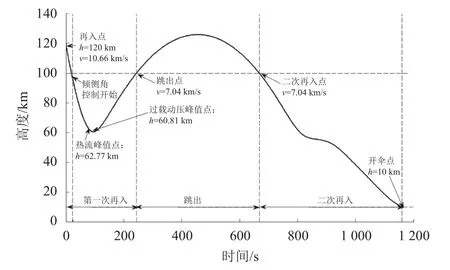
图6 返回器典型再入弹道示意图Fig.6 Typical reentry trajectory of the reentry capsule
2.6 功能任务及要求分析
结合工程任务要求,需按照航天器系统工程的设计思路进行返回器功能任务的分析并明确对各相关组成部分的要求。在深空采样返回任务中,返回器的主要任务是携带月球样品返回地球,功能任务较为独立,一般采用单舱单独设计方式,与其他舱段(服务平台)设有机械、电气接口。返回器应具备的主要功能包括结构与防热、供配电、数据管理、测控通信、制导、导航与控制(Guidance Navigation and Control,GNC)、着陆回收等。
3 返回器系统设计
3.1 系统组成设计
根据任务分析结果,返回器可分为结构与防热、供配电、数据管理、测控通信、GNC、回收着陆、热控以及探测载荷等分系统,并与服务平台设有机械、电气接口。如图7所示,为探月三期返回器的系统组成。
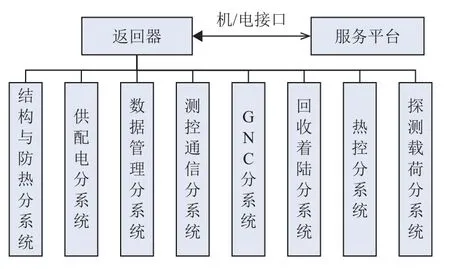
图7 返回器系统组成示意图Fig.7 System structure of the reentry capsule
3.2 再入返回飞行程序设计
在返回器进入大气前并与服务平台分离后,首先进行滑行飞行并以再入姿态进入大气层,随后采用跳跃式再入方式飞行,到达特定开伞高度时弹出降落伞并打开回收信标机,返回器减速下降直至在地面着陆。探月三期返回器再入返回飞行过程如图8所示,整个过程约为50 min。
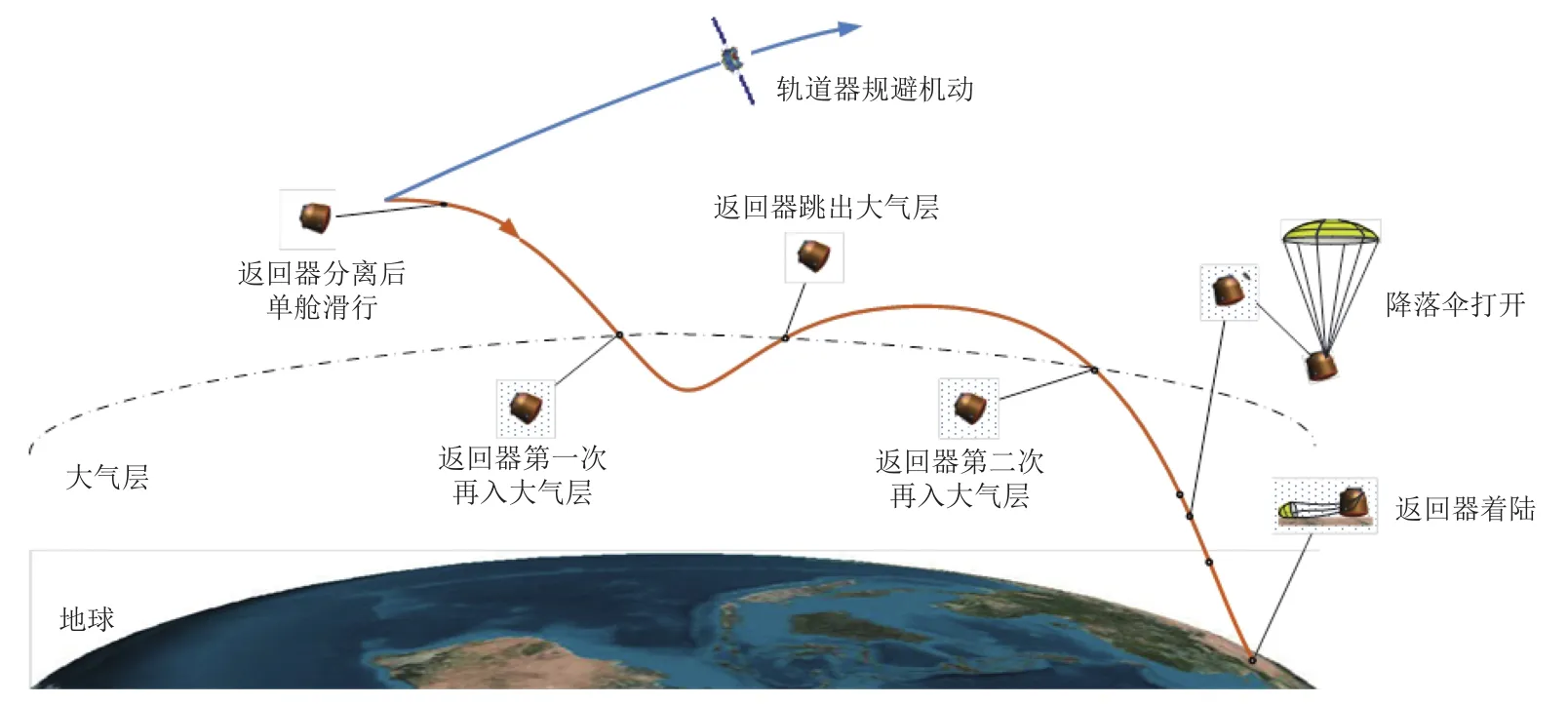
图8 返回器再入返回飞行过程示意图Fig.8 Flight path of the reentry capsule
3.3 构型布局设计
构型布局设计的任务是在气动外形等约束条件下,确定返回器的构型并进行设备安装布局设计。
探月三期返回器构型分为前端、侧壁、大梁、大底4个部分[4]。前端是用来安装探测载荷、样品容器接收装置等设备;侧壁用来布置测控与回收信标天线、推进系统管路及发动机,并安装有降落伞装置;大梁主要用来安装各类电子设备;大底为承力结构与防热结构,是缓冲着陆冲击载荷的关键部位,大底底部设有与服务平台连接的钛管。返回器结构构型分解如图9所示。
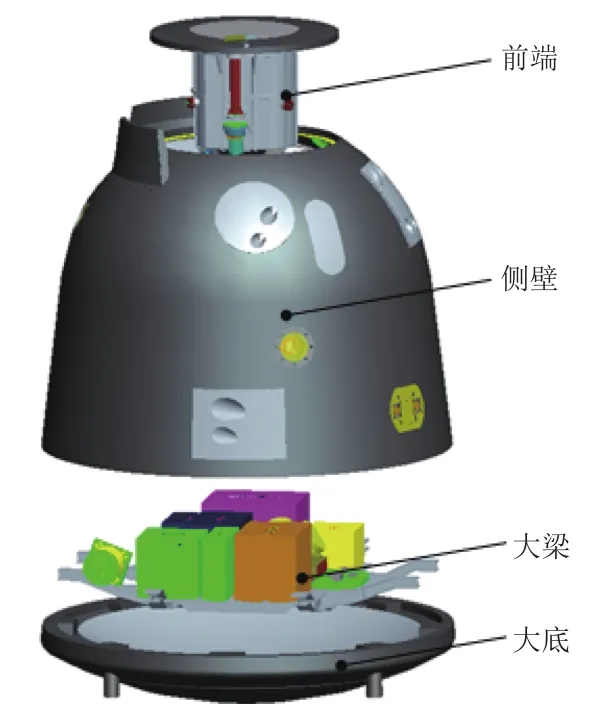
图9 返回器结构构型分解示意图Fig.9 The structure and configuration of the reentry capsule
3.4 关键任务环节设计
1)防热结构设计
如图9所示,返回器结构分为前端、侧壁、大梁和大底4个部件,其中前端、侧壁和大底三部分均由内侧金属承力结构和外部防热结构两部分组成,器表采用全烧蚀防热结构方案,根据不同部位的防热要求,采用了变材料、变厚度的轻量化设计方法,共采用了FG4、FG7、SPQ9等7种新型防热材料,显著的降低了防热结构占返回器总重量的比例。
2)再入GNC设计
返回器再入GNC的任务是消除姿态干扰,建立配平姿态,通过控制升力实现跳跃式飞行。再入GNC设计分为导航、制导与姿态控制3个部分。探月三期返回器采用了GPS+SINS联合导航方案,可以在GPS可用弧段内引入位置与速度信息以提高导航精度;制导方案采用了预测–校正法,通过对落点位置进行预测及时调整再入弹道,姿态控制方案采用相平面喷气控制方式,通过推力器进行姿态的机动和稳定控制。
3)回收着陆设计
返回器[6]通常采用降落伞装置实现进一步的减速直至在地面着陆。探月三期返回器采用了两级降落伞的减速方案,在下降到开伞点高度时,将首先弹出减速伞,减速伞工作达到稳定状态后与返回器脱开,同时拉出主降落伞,主伞完全充气后进一步减速,最后以小于13 m/s的速度安全着陆。
4 探月三期返回器在轨飞行结果
2020年11月24日—12月17日,我国成功完成探月三期“嫦娥五号”任务。返回器在2020年12月17日距离地球5 000 km高度与轨道器分离,分离后按照预定弹道飞行,20 min后再入地球大气,再入角为–5.748°,偏差为0.002°。返回器在轨飞行图像如图10所示,返回器再入过程中程序执行正确,状态良好,实际飞行弹道与标称弹道一致,最大过载小于5 g,气动外形保持完好,防热结构烧蚀情况符合预期,返回器飞行至距地面11.29 km高度时,自动执行了开伞程序,开伞后飞行状态良好,开伞点控制精度达到500 m,再入航程为6 515 km,着陆点精度1.3 km,实现了高精度着陆,并将月球样品安全带回地球,“嫦娥五号”任务取得圆满成功[7-10]。

图10 返回舱在轨飞行图像Fig.10 The reentry capsule in orbit
5 结 论
深空探测跳跃式再入返回具有关键技术多、地面验证难等特点,且各设计要素关联紧密,耦合程度高。本文对深空探测跳跃式再入返回任务的技术特点进行了分析,制定了再入返回任务分析流程,按照多学科优化设计的思路开展了系统任务分析,并在此基础上提出了返回器的系统设计思路。通过“嫦娥五号”任务的实际在轨飞行结果,有效地验证了跳跃式再入返回任务分析与设计思路的正确性,可以为后续相关深空探测再入返回与行星探测进入任务提供借鉴。
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
中国品牌(2021年7期)2021-08-09
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
小天使·三年级语数英综合(2019年5期)2019-06-27
海峡姐妹(2019年5期)2019-06-18
百科探秘·航空航天(2017年12期)2018-01-31
北京航空航天大学学报(2017年11期)2017-04-23
航海(2016年2期)2016-05-19